行星轮栽植机构优化设计与试验
2018-12-04胡建平张晨迪张思伟费卫征潘浩然
胡建平 潘 杰 张晨迪 张思伟 费卫征 潘浩然
(江苏大学现代农业装备与技术教育部重点实验室, 镇江 212013)
0 引言
蔬菜生产是一项劳动密集型产业,人工劳动强度大,制约了蔬菜产业的发展。蔬菜育苗移栽是蔬菜生产的主要方式,实现蔬菜自动化移栽已成为农业生产的迫切需求和未来发展的必然趋势[1-2]。栽植机构是自动移栽机的核心工作部件之一,不论是由人工将苗钵投入栽植嘴进行移栽作业的半自动移栽机械,还是能同时自动完成取苗和植苗动作的全自动移栽机械,均需要一套栽植机构来完成最终的植苗动作。作为将穴盘苗植入大田的直接作业机构,栽植机构的性能直接决定着穴盘苗的移栽立苗率和移栽机整机性能[3-4]。
常见的栽植机构有钳夹式、挠性圆盘式、导苗管式、吊篮式、鸭嘴式等。钳夹式、挠性圆盘式、导苗管式需配合开沟器使用,与我国蔬菜起垄种植的农艺要求不符[5]。吊篮式和鸭嘴式可直接进行垄上打穴移栽,但吊篮式栽植机构结构复杂,体积庞大,多用于国外大型农场[6]。
日本的洋马公司最早研制出行星轮-滑道式栽植机构,作业时鸭嘴在行星轮系和滑道的共同作用下,按照设计的轨迹和姿态打穴移栽,将钵苗植入土中。该栽植机构受滑道限制,只能安装一个栽植器,且行星轮的转速不能过快,限制了该栽植机构的作业效率[7]。胡建平等[8-9]提出一种行星轮多转臂式栽植机构,以行星轮单转臂为对象,仿真分析了在不同特征参数λ下的前、后鸭嘴末端运动轨迹及钵苗栽植状态,得到了钵苗直立度较好的λ值,但未对栽植机构主要参数进行优化。金鑫等[10]以钵苗栽植过程中位于栽植器内的运动阶段为优化目标,对钵苗运动过程动力学模型进行优化,得出了栽植器最佳初始位置及结构参数,但未对栽植轨迹进行优化。俞高红等[11]设计了行星轮系旋转式栽植机构,构建了一种能够满足大株距移栽作业轨迹的非圆齿轮传动比函数,通过人机交互方法优化出一组符合要求的较优机构参数,但其仅针对单一株距。
针对不同作物移栽时的不同株距问题,本文在前期研究基础上,以行星轮转臂式栽植机构为研究对象,建立栽植机构的运动学模型。通过对栽植机构前后栽植点轨迹的理论研究,由计算机辅助分析进行机构参数优化,得出一组能够适用于自走式多行移栽机、满足多株距移栽要求的栽植机构参数。并进行田间植苗验证试验,以改善行星轮转臂式栽植机构栽植性能,提高其适用性及通用性。
1 移栽机栽植机构结构与工作原理
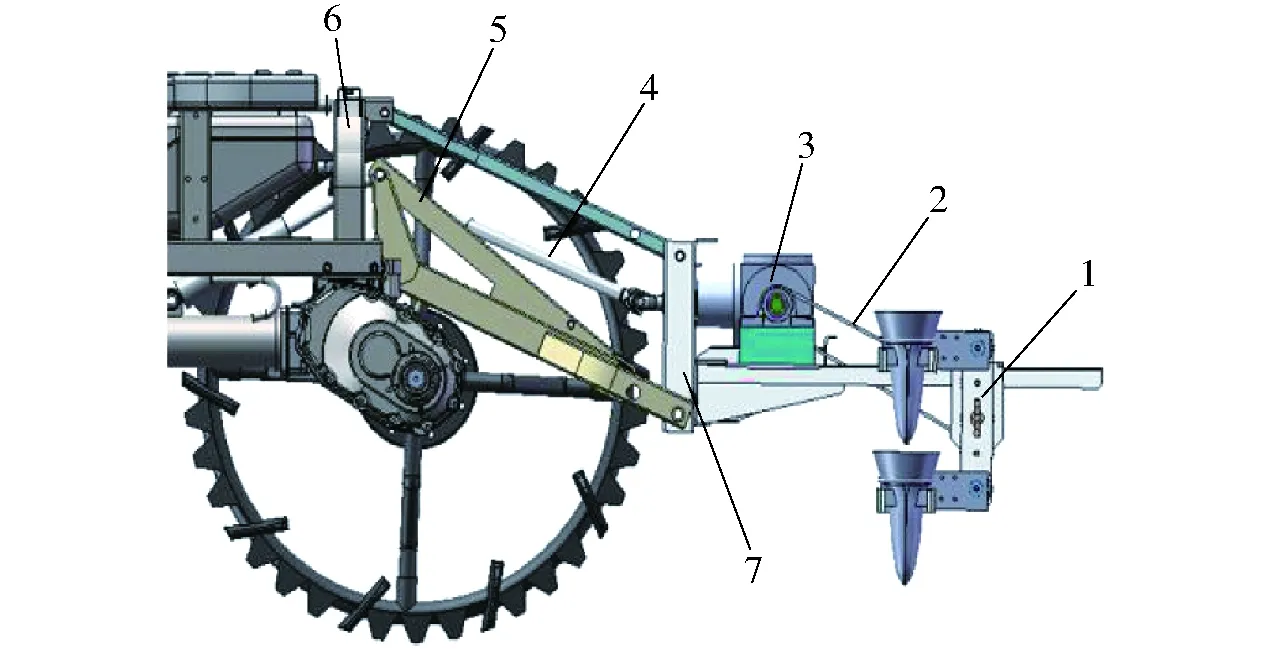
