新型可调节扶正器设计
2018-12-06焦利明陈江义
焦利明,陈江义
(1.中国电子科技集团公司第二十二研究所 河南 新乡 453003;2.郑州大学机械工程学院 河南 郑州 450001)
0 引 言
目前油田固井质量检查的方法主要是声波幅度测井和声波变密度测井[1-2],声波类仪器的测井原理对其居中性提出了很高的要求,扶正器的好坏直接影响到套管检查质量。
油田采用的扶正器主要有套在仪器上的刚性扶正器、板簧扶正器[3]、以及推靠式的扶正器[4]等几种形式。推靠式扶正器因无电机驱动,在运输过程中多为捆绑式,且对推靠力无法自我调节。
通过调节装置实现非工作状态下的臂收拢,解决了运输的捆绑不便,同时可根据井眼等实际需要进行推靠力和测量范围的调整。
1 结构设计
扶正器整体结构如图1所示,主要有测量范围调节装置、支撑臂组件、力调节装置、芯轴等组成。芯轴和接头处用O形圈密封。扶正器内部结构如图2所示。

1-上接头;2-连接螺套;3-调节螺套;4-弹簧筒;5-弹簧;6-支撑臂组件;7-芯轴;8-下接头图1 扶正器整体结构示意图

1-密封圈;2-上接头;3-防转键;4-连接螺套;5-调节螺套;6-弹簧;7-弹簧筒;8-支撑臂;9-调节螺钉;10-上调节环;11-轴承;12-下调节环;13-芯轴;14-下接头图2 扶正器内部结构图
1.1 测量范围调节装置
上调节环为左旋螺纹,下调节环为右旋螺纹,芯轴上螺纹与之对应。
工作状态如图3所示,调节螺钉拧入芯轴上的键槽中,和弹簧筒完全脱离,弹簧筒和支撑臂随井眼变化左右移动。
调节过程:将上下两侧调节螺钉向外拧,调节螺钉和芯轴脱离,进入弹簧筒,将弹簧筒和调节环连接,此时,转动支撑臂组件,两个弹簧筒分别向两侧移动,达到和套管合适的测量范围后,将调节螺钉向内拧紧,螺钉脱离弹簧筒进入芯轴上的键槽,此时仪器可进入工作状态。

