康复辅助机器人及其物理人机交互方法
2018-12-05彭亮侯增广王晨罗林聪王卫群
彭亮 侯增广 王晨 罗林聪 王卫群
随着自动化和人工智能技术的发展,智能机器人应用不再局限于传统的工业和制造业,而被广泛应用到医疗健康、教育服务、军事和空间探索等领域.其中,随着计算机、传感器、神经工程、信息处理等技术的飞速发展,康复与辅助机器人的广泛研究也已经有近30年的历史.康复与辅助机器人的发展不仅为神经科学和康复医学带来了极大的技术进步和观念变革,而且作为一种高新技术产业已经成为世界经济新的增长点,相关研究得到世界各国的重视,成为技术竞争的重要领域之一[1].同时,随着全球特别是中国社会老龄化的加剧,对康复辅助机器人的需求也在不断增加,为该领域的发展提供了更广阔的市场空间和难得的发展机遇.
中国人口老龄化形势严峻,已经成为世界上老年人最多的国家.截止到2014年底,我国60岁以上老龄人口已达2.12亿,并且将在2025年达到3亿.同时,由脑卒中、脊髓损伤、脑外伤等原因造成的残障人口数量迅速增长,我国肢体残疾人口逾2400万,每年新增脑卒中患者约200万,大多数患者都具有一定程度的功能障碍.传统的康复训练基于人工手段,而我国专业治疗师非常紧缺,美国康复治疗师数量为70人/10万人,而我国目前仅为0.4人/10万人,且专业水平低,无法满足日益增长的需求.康复辅助机器人的使用能够提高康复效率,降低治疗成本,减少人员需求和体力消耗,同时可以提高康复效果,其研究进展为神经损伤患者、残疾人、老年人的功能康复和生活辅助带来了希望.
康复辅助机器人涉及神经科学、生物力学、人因工程、机器人自动控制等领域知识,是典型的多学科交叉的复杂系统,其研究具有较高的挑战性.其中机器人自动控制起着非常关键的作用,在充分理解临床实际需求的基础上,需要利用控制理论的建模、分析与综合工具,并结合其他学科理论和技术,最终实现临床目标.
与其他机器人相比,康复辅助机器人有其不同特点和控制要求.康复辅助机器人的作业对象是人,其性能必须满足对个体差异和环境变化的适应性,人机交互的柔顺性,面对异常情况的安全性,以及对人体生理心理的适应性等要求,从而对控制系统的准确性、可靠性、智能化水平等都提出更高的要求.
在康复辅助机器人应用中,由人和机器人两个具有一定自主性的个体共同完成目标,两者之间的双向信息交流非常重要.另一方面,对于康复辅助机器人,人和机器人耦合在一起,存在物理人机交互(Physical human-robot interaction,pHRI),两者之间的角色分配和能量交互控制非常关键[2].首先,机器人需要了解人的意图,配合其完成期望的运动,即意图识别过程;然后,人和机器人在交互中的角色和作用在动态改变,人机之间的能量交互过程随之进行动态调整,以满足康复或辅助的目标,即交互控制策略[3].除此之外,机器人需要将其当前的状态及时反馈给人,同时保证人在交互过程中的安全[4].
本文以神经康复机器人、穿戴式外骨骼、智能假肢等应用为例,介绍当前的研究现状,并重点探讨人体运动意图检测方法和交互控制方法等研究重点和难点.最后展望该领域的未来技术发展方向.
1 康复辅助机器人的发展现状
康复辅助机器人的广泛研究开始于20世纪90年代,最早是以工业机器人作为研究平台,随着研究的深入,逐渐成为独立的机器人大类,包括神经康复机器人、穿戴式外骨骼、智能假肢、智能轮椅等.以神经康复机器人为例,按照不同的训练部位划分,有上肢、下肢、手指、手腕、踝关节等不同种类,根据文献[5]统计,目前处于研究阶段的各类上肢康复机器人已经超过100种.
1.1 神经康复机器人
按照机器人的结构特点,神经康复机器人可以分为末端牵引式和外骨骼式两大类,前者主要采用多连杆机构,通过末端执行器与患者肢体末端接触;后者仿照人体结构进行设计,实现与患者各关节运动的对应.
早期上肢康复机器人以美国麻省理工学院的MIT-Manus[6]机器人为代表,属于末端牵引式,主体结构采用平面五连杆,共两个自由度,主要用于中风患者肩、肘关节的康复运动训练(图1(a)).该机器人采用阻抗控制方法,根据不同患者设计不同的力场,患者借助机器人的辅助学习运动技巧,实现功能康复[7].由苏黎世联邦理工大学研发的ARMin[8]上肢康复机器人,是外骨骼式上肢康复机器人的典型代表,共5个自由度(肩部3个、肘部1个、前臂1个),能够实现肩关节内收/外展、旋内/旋外、前屈/后伸,肘关节屈/伸,前臂旋前/旋后等动作,手部设计了用以辅助抓握训练的模块,并配有力传感器,提供主动训练模式.该机器人还集成了虚拟现实训练环境,可以模拟做饭、打扫等日常动作.多中心随机对照临床试验结果证明,ARMin对于患者的康复能够取得较好效果[9].瑞士Hocoma公司已经将ARMin机器人成功商业化,并在其基础上开发出Armeo Power系列康复机器人(图1(b)).