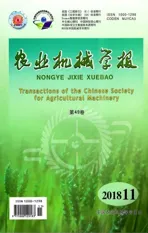
图1 栽植部件传动方案Fig.1 Transmission method of planting device1.栽植单体 2.链传动机构 3.T型减速机 4.底盘动力输出轴 5.液压提升装置 6.底盘架 7.栽植支架
自走式移栽机行星轮转臂式栽植机构的动力传输如图1所示。主要由底盘动力输出轴、T型减速机、链传动机构等组成;作业时,栽植机构随移栽机整体向前运动,底盘发动机动力由动力输出轴经T型减速机由链传动机构传递至栽植单体带动栽植机构转动,带动栽植鸭嘴在土里打穴移栽,将穴盘苗植入田中。
每组栽植单体可实现两行蔬菜移栽,通过组合栽植单体可实现多行作业;底盘液压提升装置可以实现栽植部件升降,可根据垄高调节栽植部件整体高度以保证移栽深度,使移栽机能够适应不同垄高及平地移栽。
行星轮转臂式栽植机构结构如图2所示,主要由行星轮转臂平动机构和鸭嘴开合机构2部分组成。行星轮转臂平动机构主要包括行星轮驱动部件、行星架和栽植臂,其中行星轮驱动部件由一个中心轮、两组对称的惰轮和行星轮组成;鸭嘴开合机构主要包括鸭嘴式栽植器、凸轮、顶杆、滑槽、后转板和前转板,其中鸭嘴式栽植器由前鸭嘴、后鸭嘴、前鸭嘴固定板、后鸭嘴固定板、接苗斗和拉簧组成。
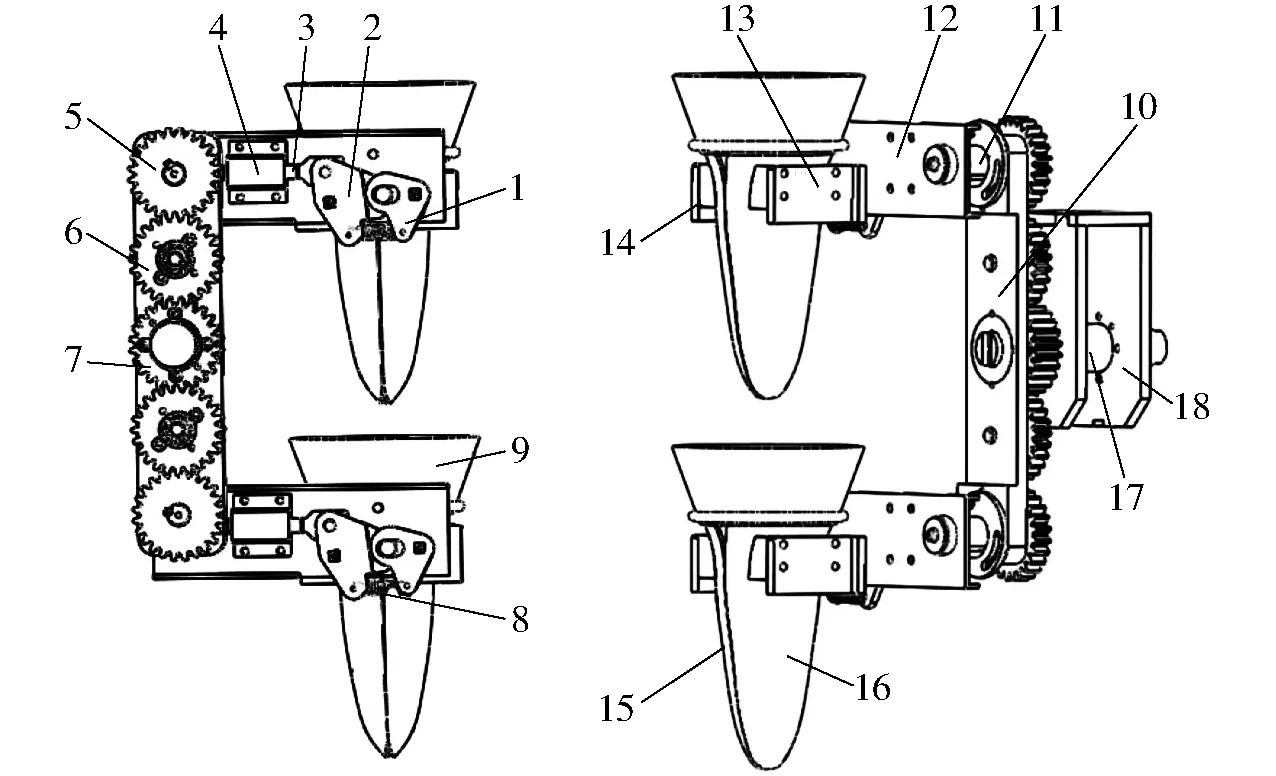
图2 栽植机构结构图Fig.2 Structure diagram of planting mechanism1.前转板 2.后转板 3.顶杆 4.滑槽 5.行星轮 6.惰轮 7.中心轮 8.拉簧 9.接苗斗 10.行星架 11.凸轮 12.栽植臂 13.后鸭嘴固定板 14.前鸭嘴固定板 15.前鸭嘴 16.后鸭嘴 17.中心轮轴 18.固定架

图3 栽植机构作业过程Fig.3 Working process of planting mechanism
作业时,栽植机构随移栽机整体向前运动,底盘动力经分动箱由链传动传递至从动链轮的中心轮轴带动行星架转动,带动惰轮和行星轮啮合转动,惰轮与中心轮轴同向转动,行星轮反向转动。作业过程如图3所示,由于齿轮啮合作用,行星轮带动安装在其转轴上的栽植臂一起绕中心轮中心转动,且栽植臂始终保持水平;行星架带动凸轮绕其旋转中心转动,与顶杆挤压碰撞推动顶杆按一定运动规律移动,进而推动后转板带动后鸭嘴转动,后转板推动前转板带动前鸭嘴转动,实现鸭嘴的打开动作,且鸭嘴打开时,前后鸭嘴末端应位于同一水平线,拉簧的弹力保证顶杆和凸轮始终接触,实现鸭嘴的闭合回位。如此循环动作,实现鸭嘴的循环开合,完成鸭嘴栽植器打穴、移栽作业。
