一种爬坡机器人设计与实现*
2018-12-06许笃添陈公兴何志强陈嘉扬余冠群
许笃添,陈公兴,何志强,陈嘉扬,余冠群
一种爬坡机器人设计与实现*
许笃添,陈公兴,何志强,陈嘉扬,余冠群
(广东技术师范学院天河学院电气与电子工程学院,广东 广州 510540)
机器人是机械科学与电子信息技术相结合的产物,是计算机科学、控制理论、信息科学和传感技术等多交叉学科综合性高科技产物,它是一种仿人操作、高速运行、重复操作和精度较高的自动化设备。机器人技术的出现和发展,不但使工业生产和科学研究发生变化,而且对人类的社会生活产生了深远的影响。
传感装置;自动化设备;爬坡机器人;坡度
在作品设计中,对不同板块传感装置的相关信号进行检测,通过手机APP,利用蓝牙模块通信,控制爬坡机器人完成既定任务,实现在不同坡度下的爬坡功能。以A53开发板为控制核心,爬坡机器人通过L298N芯片实现对电机运转的控制,能够自行对轨迹路线进行识别,当遇到障碍物时能调整方向实现避障绕行,沿着斜坡前进,直达目标地。
爬坡机器人作为移动机器人的一个应用分支,它涉及机械学、控制学、仿生学及信息处理技术等多个学科。随着机器人技术的发展和社会需求的日益扩大,爬坡机器人在实际执行任务的过程中,不可避免地会遇到路面比较复杂、坡道较多的地形,爬坡、越障能力成为衡量其性能的主要指标,逐渐成为国内外机器人研究领域的一个热点。
1 爬坡机器人方案设计与动力学建模
如图1所示,爬坡机器人以A53开发板为控制核心,经过相关传感装置等获得的数据信息将其传递给CPU,借助主控的操作,完成电机的运作,进而准确地躲避障碍物,保持持续前进,通过蓝牙控制,在设定的斜坡中行驶。

图1 系统总体框架
根据爬坡机器人的重力与斜坡角度计算出电机驱动车轮的转矩,从而保证机器人沿斜坡方向的平衡度。通过机器人车轮滚动摩阻和摩擦力矩的数值计算出相应的驱动转矩,使得机器人不会后滑,提高了机器人的爬坡能力。机器人车体的动力学分析、机器人车轮的动力学分析分别如图2和图3所示。

图2 机器人车体的动力学分析
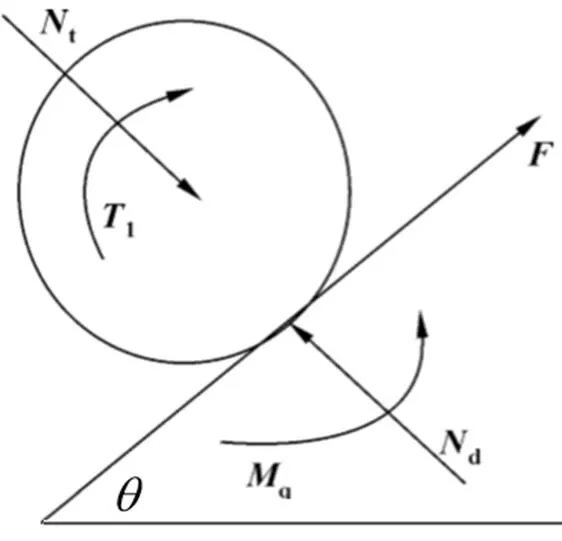
图3 机器人车轮的动力学分析
基于图2和图3的分析,可列出爬坡机器人动力学平衡方程:



联合以上3个方程,可以得到:



机器人驱动轮所需要的驱动力矩为:
1=qd+r. (7)
式(7)中:q为滚动摩阻因数;为摩擦力;为驱动轮半径。
2 系统程序设计
在智能爬坡机器人的设计中,通过手机APP,借助蓝牙模块,手机发出指令,随后运用红外传感装置达到躲避障碍物的效果。将获得的信息传递到主处理器设备方面,进而使爬坡机器人在合理的轨道上前进后退,系统程序流程如图4所示。

图4 系统程序流程图
3 系统调试
在蓝牙无法配对时,手机APP和蓝牙指示灯闪烁,需要调整蓝牙的参数。
3.1 修改AT命令集
测试通讯方面,发送AT(返回OK,1 s左右发1次),返回OK。
3.2 修改蓝牙串口通讯波特率
发送AT+BAUD1,返回OK1200;发送AT+BAUD2,返回OK2400。
3.3 改蓝牙配对密码
发送AT+PINXXXX,返回OKsetpin。
参数xxxx:所要设置的配对密码,4个字节,此命令可用于从机或主机。从机是适配器或手机弹出要求输入配对密码窗口时,手工输入此参数就可以连接从机。主机则是在用主蓝牙模块时,机器人是从机,找到机器人的配对密码,再设置主蓝牙模块。爬坡机器人控制界面与实物如图5所示。
经过反复调试,爬坡机器人能通过蓝牙控制,顺利爬坡并避开障碍物,具备以下功能:①通过手机APP控制,可以直线行走和转弯、调速、爬坡等;②当探测到前方存在障碍物时,适当地改变方向,进行避障;③在0°~45°斜坡上,能够实现爬坡任务。

图5 爬坡机器人控制界面与实物
[1]王晶,翁显耀,梁业宗,等.自动寻迹爬坡机器人小车的传感器模块设计[J].现代电子技术,2008,31(22).
[2]孙颖.基于路径规划的智能爬坡机器人小车控制系统研究[D].青岛:青岛大学,2007.
[3]密加永.基于智能汽车的控制算法的研究与应用[D].济宁:曲阜师范大学,2008.
TP242
A
10.15913/j.cnki.kjycx.2018.22.116
2095-6835(2018)22-0116-02
2016年国家级大学生创新创业训练计划项目(项目编号:201612668005)
陈公兴。
〔编辑:张思楠〕