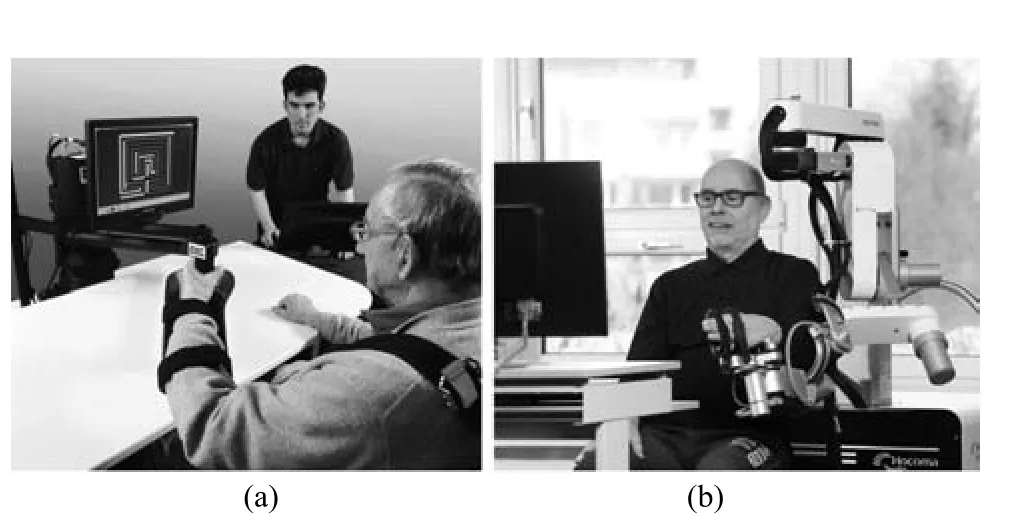
图1 MIT-Manus与Armeo Power上肢康复机器人Fig.1 MIT-Manus and Armeo Power upper limb rehabilitation robots
下肢康复机器人所需扭矩较大,同时需要考虑支撑人体部分甚至全部重量,以悬吊减重式为主要形式.国际上最具影响力的是由瑞士苏黎世大学医学院、苏黎世联邦理工学院、苏黎世大学、Hocoma公司和德国Woodway公司联合研发,由Hocoma公司商业化的Lokomat[10]下肢康复机器人(图2).它主要由一对腿部外骨骼、跑步机和悬吊减重系统构成,其中每条腿部外骨骼有两个自由度,控制髋膝关节在矢状面屈伸运动,同时与跑步机和虚拟现实训练界面同步配合,实现下肢的模拟步态训练.为满足不同患者的康复需求,Lokomat实现了多种主被动训练策略[11],根据患者在训练过程中的实际表现对辅助力进行调整.

图2 瑞士Hocoma公司的Lokomat下肢康复机器Fig.2 Lokomat lower limb rehabilitation robot
1.2 穿戴式外骨骼机器人
穿戴式外骨骼机器人是近些年发展起来的一种新型机器人,具有极大的灵活性和空间拓展性,其穿戴于患者身上,对人体运动能力具有一定的的延伸、补偿甚至超越的功能[12].具有代表性的是美国加州大学伯克利分校研发的BLEEX[13]助力型下肢外骨骼机器人,由液压驱动,采用仿生设计,每条腿有7个自由度,包含30多个传感器,可在负重75kg下以0.9m/s速度行走,主要应用于士兵野外作战.