压电叠层作动系统柔性机构的仿真设计
2018-12-03陈西府
李 明,陈西府,卢 倩
(1.江苏大学机械工程学院,江苏 镇江 212000)(2.盐城工学院机械工程学院,江苏 盐城 224051)
压电叠层以其体积效率高、功耗小、输出位移大、响应迅速以及可控性好等优点广泛应用于压电作动系统[1-2]。使用压电叠层作为压电作动系统的激振元件,可使驱动足产生足够的振幅以驱动动子,提高电机的输出性能。压电叠层是多片压电陶瓷通过机械上串联、电学上并联的方式叠加在一起,作为一种电容性元件,压电叠层可承受较大的压力,并具有较强的刚度和很好的静、动态性能。
卢倩等[3]提出了通用的柔度比参数λ,分析了其对柔性铰链的柔度特性的影响,并提出了柔性放大机构的优化设计方法。于志远等[4]基于柔性铰链提出了一种微位移放大机构,通过建立柔性铰链的有限元模型,研究柔性铰链凹口处长与宽的比值对刚度的影响,设计了一款压电致动器的微位移放大机构。郑伟智等[5]总结了弹性铰链微位移放大机构造成位移损失的因素,分析弹性变形对放大效果的影响,对弹性铰链的尺寸设计和结构的布局提出了解决方案。
压电叠层虽然可承受较大的压力,但抗拉、抗剪切能力差。为了同时获得压电叠层的合理输出力和输出位移,需要对压电叠层作动系统进行柔性设计,以保证压电叠层工作时的位移输出符合要求和避免压电叠层受到剪切应力。本文以压电叠层的输出性能为研究目标,提出了3款压电叠层作动系统的柔性机构,利用ANSYS Workbench仿真分析软件,比较了3款柔性机构的结构参数对压电叠层输出性能的影响,在此基础上设计了可充分发挥压电叠层输出性能的柔性机构。
1 柔性机构的设计
压电叠层能用于静态和动态工作,可承受较大的压力,具有很高的强度,但压电叠层的抗拉应力和抗剪切应力较差。为同时获取压电叠层的合理输出力和输出位移,需要根据机械系统的设计目标对压电叠层作动系统进行柔性设计。
柔性设计包括柔性导向设计、柔性预紧机构设计。柔性机构包括导向块结构、悬臂梁结构和刚性环形框结构。导向块可作为压电叠层的导向系统,悬臂梁和刚性环形框可为压电叠层提供预紧力。根据柔性机构的设计要求,本文提出了3款柔性机构,即双侧平行悬臂柔性机构、双侧单悬臂柔性机构和单侧平行悬臂机构,如图1所示。
2 有限元仿真分析
2.1 有限元前处理
对第1节提出的双侧平行悬臂柔性机构进行有限元仿真分析,研究柔性机构的导向块在受力后产生的位移对压电叠层输出性能的影响,从而为柔性机构的设计提供参考。双侧平行悬臂柔性机构的结构简图如图2所示,定义垂直于导向方向为x方向,平行于导向方向为y方向。