图3 工作状态
在运输过程中,将支撑臂调节到和仪器相同外径,如图4所示,即可运输,避免了传统扶正器的捆绑难题。
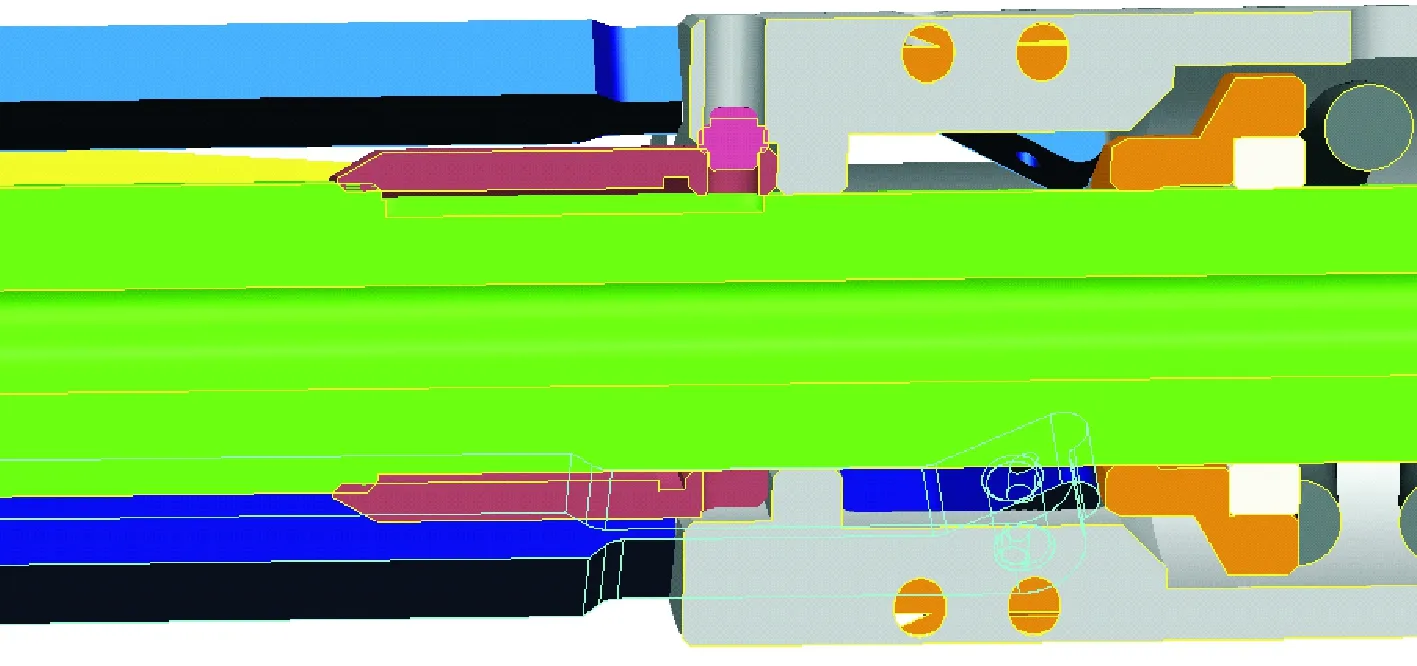
图4 调节至收拢
1.2 力调节装置
扶正器采用弹簧提供支撑力,调节螺套和弹簧筒通过螺纹相连,螺纹旋合的长度直接影响弹簧的压缩量,从而通过调节旋合长度可调节支撑力。
2 力学分析计算
2.1 芯轴分析
仪器指标要求抗拉30 kN,抗扭800 N×m,由于芯轴的对称结构,取其一半进行受力分析,分析结果,如图5~图9所示。
2.2 扶正力计算
扶正臂可简化为图10所示模型,其中α为扶正臂与仪器轴线夹角,F为扶正臂对井壁的推靠力,由于仪器两组压簧同时压缩,因此F/2与其中一组压簧的弹力P对O点力矩平衡。按设计,扶正臂张开收拢过程中,0°≤α≤37.4°。