继BLEEX研制成功后,其技术由军用转向民用,研发出了Ekso[14]系列下肢外骨骼,主要用于帮助下肢失去行动能力的截瘫患者或下肢肌无力患者重新站立起来.日本筑波大学研发的HAL[15]系列外骨骼机器人(图3(a)),定位于康复医疗、残疾人助力以及救灾等场合,采用电机驱动,并创新使用肌电信号获取人的运动意图.由以色列科学家研制成功的Rewalk[16]外骨骼机器人(图3(b))包含两类产品,分别是个人版和康复版.个人版能够让截瘫患者重新站立起来,因此强调针对单一病人量身设计,适合于在家庭和社区使用,康复版面向康复中心设计,能够提供步态康复训练.
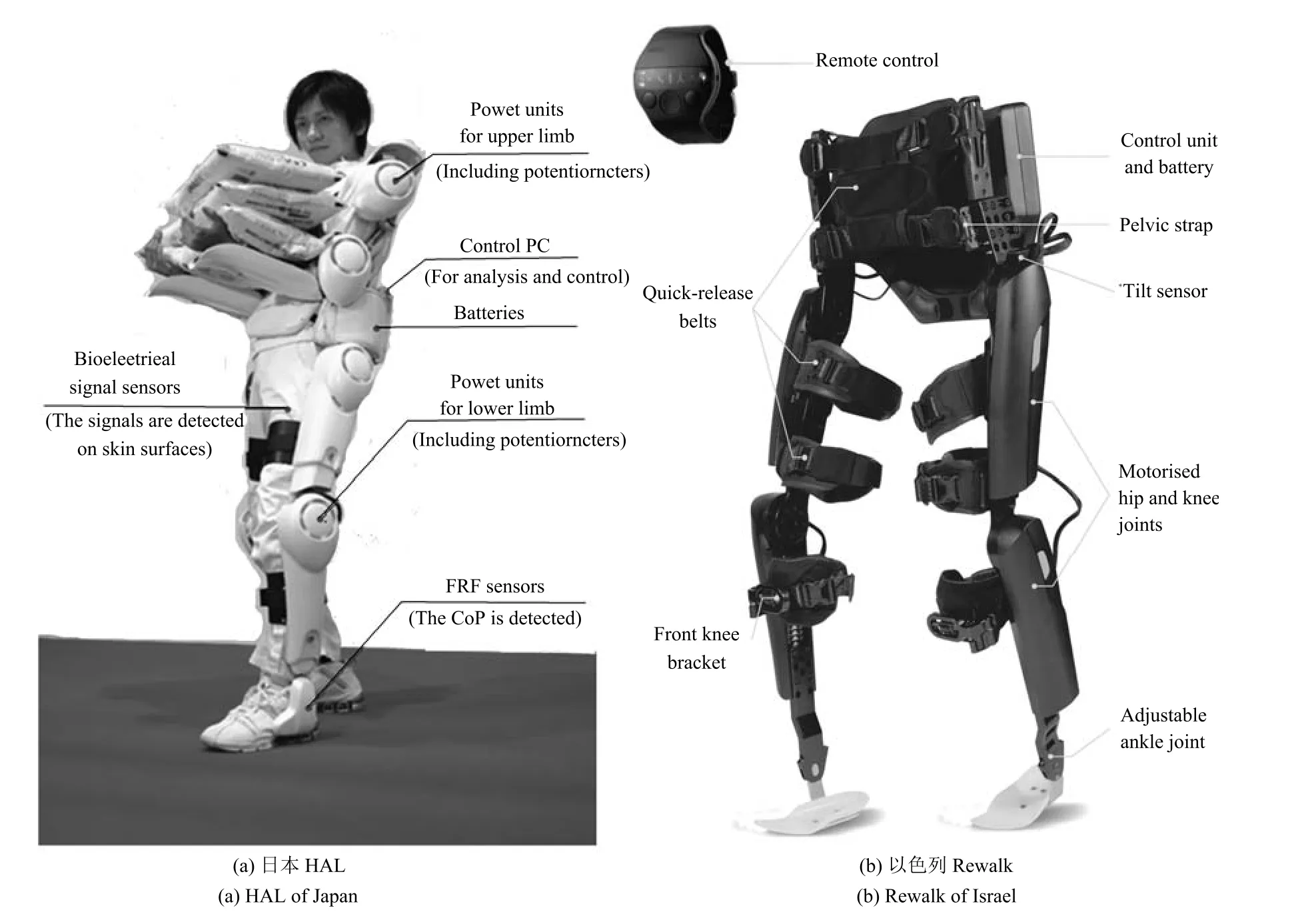
图3 外骨骼机器人Fig.3 Exoskeletal robots
上述外骨骼机器人普遍采用刚性结构和电机驱动,存在体积大、重量高、刚性强、穿戴不便等缺点,从而催生了柔性驱动的软体外骨骼机器人的出现.软体外骨骼通常采用气动驱动方式,重量轻,而气动驱动器本身可压缩,具有较高的柔顺性.哈佛大学Walsh团队[17],将气动人工肌肉固定在特制的外套上,对髋、膝、踝关节进行运动辅助,整个设备包含气源只有7.1kg,相比于电机驱动的刚性外骨骼要轻得多,并能够在驱动情况下显著减小人的平均代谢能量.在此研究基础上,该团队研制了一款新型的软性外骨骼Soft Exosuit[18],通过绳传动方式,将位于腰部的电机驱动沿着特殊编织而成的软性外衣传递到足跟,实现对用户的辅助(图4).其创新之处还在于设计了一种基于碳纤维织物的具有弹性的力传感器[19].与传统的刚性外骨骼相比,该设计的优势在于用户的关节活动不会受到外部刚性结构的限制,且整个设备质量很轻,从而减少外骨骼对用户的干涉,有助于实现更加自由灵活的交互.