2 行星轮转臂式栽植机构运动学模型
2.1 理论模型
由于栽植机构两组转臂的结构及运动规律相同,因此取其中一组转臂进行建模分析。由栽植机构结构原理可知,其由行星轮转臂平动机构和鸭嘴开合机构两部分组成,其机构简图如图4所示。
图4 栽植机构简图Fig.4 Schematics of planting mechanism
图4a为行星轮转臂平动机构简图,A为以中心轮中心为原点的坐标系,其固连在固定架上,随底盘向前运动;B为以行星轮中心为原点的坐标系,其整体绕A旋转,行星架AB为原动件。图4b为鸭嘴开合机构简图,即B坐标系图,凸轮固接于行星架上随其转动;C点为后鸭嘴转轴中心,D点为前鸭嘴转轴中心;E、F为前、后两转板铰接点位置,将其与后鸭嘴转轴C点间关系简化为杆CE、CF,P、Q为前后鸭嘴栽植点[12-13]。
当移栽机向前行驶时,底盘动力由链传动带动行星架AB顺时针转动,带动鸭嘴开合机构即B坐标系整体绕A坐标系转动;凸轮随行星架AB转动角度φ后产生推程推动顶杆FG平动,从而推动后鸭嘴部件ECFQ绕C点转动,进而在E点滑槽作用下带动前鸭嘴部件EDP绕D点转动,使前后鸭嘴两栽植点P、Q作开合运动,完成栽植动作。
2.2 运动数学模型
如图4,以中心轮中心为原点建立A坐标系,以行星轮中心为原点建立B坐标系,移栽机前进方向与x轴正向相同。令xB表示参数在B坐标系中的x方向分量表达式,yB表示参数在B坐标系中的y方向分量表达式,通过建立栽植器前后鸭嘴栽植点P、Q运动数学模型,来优化栽植机构结构参数。在B坐标系中,当前后鸭嘴CQ、DP位于初始位置时,Q、P重合,可求得
(1)
式中θo1——初始位置后鸭嘴CQ与竖直线夹角,(°)
θo2——初始位置前鸭嘴DP与竖直线夹角,(°)
xBH——前后鸭嘴闭合时的重合点H位于xB轴上的坐标值
xBC——C点位于xB轴上的坐标值
xBD——D点位于xB轴上的坐标值
L4——后鸭嘴末端点至后鸭嘴转轴中心的距离,mm
L5——前鸭嘴末端点至前鸭嘴转轴中心的距离,mm
为使栽植点位于栽植器中间,则XBH为XBCXBD中点,可求得
(2)
可求得
(3)
当行星架AB转动使凸轮顶杆推动ECFQ转动θ1角至E′CF′Q′位置、EDP转动θ2角至E′DP′位置时,由
(4)
式中α——初始位置CF与水平线夹角,(°)
s(φ)——滚子G的运动规律与某时刻行星架转过的角位移φ的关系函数
L1——FG的长度,mm
L2——CF的长度,mm
可求得