图1 悬臂柔性机构

图2 双侧平行悬臂柔性机构的结构简图
首先建立柔性机构的仿真模型,如图3所示。柔性机构的材料为45钢,其在ANSYS Workbench中所定义的材料属性为:密度ρ=7 890kg/m3,杨氏模量E=209GPa,泊松比λ=0.269。
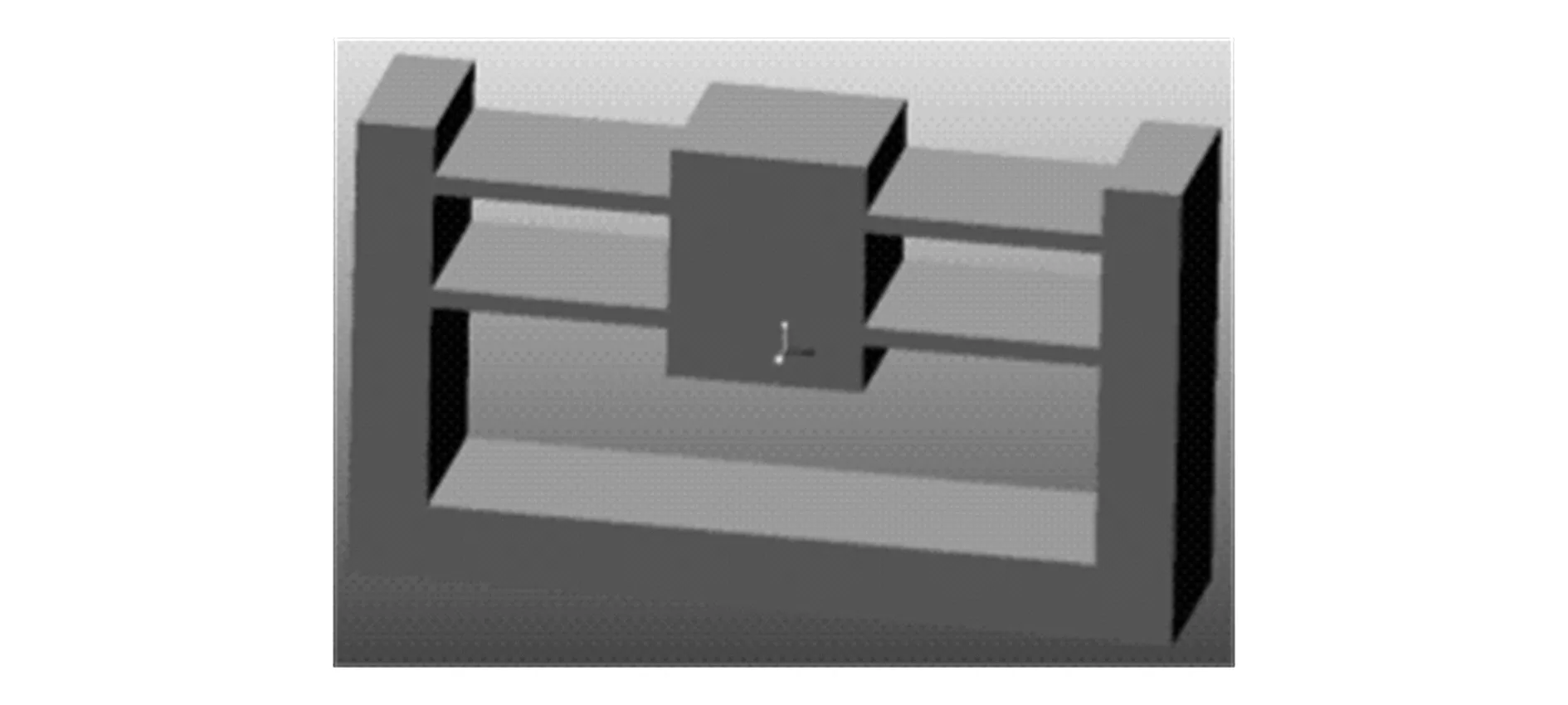
图3 柔性机构仿真模型
为了提高仿真分析精度,采用二阶四面体网格,以单元尺寸控制法对柔性机构仿真模型进行网格划分。采用0.5mm的单元格尺寸对柔性梁结构进行网格划分,采用2mm的单元格尺寸对导向块和刚性环形梁结构进行网格划分,共计有节点39 829个,单元22 318个,网格质量为0.76,满足仿真分析精度要求,划分完成的网格模型如图4所示。

图4 柔性机构网格模型图
对刚性环形框进行固定约束。参考压电叠层工作时的输出力,对导向块施加300N的载荷,施加边界条件后仿真模型如图5所示。
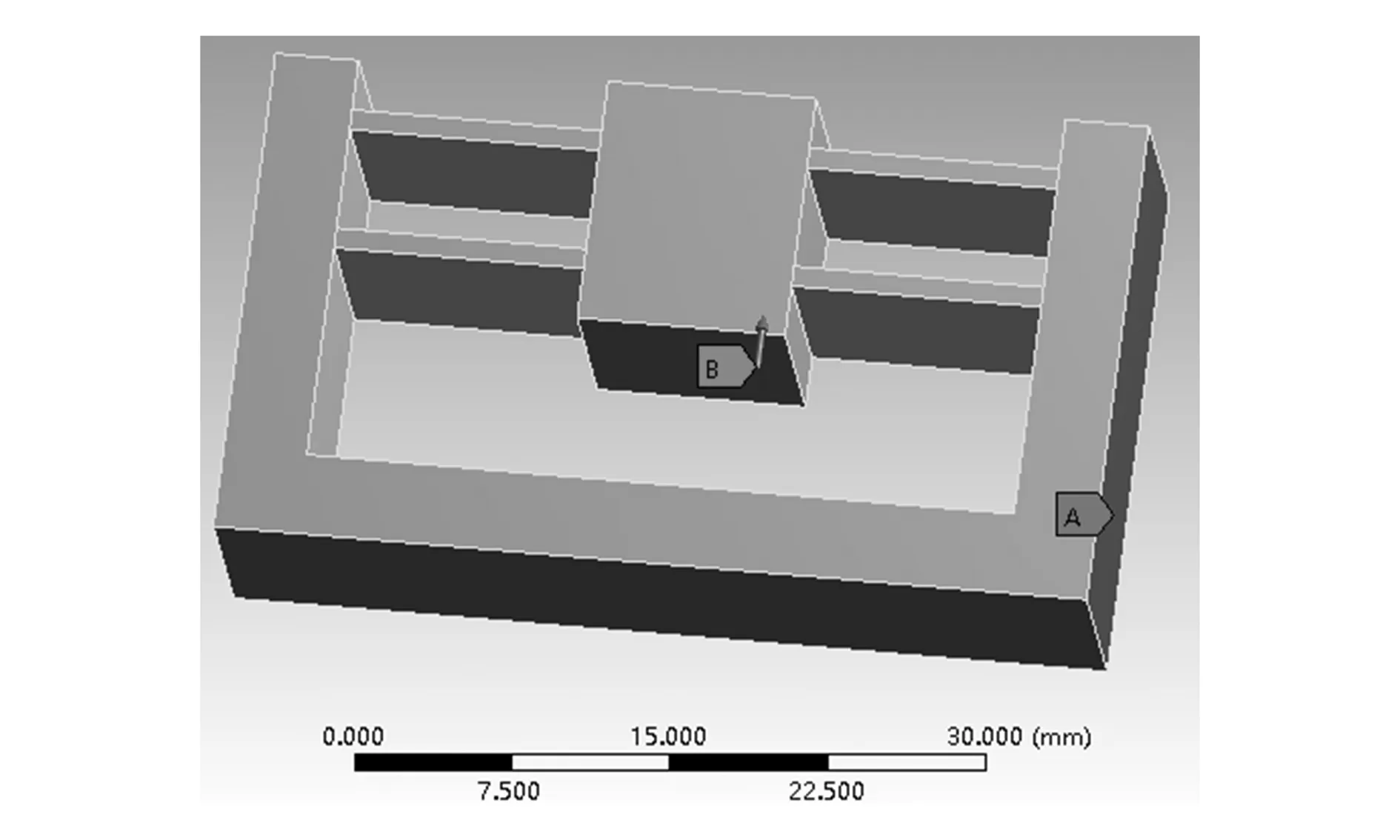
图5 柔性机构约束和载荷
2.2 有限元仿真分析结果
对柔性机构进行静力学仿真分析,得到分析结果分别如图6、图7所示。从图中可以看出,柔性机构的导向块在x方向发生了微小的位移,在y方向的位移较大,最大应力出现在悬臂梁和导向块与刚性环形框接触的位置,即压电叠层输出的位移作用在柔性机构时,导向块可起到导向作用,并能消除压电叠层在工作时产生的剪切应力。刚性环形框和悬臂梁的组合可提供压电叠层的预紧力。