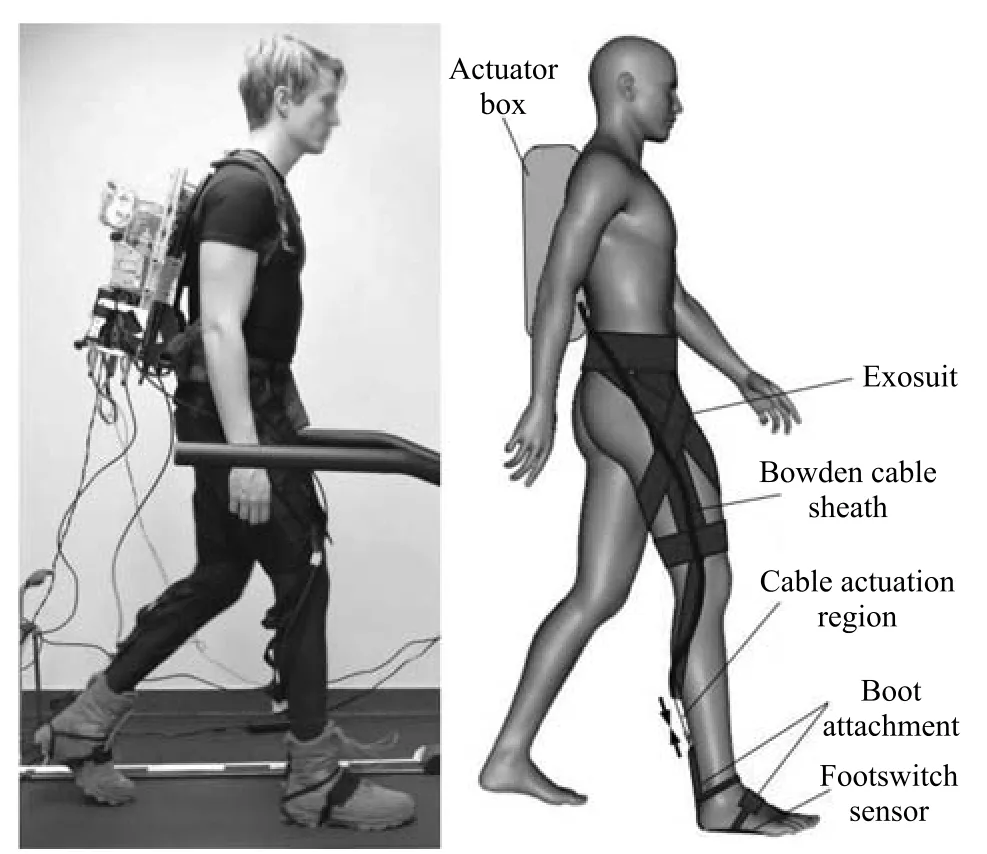
图4 美国哈佛大学研制的Soft Exosuits外骨骼机器人Fig.4 Soft Exosuits from Harvard University
1.3 智能假肢
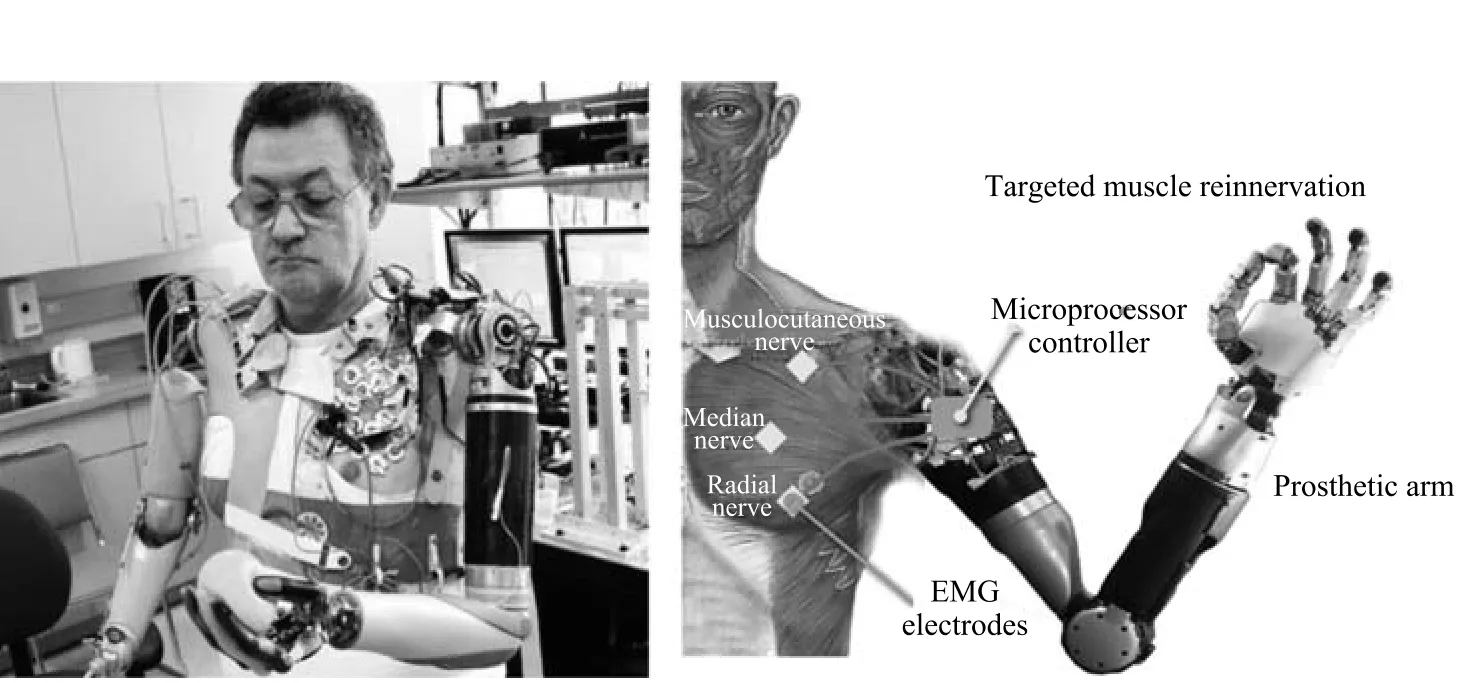
图5 基于TMR手术和表面肌电信号控制的动力型假肢Fig.5 Power prothesis controlled by sEMG signal via targeted muscle reinnervation
对于截肢患者,主要通过安装假肢完成其丧失的功能,实现生活自理.传统的机械式假肢舒适性差、自由度少、使用不便,影响患者的使用体验,且实现的功能有限.与之相比,动力型假肢具有较高的集成度,以及与人体类似的自由度和灵活性,但多自由度假肢的控制具有非常高的挑战性.目前,由肌电信号驱动的智能假肢控制方案是最有前景的解决方案,肌电信号与肢体的运动具有较高的相关性,早在1948年,德国的Reiter[20]研制成功了世界上第一只肌电控制的假手,利用残余肢体的肌电信号信息控制假手的开合.随着患者截肢程度越高,所需要代偿的自由度越多,其控制所需的信息越多,而残肢可供利用的控制信号也越少,因此传统的肌电假肢控制方法很难实现多自由度假肢的意念控制.