图5 网格划分

图6 受拉状态下的等效应力

图7 受拉状态下的位移变形

图8 扭力状态下的等效应力

图9 扭力状态下的位移变形
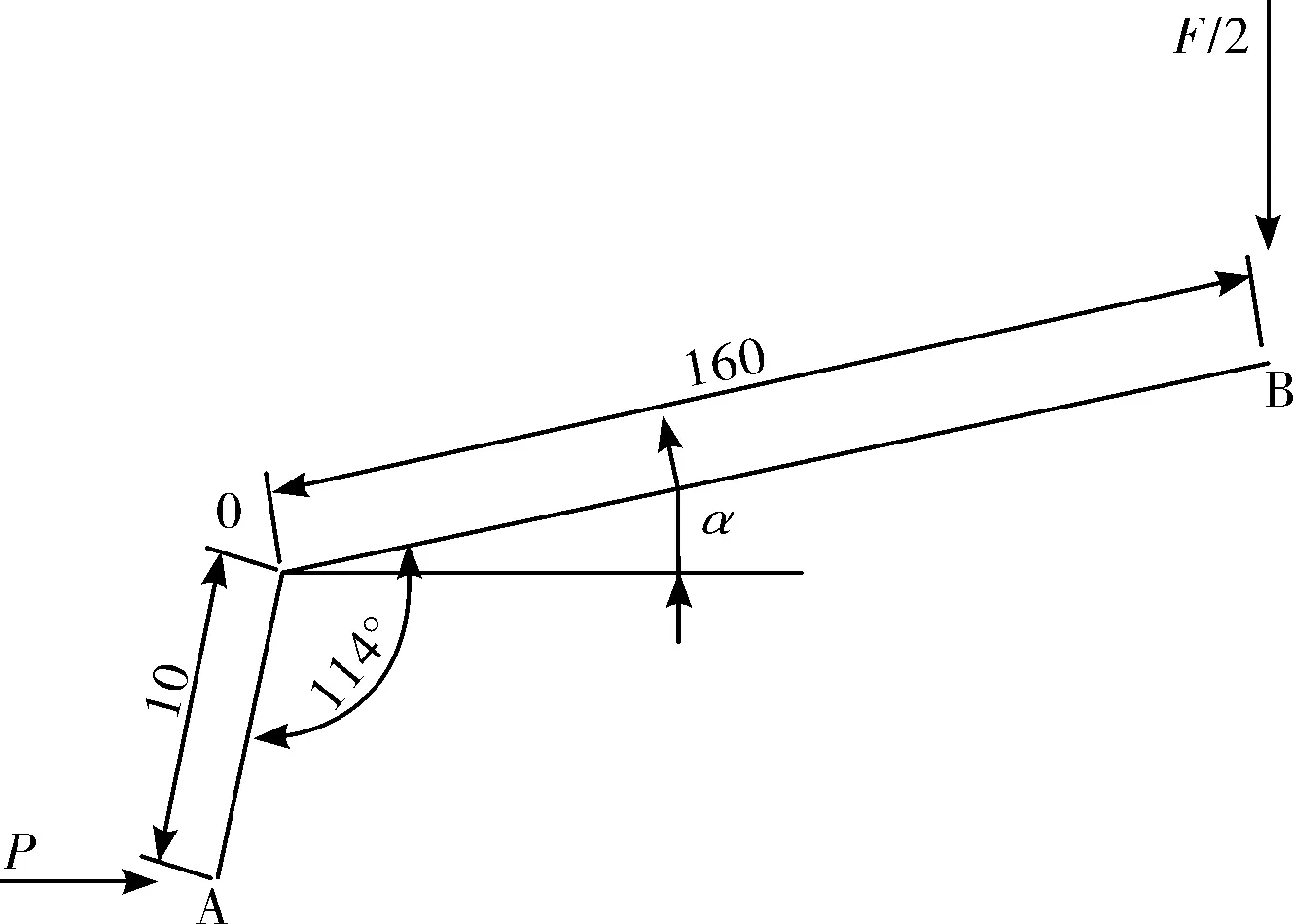
图10 支撑臂示意图
则弹簧的工作行程:

(1)
综合考虑压簧设计参数为:材料为12Cr18Ni9,线径d=12 mm,中径D2=46 mm,有效圈数n=6,原始高度H0=127.5 mm,工作高度H1=113.3 mm,工作高度H2=106.9 mm。
根据公式[5]
(2)
计算得弹簧工作载荷分别为P1=4 490 N、P2=6 457 N,弹簧刚度k=314 N/mm。
以O点为支点,力矩平衡:

(3)
α=0时,P=P2,按几何关系可得:
(4)
得:

(5)
在Adams软件中建立仿真模型[6],进行运动学仿真,由于设计机构具备可调节力功能,在此做如下假设:1)弹簧初始力为0;2)力调节装置不使用,弹簧力可压缩为理论最大。
仿真结果如图11所示,红线为弹簧力,蓝线为角度, 从中可看出弹簧力和角度的对应关系。

图11 弹簧力与角度对应关系
3 关键技术及优势
1)该扶正器具有测量范围调节装置,可根据套管尺寸进行预先调节,满足不同井眼的需求,同时可避免在运输过程中进行捆绑等操作。
2)力调节装置的存在,可根据需要进行支撑力的调整。
4 结 论
该扶正器可在声波类仪器测井过程中使用,其测量范围调节功能,可满足不同井眼的需要,应用范围较广,并可根据仪器串的长度和重量调节推靠力。
目前该扶正器已在川庆、西部钻探等油田推广使用,扶正效果得到验证。