(5)
由LCE=LCE′=L3(LCE、LCE′表示CE、CE′的长度),可求得
(6)
式中LEE′——EE′的长度,mm
E点的位移坐标方程为
(7)
式中xBE——E点位于xB轴上的坐标值
yBE——E点位于yB轴上的坐标值
β——初始位置CE与水平线夹角,(°)
E′点的位移坐标方程为
(8)
式中xBE′——E′点位于xB轴上的坐标值
yBE′——E′点位于yB轴上的坐标值
由式(7)、(8)可求得EE′的长度,由D点坐标(xBD,yBD)可求得DE、DE′的长度LDE、LDE′。
由公式
(9)
可求得
(10)
则P点在B坐标系中的位移坐标方程为
(11)
式中xBP——P点位于xB轴上的坐标值
yBP——P点位于yB轴上的坐标值
Q点在B坐标系中的位移坐标方程为
(12)
式中xBQ——Q点位于xB轴上的坐标值
yBQ——Q点位于yB轴上的坐标值
若移栽机前进速度为ve,行星架旋转角速度为ωd,则B点的绝对运动轨迹方程为
(13)
式中xB——B点位于x轴上的坐标值
yB——B点位于y轴上的坐标值
Rd——行星架旋转半径,即行星轮与中心轮旋转中心的距离,mm
则前后鸭嘴栽植点P、Q的绝对运动轨迹方程为
(14)
(15)
根据以上几何关系及P、Q点轨迹方程,利用Matlab对该数学模型进行编程,建立其分析程序模型,将一个运动周期分解为若干个时刻点,求解出前后鸭嘴栽植点(P、Q)在每个时刻点的坐标值,拟合为运动轨迹曲线输出,并用图形表示出来。
3 主要参数对栽植机构运动特性影响分析
根据所建立数学模型,基于Matlab GUI设计了计算机辅助优化设计人机交互界面,如图5所示。该界面主要包括凸轮滚子运动规律调入区、参数初值输入区、轨迹分析区、运动轨迹区、轨迹对比区、实时参数返回区和参数组合寄存区等。该优化设计界面通过可视化设计,将行星轮转臂式栽植机构前后鸭嘴栽植点的运动轨迹实时展现在设计者面前[14-16],综合考虑几何关系及布置空间,以栽植机构Rd、L3、β、L4为变量参数。结合钵苗叶冠直径及实际作业工况,初选一组结构参数L1=83 mm,L2=22 mm,L3=38 mm,L4=145 mm,Rd=120 mm,α=82°,β=8°,C(105,-22),D(165,-17),分别在3个适应于大多数蔬菜的株距下,分析变量参数对栽植轨迹的影响趋势,由此通过人机交互逐步调节设计参数,使栽植轨迹达到作业要求[17-18]。

图5 辅助优化工具人机交互界面Fig.5 Human-computer interaction interface