目前,结合肌肉神经功能重建手术和模式识别方法,有望解决多自由度假肢控制难题.靶向肌肉神经功能重建(Targeted muscle reinnervation,TMR)手术将残存神经转接到特定靶向肌肉中,从而重建因截肢失去的运动神经信息源.美国芝加哥康复研究中心Kuiken等[21]采用TMR手术,将上肢截肢者的残余臂丛神经植入同侧胸大肌,然后利用阵列电极实现对肌电信号的采集,最后通过特征提取、模式识别方法,实现对患者期望动作的识别,并控制假肢完成动作,首次实现了经肱骨截肢者以直觉控制多功能肌电假肢.中国科学院深圳先进技术研究院李光林团队[22]对TMR进行优化和改良,提出一种新的神经功能重建方法—目标神经功能替代术(Targeted nerve functional replacement,TNFR),并采用TMR方法与TNFR方法相结合的方式,首次在国内对经肱骨截肢者成功实施了神经功能重建术,建立了经肱骨截肢者神经功能重建模型,利用高密度电极采集因截肢而丧失的肌电信息,并通过LDA(Linear discriminant analysis)分类器对7类手部动作进行识别,分类精度达到95%以上,实现意念控制多功能肌电假肢的目的.

图6 仿生假肢与动力假肢Fig.6 Bionic prostheis and powered prosthesis
2006年,德国Otto Bock公司研发了世界上首款仿生智能假肢C-Leg[23](图6(a)),集成了控制器、电源模块、传感器、无线收发装置等,根据力矩传感器信息判断步态的支撑期与摆动期,通过控制器调节液压缸关节阻尼,保证稳定的行走,并实现能量的储存与释放.2014年,美国范德堡大学[24]研制了一款电动膝上假肢(图6(b)),安装有6轴IMU惯性传感器、编码器、膝关节力传感器等,膝关节和踝关节都有较强的反向驱动能力,通过对电机扭矩的控制,实现对不同刚度和阻尼特性的模拟.该假肢通过24V锂电池供电,能够以4.5km/h的速度连续行走6.75km.
2 康复辅助机器人的人体运动意图识别方法
意图识别,即机器人通过人体生理信息采集和分析,了解人的运动规划,进而更好地辅助其完成目标动作,包含意图测量和意图理解两个过程.
2.1 运动意图测量
人体运动控制(Human motor control)是一个非常复杂的过程,从运动规划到运动指令的下发,再到肌肉收缩,最后到关节运动和感觉反传,涉及到中枢神经系统、外周神经系统、肌肉骨骼系统等多个复杂子系统.人的运动意图产生于大脑,却贯穿于整个运动过程,隐含在不同的子系统中,因此可以在不同层面使用不同的手段进行测量.
人的运动意图与特定任务相关,尚无明确和统一的定义.最简单的意图可以是单个动作的开关或多个离散动作的切换,例如残疾人可以控制假手抓起水杯喝水,而假手的张合动作本身则由其控制器来自动完成[25];通过脑机接口(Brain machine interface,BMI)控制轮椅的前进、后退、左转、右转等动作[26];通过肌电假肢可以实现多自由度的复杂操作[27];穿戴式外骨骼机器人的控制也是根据用户运动意图,在站立、坐下、行走等不同种类的动作中进行选择[28].
人的运动意图也可以是连续信息,例如期望的运动轨迹、关节力或力矩等.例如人的上肢够取运动(Reaching motion)满足“最小急动度(Minimal jerk)”条件[29],最终得到一条空间中的直线路径和钟形速度曲线,则可以根据当前的位置和速度预测其期望的位移;而外骨骼机器人普遍将人机交互力或力矩作为人的运动意图,控制机器人运动.
如前所述,人的运动意图包含在不同的层面,因此有不同的体现形式,需要采用不同的手段进行检测.在中枢神经系统层面,可以采集脑电信号(Electroencephalogram,EEG),包括头皮脑电和植入式脑电两种;而在肌肉层面,可以采集肌电信号(Electromyography,EMG),根据电极侵入人体与否,分为表面肌电(Surface EMG,sEMG)和肌内肌电(Intramuscular EMG)两种[30−31],通过检测肌肉内部运动单元(Motor unit)的电势变化,可以反映肌肉激活程度,而且其时频信息与肌肉产生的力有较高的相关性.在骨骼关节层面,可以通过多自由度力/力矩传感器进行测量,包括3轴的交互力和3轴的交互扭矩,实现比较高的测量精度,但是成本比较高.目前比较流行的一种间接测量交互力/力矩的方式是串联弹性驱动(Serial elastic actuator,SEA)[32],将弹性元件与电机及减速器等驱动元件串联在一起,通过检测弹性元件的形变,计算得到关节扭矩或力.SEA设计能够以较低成本实现关节力或力矩的检测,并且由于弹性元件的加入,提高了关节本身的柔顺性和交互的安全性[33],因此在康复辅助机器人研究中受到越来越多的关注.
上述各种不同的测量手段有其各自不同的特点,需要根据实际情况选择合适的方案.头皮脑电可以通过用户佩戴电极帽,以非侵入的形式采集,对于截瘫、截肢等患者也适用,但是脑电信号容易受到噪声干扰[34],采集和处理过程对环境要求较高;而肌电信号的信噪比要高于脑电信号,但是仍然容易受到皮肤表面情况(汗液、毛发等)、运动伪差(Motion artifacts)、皮肤肌肉位移等因素的干扰[35−36];相对而言,力/力矩传感器信号的可靠性和精度更高,实际系统中应用也最多.但是,运动和力信息是人体运动意图的执行结果,缺少人体运动规划信息,而且在时间上相对脑电和肌电信号滞后,存在数十毫秒到数百毫秒的电机械延迟(Electromechanical delay)[37].因此,在设计实际系统时,需要根据这些检测手段各自的特点进行权衡,也可以将多种检测手段结合起来使用,提高检测精度和可靠性.
2.2 运动意图理解
在对人的生理信号进行采集之后,需要运用建模方法对信号进行处理,提取其中所包含的人体运动意图信息.如前所述,目前BMI应用以机器人的离散动作控制为主,根据脑电处理结果从若干种运动类型中进行选择,进而触发假肢、轮椅、外骨骼相应的动作,常用的动作分类方法包括LDA,SVM(Support vector machines)等.肌电信号与肌肉收缩产生的力有较高的相关性,并通过肢体的动力学影响最终的运动,所以肌电信号的建模方法通常有模式分类和连续模型两种,前者通过多通道肌电信号的特征提取和模式分类,实现对假肢不同动作的控制,常用的特征包括时频特征、小波变换、AR模型等[38−39],分类方法包括LDA,SVM,神经网络等[40].通过模式识别的方法,肌电信号只用于区分有限种类的离散动作,而每个动作的执行可以由机器人自动完成,从而减小了噪声对最终控制结果的影响,在智能假肢控制中得到广泛应用.
康复机器人等应用通常要求对整个人机交互过程进行调节,因此将肌电信号与连续的运动或力/力矩进行对应更加适用,即要建立两者之间的动态模型.一种方法被称作EMG驱动的神经肌肉骨骼模型(EMG-driven musculoskeletal model)[41],将肌电信号作为神经激活度的表征,输入到Hill肌肉模型,结合肌肉动力学、肌腱模型、肌肉力臂几何关系等,计算得到输出关节力矩.而当运动涉及到多块肌肉时,该方法得到的模型非常复杂,而且存在很多与个体相关的未知参数.Buchanan等[42]首先根据人体测量学统计信息对未知参数进行估计,得到一个近似模型,然后根据实际样本在近似模型的基础上进行参数的辨识.而由于肢体惯量和关节弹性等因素的影响,人在随意运动下的关节力矩无法直接测量,从而无法得到用于参数辨识的训练样本.Lloyd等[43]在实验中,结合运动学信息(位置、速度、角速度)和肢体逆动力学模型,估计得到关节扭矩训练样本,然后使用最小二乘法对模型参数进行辨识.另一种方法是黑箱模型,只考虑输入输出关系,如Kiguchi等[44]采用自适应神经模糊控制器建立EMG幅值信号与患者估计力矩之间的关系,使用误差反传学习算法调整权值矩阵,同时考虑到肢体姿态对于EMG采集的影响,将关节角度也作为控制器的输入.在HAL机器人[45]控制中,为得到人体髋关节和膝关节的主动关节扭矩,通过将收缩肌和拮抗肌的肌电信号加权相减来估计,而权值则利用最小二乘法根据实际关节扭矩来进行辨识.文献[46]使用自适应振荡器算法从节律性变化的肌电信号中获取人重复运动的频率和相位变化,然后结合最小急动度条件,在线生成与人运动意图同步的机器人参考轨迹.
3 康复辅助机器人的人机交互控制方法
在获取人的运动意图之后,需要根据人的运动意图进行机器人控制.在康复辅助机器人应用领域,根据人与机器人在人机交互中角色的不同,主要有主从控制模式和协作学习模式两类不同交互模式.在主从控制模式下,由人来完成运动的规划和指令的下达,而由机器人完成运动任务的执行,机器人相当于人体运动功能的代偿或增强.而在协作学习模式下,人机协作完成目标任务,机器人负责减小由人引起的控制误差,同时还要尽量鼓励人的参与,起到引导学习的目的.而随着人的运动能力的提高,机器人逐步减少对人的干预,让人更大程度地独立完成任务,实现运动学习和功能康复的目标.
3.1 主从控制模式的人机交互控制
主从控制模式适用于智能假肢、穿戴式外骨骼、智能轮椅等应用.如前所述,通过采集肌电信号和运用模式识别方法,可以对期望的动作类型进行识别,然后由机器人执行相应的动作.机器人的运动模式可以通过编程事先确定,以固定的速度轨迹完成动作.而为了让动作执行过程更加自然平滑,并能够接受人的控制,Yatsenko等[47]在假肢执行某类动作时,采用比例控制的方式,根据肌电信号的幅值大小,调节假肢的运动速度.得益于人脑的自适应学习能力,用户可以较快地学会对机器人的控制[48],但是对人来说,这种简单的比例控制方法显然不够自然,并影响其正常的运动控制.
对于穿戴式外骨骼等应用,机器人控制变量通常是位置,在测量或估计得到人机交互力后,可以将其转化为期望的运动轨迹.Ge等[49]将人的运动控制策略假设成质量–弹簧–阻尼形式的线性阻抗,则人的目标位置为弹簧的平衡位置.阻抗控制在机器人中的应用首先由Hogan[50]提出,是机器人刚度控制的扩展.阻抗控制方法针对机器人与环境交互任务,使用质量、阻尼、弹簧等阻抗模型来刻画交互接口的作用力和运动结果之间的动态特性.阻抗控制有两种实现形式,一种根据运动偏差检测来控制机器人输出力,适用于具有较强反向驱动能力的机构,广泛应用于力反馈设备中,MIT-Manus上肢康复机器人也是采用的阻抗控制方法;另一种实现形式是检测交互力来控制机器人位置与弹簧平衡位置之间的偏差,也被称作导纳控制或基于位置的阻抗控制.对于大多数机器人,位置伺服更容易实现,因此基于位置的阻抗控制得到广泛应用.
动力型膝上假肢控制中常用一种称为有限状态阻抗(Finite state impedance,FSI)控制[51]的方法.FSI控制基于当前的步态相位调整假肢关节的阻抗,以模拟正常人体膝关节在运动中的动力学特性.一个完整的步态周期可以划分为不同的步态的相位,用有限状态机来进行描述,而电动膝关节的动力学特性通常使用弹簧–阻尼系统进行建模,其阻抗参数随着步态相位而变化.在控制中,步态相位状态的切换通常根据足底压力和最大膝关节角度等来确定.