3.1 行星架旋转半径Rd对栽植轨迹的影响
对比图6中的栽植轨迹可以看出,特征参数λ一定时,随着行星架旋转半径Rd的增大,后鸭嘴形成的环扣形状变大,后鸭嘴避苗空间变大,且前鸭嘴轨迹向环扣靠拢,前鸭嘴的避苗空间减小;前后鸭嘴轨迹与垄面交点尺寸变化不大,对轨迹形成的穴口影响不大;随着Rd的增大,栽植轨迹逐渐向下向右偏移,栽植深度逐渐增大。在保证栽植深度一定时,Rd越小则轨迹轮廓高度越小,且实际作业时支架距垄面过低会在垄面上推土。综上分析,行星架旋转半径Rd尺寸的选取需要充分考虑栽植鸭嘴尺寸、前后避苗空间和实际作业安装位置的需求。
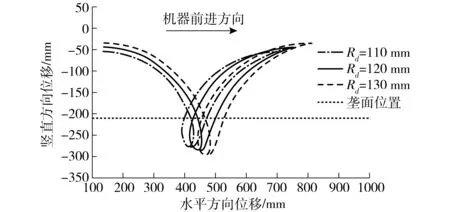
图6 行星架旋转半径与栽植轨迹的关系Fig.6 Relationship between radius of rotation of planet frame (Rd) and planting trajectory
3.2 后鸭嘴摆杆CE长度L3对栽植轨迹的影响
在中间株距310 mm下分析CE长度L3对栽植轨迹的影响,如图7所示。移栽频率f为60株/min(即ωd=π rad/s)时,行走速度ve=310 mm/s,其他结构及位置参数选定为:L1=83 mm,L2=22 mm,L4=145 mm,Rd=120 mm,α=82°,β=8°,C(105,-22),D(165,-17)。
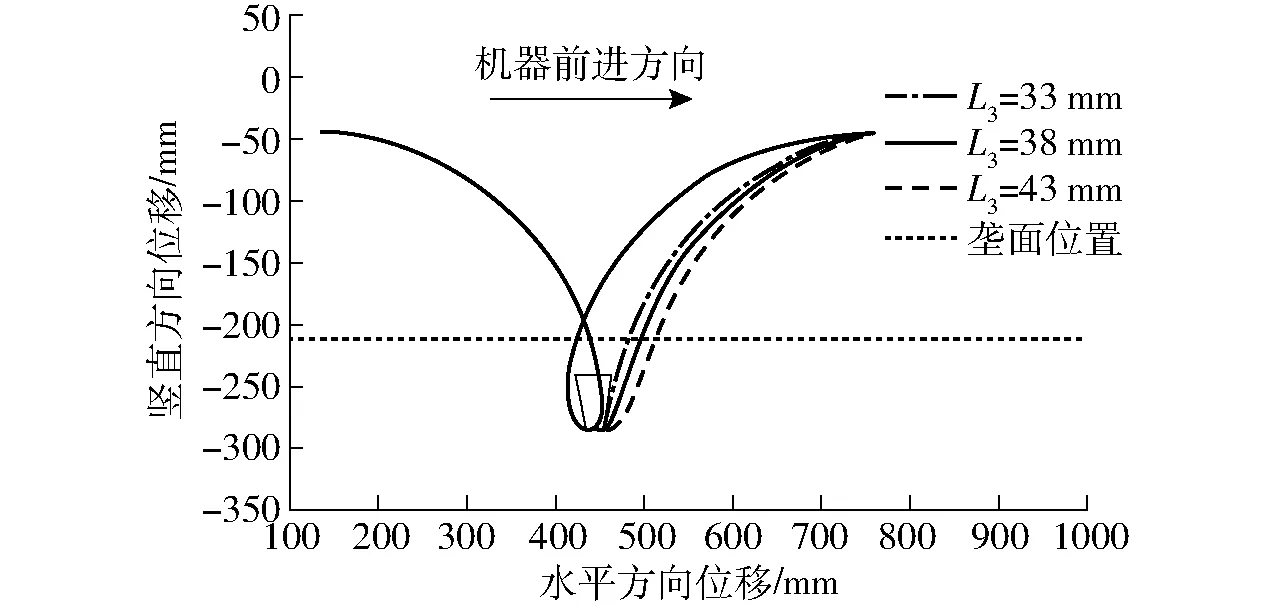
图7 CE长度与栽植轨迹的关系Fig.7 Relationship between length of CE (L3) and planting trajectory
对比图7中的栽植轨迹可以看出,随着L3的增大,前鸭嘴的运动开合幅度增大,即前鸭嘴的避苗空间增大,可通过适当增大L3来消除由前鸭嘴避苗空间不足导致前鸭嘴对苗钵的挂带现象;但随着L3的增大,前后鸭嘴轨迹在垄面处形成的穴口尺寸增大,因此在满足前鸭嘴避苗空间的前提下,L3的取值应尽量小。综上分析,L3的变化主要影响前鸭嘴的运动轨迹,对后鸭嘴运动所形成的环扣形状没有影响,L3的选取应充分考虑前鸭嘴避苗空间和穴口尺寸的大小。
3.3 CE初始位置与水平线夹角β对栽植轨迹的影响
在中间株距310 mm下分析CE初始位置与水平线夹角β对栽植轨迹的影响,如图8所示。移栽频率f为60株/min(即ωd=π rad/s)时,行走速度ve=310 mm/s,其他结构及位置参数选定为:L1=83 mm,L2=22 mm,L3=38 mm,L4=145 mm,Rd=120 mm,α=82°,C(105,-22),D(165,-17)。