在增强型外骨骼等应用场合,用户与机器人共同完成任务,用户也有能量输出,希望通过控制外骨骼最大程度地节省人的体力.Modares等[52]提出一种新的人机交互策略,采用最优控制框架,将目标任务转化为寻找机器人最优阻抗参数的LQR问题,其中性能指标定义为关于跟踪误差和患者主动力的二次型,通过强化学习方法,最小化人的主动力和跟踪误差.在下假肢控制上,Wen等[53]提出一种基于自适应动态规划的控制框架,动态地自动调整膝关节的阻抗参数,实现平衡步态.
3.2 协作学习模式的人机交互控制
对于神经康复应用,机器人协助患者完成目标任务,同时引导患者重新学习正常的运动模式,实现神经康复的目标,人与机器人之间是一种协作学习关系.
机器人辅助神经康复的作用机理是基于脑可塑性[54]和人体的运动学习[55]理论,通过重复运动和反馈刺激,使患者重新学会前馈和反馈运动控制,促进脑功能重组和代偿,实现运动功能的改善和恢复[56].因此,康复机器人需要提供对运动回路的重复刺激和增强反馈,同时引导患者的主动参与和积极训练.由于沉浸感、趣味性、可编程等优势,虚拟现实系统已经成为康复机器人的重要组成部分,结合机器人的运动辅助功能实现康复训练的目标[57].
机器人辅助训练的目标是实现最大程度的神经康复,因此训练策略和机器人控制方法是最受关注的焦点.总体来说,康复训练策略分为主动和被动两种[58−59],被动训练针对卒中早期以及重症患者,由机器人带动患者进行重复运动,实现保持关节活动度、促进血液循环、防止肌肉萎缩等目的,而对其自身运动控制功能的提升作用较小.目前临床上使用较多的CPM(Continuous passive motion)设备,就工作在被动训练模式.主动训练则强调由患者主导康复训练过程,机器人根据患者的运动意图和实际表现实时调整辅助力或运动轨迹.一方面通过机器人引导来纠正其错误的运动模式,另一方面通过机器人辅助来补偿其运动能力的不足,完成训练任务.由于主动训练由患者主动触发和调整,对运动神经系统具有更强的刺激,因此主动训练比康复训练对于神经康复具有更好的效果,临床研究也证明了这一点[60].
对于机器人来说,被动康复训练是典型的轨迹跟踪任务,实现起来比较容易,无论是通过简单的重力补偿的PD控制,还是基于模型的自适应控制,都与普通机械臂控制类似.同时为了保证安全性,需要增加痉挛检测和紧急制动等机制.相对而言,主动康复实现起来难度比较大,一方面在于如何准确获取患者的主动运动意图,另一方面在于如何提供适当的辅助力.
如果机器人辅助过多,则患者过度依赖机器人,产生懈怠;而如果机器人辅助不足,则对患者的挑战性过大,甚至无法完成任务,从而打击患者训练的积极性.因此,机器人的辅助策略应当符合按需辅助(Assist-as-needed)的原则,即尽可能让患者利用其参与能力完成任务,而机器人仅在必要时间提供必要的辅助力[61].由于个体以及病情差异,人体肌肉骨骼系统的复杂性和人体主动输出的随机性导致很难对人体的运动能力和动力学进行准确的建模,难以实现最优的辅助.
为实现按需辅助的目标,避免机器人的过度干预,很多研究都采用虚拟通道(Virtual tunnel)[11,62−63]技术.Cai等[62]利用阻抗控制,在期望运动轨迹不同方向上构造不均匀的力场.在法线方向上,设置偏移误差的阈值,构成一个沿期望运动轨迹的虚拟通道,患者在通道内部可以自由运动,而不受机器人的干预,只有在偏移过大超出阈值接触到“弹性墙”时才受到机器人的纠正力,而力的大小由“墙”的刚度决定;在前进方向上,设置最小速度阈值[63],只有当患者运动过慢时,才由机器人根据运动误差提供患者一定的助力.虚拟通道在空间和速度上设置阈值,只有触发阈值时才由机器人进行辅助,在一定程度上避免了机器人的过度干预.但是由于缺乏对患者自身运动能力的考虑,并不是一种最优的实现手段,而阈值本身的设置也是比较难以确定的.
为了更好地根据患者需求控制康复机器人的辅助力,需要对患者的实际运动能力进行在线评估,仅由机器人提供必要的辅助力.Wolbrecht等[64]在基本的机器人自适应控制器的基础上,通过径向基函数(Radial basis function,RBF)神经网络对患者的运动能力进行建模,并且RBF神经网络只与空间位置相关,均匀分布在机器人的工作空间,而RBF神经网络的幅值根据运动误差进行自适应的调整.在标准的参数调节率基础上,增加了一个包含遗忘因子的调节项,即当机器人辅助力较大而误差较小时,逐步减小机器人的辅助力,避免患者因为机器人的过度干预而懈怠,从而实现按需辅助的目标.该方法的优势是不需要对人机系统进行建模,易于实现,缺点是假设人的输出只与位置相关,因此只适用于特定轨迹的任务.与之类似,Pehlivan等[65]也利用RBF神经网络对患者的运动能力进行建模,不同之处在于其只采用标准的参数调节率.通过证明,该控制器能够实现跟踪误差一致最终有界,而误差边界与反馈增益矩阵成反比.因此,根据当前误差,设计反馈增益矩阵调节率,改变容许误差阈值,从而避免机器人过度辅助,实现按需辅助的目标.该方法的优势在于其调节率直接影响最大跟踪误差,更加直观和便于调节.
4 康复辅助机器人未来趋势展望
4.1 优化机器人的柔顺性设计
由于康复辅助机器人与人直接物理接触,机器人的安全性和人的舒适体验非常重要.除了通过机器人柔顺控制,机器人本体设计也要具有一定的柔顺性,以保证人的绝对安全和柔顺交互,提高人机相容性.受限于机器人结构复杂度、重量要求、驱动方式、控制难度、制造成本等因素影响,目前的康复辅助机器人自由度低、体积大、重量高、柔顺性差,安全性和交互体验不尽如人意.未来,一方面要在机器人的仿人设计上取得突破,模拟人体自由度,提高运动灵活性,发展串联弹性驱动、变刚度驱动等柔顺驱动方式;另一方面,发展软体材料、柔性结构、气动驱动等技术将具有广阔的应用前景,而由于具有较强的非线性,增加了控制器设计的难度,同时要解决气源、噪声等应用中实际问题.未来可仿照人体的肌肉骨骼系统,结合刚性机器人和柔性机器人的优势,实现刚柔并济,提高人机相容性.
4.2 提高人体运动意图识别效果
如前所述,人体运动意图识别对于康复机器人主动训练,辅助外骨骼和智能假肢的运动控制至关重要,直接影响用户的自然操作感受和康复辅助效果,因此提高人体运动意图识别精度和可靠性具有重要研究价值.提高人体运动意图的识别效果一方面在于生理信息检测技术的发展,另一方面在于意图理解模型的创新.未来,随着生理信号传感技术的不断发展,脑电、肌电、近红外光谱、肌肉超声以及其他新型检测技术将提供更高质量的信号,提供更丰富的人体生理信息.同时,随着信号处理、模式识别、机器学习、人工智能技术的不断进步,将逐步加深对隐含在生理信号中的人体运动意图的理解,提高解码精度和可靠性.未来人体运动意图识别技术的突破将大幅提升康复辅助机器人的研究水平和应用前景.
4.3 发展数据驱动的机器人控制
目前,物理人机交互控制的一大挑战来自对于人体运动能力和行为的准确建模.首先,人的行为具有较强的随机性,难以准确建模和预测,这一方面有望随着人体运动意图识别方法的突破而得到解决.随着检测技术和大数据分析技术的进步,通过大量采集人的脑电信号、肌电信号、运动学及动力学信号等多模态信息,并结合运动任务的自身特点,利用大数据分析和深度学习等方法,实现对人体的运动模式进行准确建模和预测.其次,人体神经肌肉骨骼系统具有高度复杂性,现在普遍采用基于Hill肌肉模型的方法,模型精度有待提高,而且最终模型中大量与个体相关的生理参数难易获得,而基于神经网络等黑箱模型的方法难以避免过拟合的风险,可靠性差.未来,需要对现有模型进行改进,增加肌肉疲劳、共同收缩、关节黏弹性等特性,利用OpenSim等平台对神经肌肉骨骼系统进行建模和模拟,并随着数据的获取不断地优化修正,最终提高模型的精度,并减小计算负担,以便于嵌入到机器人控制系统中.最后,人机交互是一种相互学习、相互适应的过程,可以利用人机交互数据对人的学习过程进行建模,预测机器人控制对于用户行为的影响,设计机器人的控制方法,加快人与机器人的相互适应,提高交互效率和效果.
4.4 创新多模态的人体感觉反馈
人体运动控制离不开感觉器官提供的反馈信息,最重要的如视觉、听觉、触觉、本体感觉等,因此虚拟现实技术在人机交互中得到广泛应用.对于康复辅助机器人应用,因为有物理人机交互,存在力和运动的动态因果关系,触觉反馈的利用价值更大.感觉正常的人可以通过皮肤和肌肉触力觉去感受与环境的交互特性,而对于残疾人或肢体感觉损伤的患者,无法通过自身肢体去感受触觉信息,影响人机交互的效果.目前通常更多的依靠增强视觉或听觉反馈,例如将肌电信号转化为曲线图像或声音反馈给人,或将实际误差进行视觉放大或扭曲,实现对反馈过程的干预,还有通过刺激身体其他部位来反馈触觉信息.这些手段可以组合起来使用,让使用者更好地感知自身以及机器人的运动状态,提高人机相容性.但是,这些感觉代偿或转移的方法永远无法代替人的自然感受,未来随着神经工程的发展,可以通过感觉神经刺激实现对人体感觉反馈通路的干预,将触觉信息通过机器人传递到感觉神经,或直接刺激大脑模拟触觉感受.总之,未来多模态人体感觉反馈的进步,将大幅提高康复辅助机器人的临床实用性和使用效果.
5 结束语
综上所述,康复辅助机器人在辅助神经损伤患者、老年人、残疾人进行神经康复和日常辅助中具有广阔的应用前景,也是最有挑战性的机器人研究领域之一.近30年来,康复辅助机器人逐步从实验室研究走向临床应用,产生了一大批各具特色的神经康复机器人、穿戴式外骨骼、智能假肢等康复辅助系统,极大促进了该领域的研究水平和应用水平.由于人与机器人存在直接物理接触,机器人与人之间的物理人机交互控制是影响交互性能的关键,而人体运动意图识别和人机交互控制策略是两项研究重点和核心技术.未来研究将朝着优化机器人的柔顺性设计、提高人体运动意图识别效果、发展数据驱动的机器人控制以及创新多模态的人体感觉反馈技术等方向发展,最终提升机器人的康复服务水平.