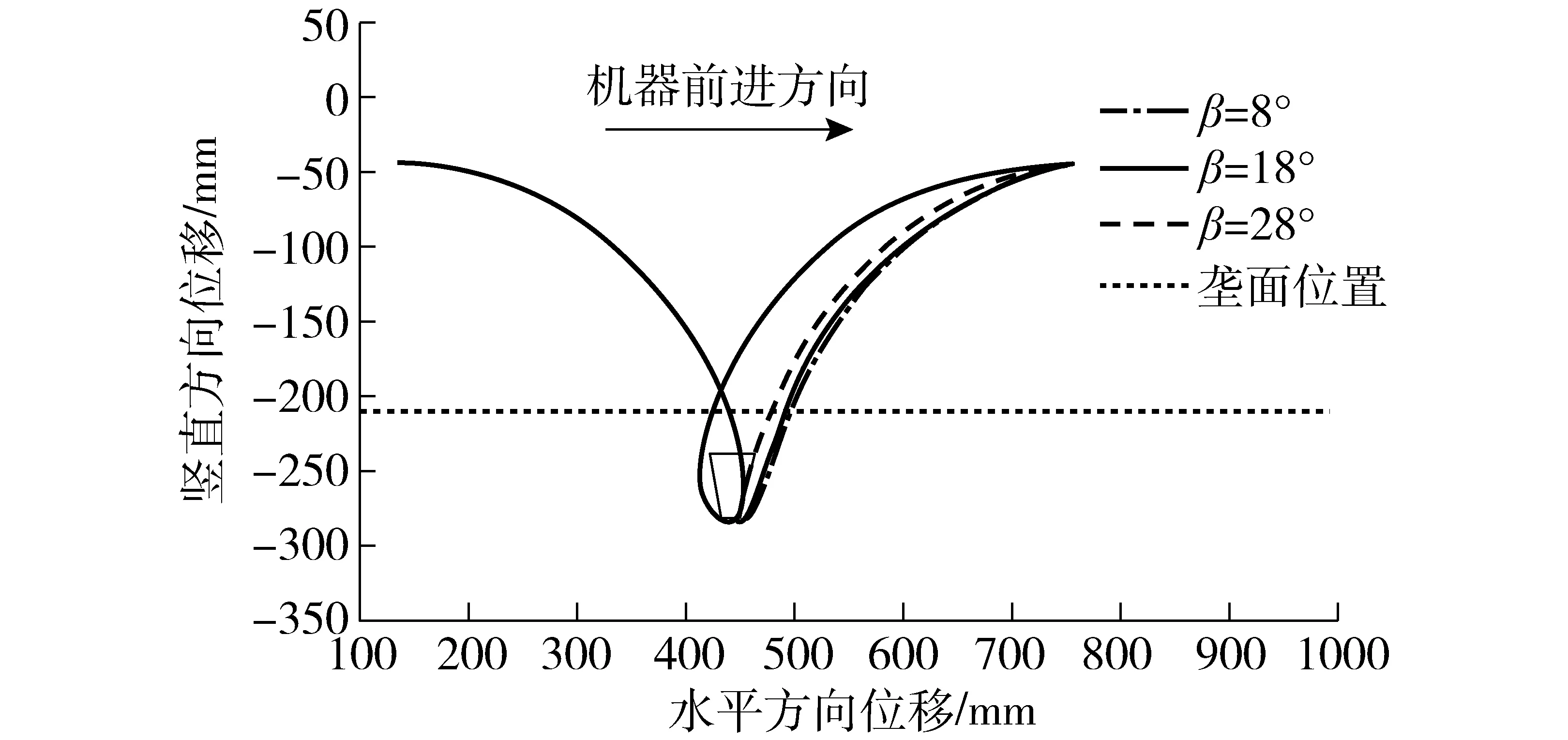
图8 β与栽植轨迹的关系Fig.8 Relationship between value of β and planting trajectory
对比图8中的栽植轨迹可以看出,β对栽植轨迹的影响与L3相反;随着β的增大,前鸭嘴的运动开合幅度减小,即前鸭嘴的避苗空间减小,可通过适当减小β来消除由前鸭嘴避苗空间不足导致前鸭嘴对苗钵的挂带现象;但随着β的减小,前后鸭嘴轨迹在垄面处形成的穴口尺寸增大,因此在满足前鸭嘴避苗空间的前提下,β的取值应尽量大。综上分析,β的变化主要影响前鸭嘴的运动轨迹,对后鸭嘴运动所形成的环扣形状没有影响,β的选取应充分考虑前鸭嘴避苗空间和穴口尺寸的大小。
3.4 后鸭嘴末端点至鸭嘴转轴中心距离L4对栽植轨迹的影响
在中间株距310 mm下分析后鸭嘴末端点至鸭嘴转轴中心距离L4对栽植轨迹的影响,如图9所示。移栽频率f为60株/min(即ωd=π rad/s)时,行走速度ve=310 mm/s,其他结构及位置参数选定为:L1=83 mm,L2=22 mm,L3=38 mm,Rd=120 mm,α=82°,β=8°,C(105,-22),D(165,-17),对比图9中的栽植轨迹可以看出,随着L4的增大,栽植轨迹相对旋转中心安装位置逐渐向下;前后鸭嘴的开合距离均变大,总的开合变大,且前后鸭嘴轨迹在垄面处形成的穴口尺寸增大;在行星架旋转半径Rd一定时,L4过大会使两栽植鸭嘴干涉,L4过小会使鸭嘴末端点与旋转中心安装架距离较小,作业时栽植支架与垄面距离过近会影响作业效果。L4尺寸的选取决定着栽植鸭嘴的尺寸,鸭嘴尺寸需满足栽植深度要求,其取值应充分考虑穴盘苗的尺寸、开合距离、栽植深度和实际作业安装位置的需求。
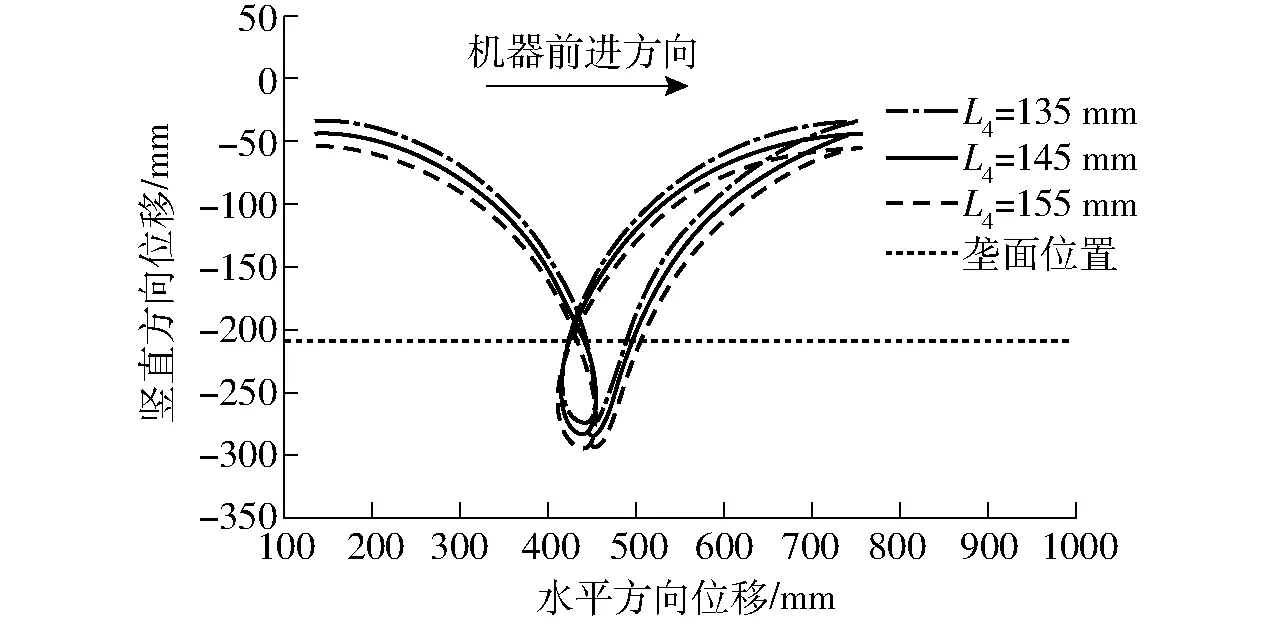
图9 L4与栽植轨迹的关系Fig.9 Relationship between length of L4 and planting trajectory
4 参数优选
通过以上分析,得到各变量参数对前后栽植点轨迹曲线的影响趋势。为使栽植机构能满足3种株距下的较高直立度要求,保证穴盘苗的栽植质量,在确定栽植机构参数时应满足以下优化目标:
(1)后鸭嘴轨迹在最低处应形成环扣,且环扣高度应大于苗钵高度。
(2)后鸭嘴轨迹回程要有向上趋势,避免太过向前与苗钵干涉使苗钵前倾。
(3)前鸭嘴轨迹回程要有向前趋势,避免向后推苗。
(4)前后鸭嘴轨迹与垄面交点处形成的穴口尺寸较小。
(5)轨迹整体高度要远大于穴盘苗高度,以防鸭嘴拖苗、压苗,轨迹高度应大于200 mm。
(6)鸭嘴长度应适当大于穴盘苗的高度且两转臂鸭嘴间不能干涉[19]。
通过以上分析,得到各参数对前后栽植点轨迹曲线的影响趋势,并结合优化目标,对栽植机构参数进行优化。首先由经验初步设定各个参数的初始值,然后根据得到的各参数对栽植点轨迹的影响趋势,不断调整各参数数值,寻找符合优化目标要求的运动轨迹。综合考虑各组轨迹的优劣,最终通过人机交互优选出一组较优参数组合为:L1=83 mm,L2=22 mm,L3=38 mm,L4=145 mm,Rd=120 mm,α=82°,β=8°,C(105,-22),D(165,-17)。
在3种株距下由该组参数得到的栽植轨迹如图10所示。图中虚线为穴盘苗投苗时在竖直方向的位置,实线为植苗后穴盘苗定植的位置。由图中可测出穴盘苗的栽植倾角。由图可以看出,在3个栽植挡位下,前鸭嘴均不带苗,在株距280 mm和株距310 mm下,后鸭嘴的运动轨迹在植苗段形成环扣,且环扣高度大于苗钵高度。前后鸭嘴避苗空间充足,穴盘苗的栽植倾角为0°,满足直立度要求。在株距345 mm时,后鸭嘴轨迹形成的环扣形状减小,后鸭嘴轨迹回程与穴盘苗竖直位置发生轻微干涉,产生回带苗现象使穴盘苗前倾。当穴盘苗完全脱离后鸭嘴被定植时,由图可测得穴盘苗栽植倾角为3°,可知该组结构参数能够满足3种株距下移栽作业的直立度要求。
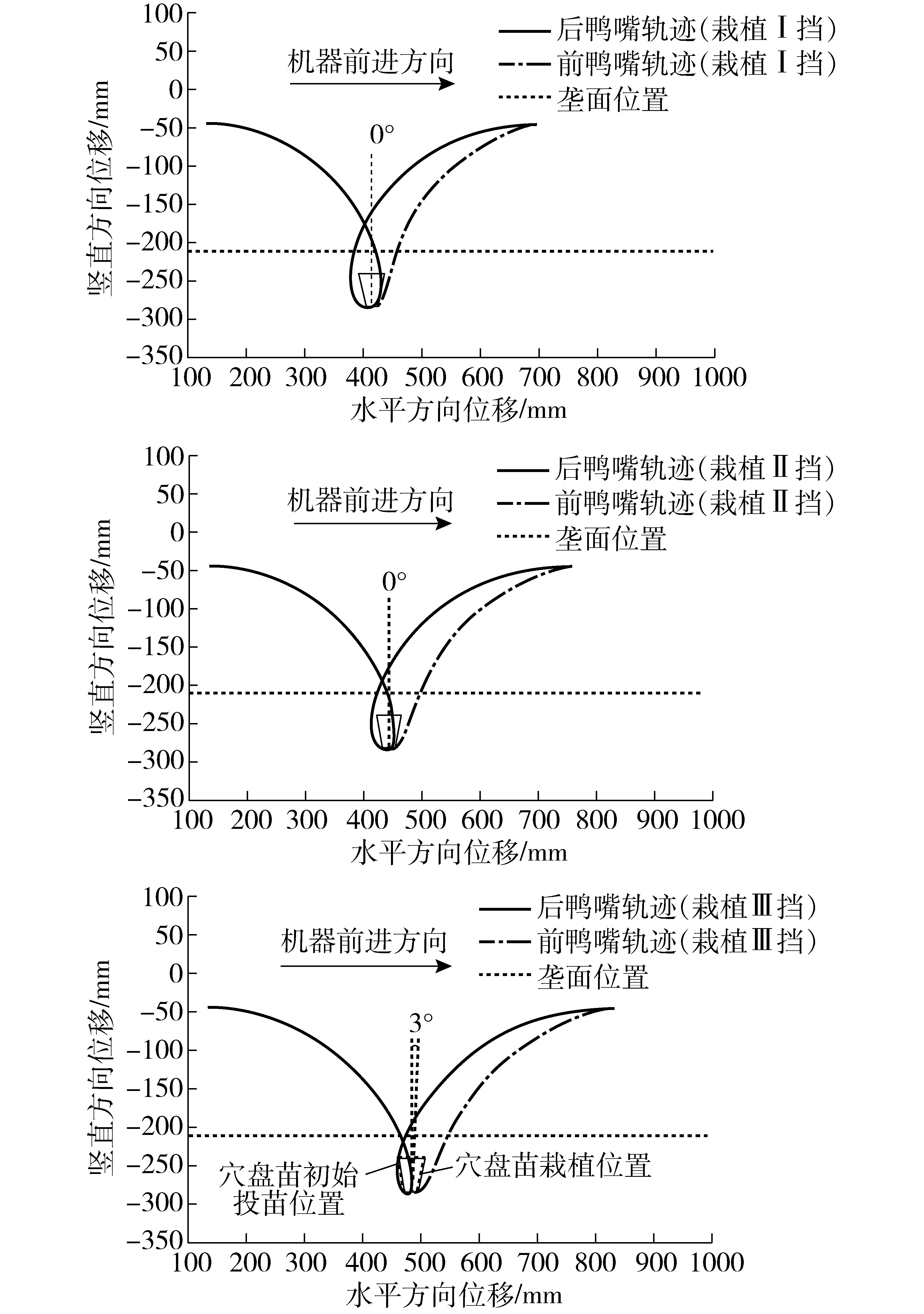
图10 不同株距下的栽植轨迹Fig.10 Trajectory under different planting distances
5 试验结果与分析
试制样机实物及试验效果如图11所示,对栽植机构进行田间试验,以进一步验证其实际栽植情况。田间试验选择沙壤土进行,事先用拖拉机带动旋耕装置进行松耕,松耕后土壤平均碎土率不小于60%,含水率不大于20%,松耕深度不低于200 mm。随后用起垄机进行开沟起垄,垄宽为1 100 mm,垄高为200 mm,沟宽为300 mm,起垄后垄面平整,无杂草及碎石等障碍物;田垄0~200 mm土层平均含水率为16.2%,平均紧实度为12.7 N/cm2。选用72孔穴盘培育的黄瓜苗为试验对象,苗龄为35 d左右,穴盘苗平均高度126.42 mm,平均质量20.58 g,苗钵含水率60%左右,育苗基质配比为草炭、蛭石、珍珠岩体积比为3∶1∶1。

图11 试验样机Fig.11 Prototypes for testing
整机田间试验时,自走式移栽机的行走轮在沟底行走,栽植机构在垄面上作业,控制栽植鸭嘴的栽植深度为80 mm;根据实际垄长,每组移栽2盘共144株蔬菜苗。测试不同栽植频率时3个挡位株距下的栽植性能,统计田间数据时将前后24株蔬菜苗去除,测量中间120株区域的栽植状态,结果如表2所示。
试验时测量穴盘苗间的株距,计算其标准差和平均值
得株距变异系数

SX——株距标准差,mm
CX——株距变异系数,%
试验时测量穴盘苗与地面夹角A,将植株与地面夹角A≤30°判定为倒伏,30°
结果分析:
(1)栽植机构在3个挡位株距下作业时,蔬菜苗栽植直立度优良率均能达到81%以上,总的优良合格率达94.8%以上,能够较好地满足栽植要求;由表2中趋势可看出,直立度优良率随着栽植频率的增加而减小,主要原因是随着栽植频率增加,栽植时投苗时间过短,蔬菜苗与鸭嘴脱离时间过短有被鸭嘴往上带的趋势,从而影响栽植状态,导致栽植优良率有所下降。
(2)每组株距变异系数均较小,且不同株距及栽植频率下变化差异不大,原因是栽植机构由底盘动力以一定传动比输入,栽植机构的转速随底盘前进速度的变化而相应改变,因此株距不受栽植频率的影响,具有较好的株距稳定性。
(3)表2中有效测定株数指实测有效株数,小于理论测定值的情况是因为存在一定的漏栽数,这是由于作业时机器震动较大,苗钵由导苗筒落入鸭嘴时状态不稳定导致苗钵落至鸭嘴外侧。
6 结论
(1)针对不同作物有不同株距栽植要求,以自制行星轮转臂式栽植机构为研究对象,构建栽植机构理论模型,分析建立了栽植机构前、后鸭嘴栽植点的运动轨迹数学模型,并基于该模型建立Matlab仿真分析辅助程序。
(2)基于Matlab GUI设计了计算机辅助优化设计人机交互界面,分析各主要参数对前后栽植点运动轨迹的影响规律,对该机构进行参数优化,由人机交互优化得出一组满足优化要求的机构参数组合:L1=83 mm,L2=22 mm,L3=38 mm,L4=145 mm,Rd=120 mm,α=82°,β=8°,C(105,-22),D(165,-17)。
(3)以72孔黄瓜穴盘苗为试验对象,直立度和株距变异系数为评价指标,对研制的移栽机栽植机构进行田间植苗试验。结果表明:在3个株距下作业时,蔬菜苗栽植直立度优良率均能达到81%以上,总优良合格率94.8%以上,能够较好满足直立度和多株距移栽要求,验证了理论建模和优化方法的正确性和可行性。