图6 柔性机构位移云图

图7 柔性机构应力云图
3 柔性机构位移分析
文献[5]、[6] 给出的悬臂梁自由端的位移公式分别为:
(1)
(2)
式中:Δx和Δy分别为悬臂梁的变形量;S为悬臂梁的横截面积;l,m,n分别为悬臂梁的长、宽和厚;Fx为x方向的分力;Fy为y方向的分力;I为结构刚度。
根据本文提出的3款柔性机构的结构,得到以下2点推论:
1)双侧悬臂柔性机构,由于其结构为对称结构,且压电叠层的输出力和输出位移作用在机构的对称线上,因此理论上导向块在x方向的位移为零;单侧平行悬臂柔性机构,悬臂梁的自由端与导向块固定连接,但导向块的另一侧无结构接触,等同于悬臂梁的自由端,此类柔性机构中导向块在x方向的位移变化趋势符合公式(1)。
2)双侧平行悬臂柔性机构和双侧单悬臂柔性机构为对称结构,由于双侧悬臂梁的自由端都与导向块固定连接,故导向块y方向位移的变化趋势满足公式(2);单侧平行悬臂柔性机构,类似于悬臂梁结构,因此y方向位移的变化趋势符合公式(2)。
4 柔性机构的仿真分析
压电叠层的输出力和输出位移作用在导向块上,压电叠层的输出位移表现为导向块在y方向的位移,压电叠层受到的剪切应力的大小表现为导向块在x方向位移的大小。利用仿真软件仿真计算柔性机构中导向块在x,y方向位移随悬臂梁尺寸的变化关系,结果如图8~图15所示。图中f-1代表双侧平行悬臂柔性机构,f-2代表双侧单悬臂柔性机构,f-3代表单侧平行悬臂机构。

图8 ΔLx随n的变化关系

图9 ΔLx随m的变化关系
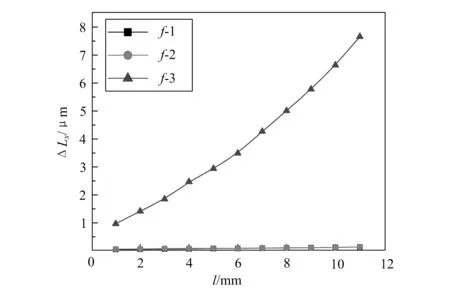
图10 ΔLx随l的变化关系
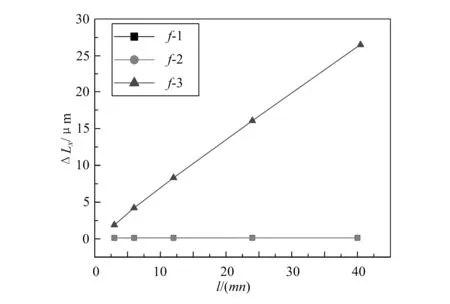
图11 ΔLx随l/(mn)的变化关系
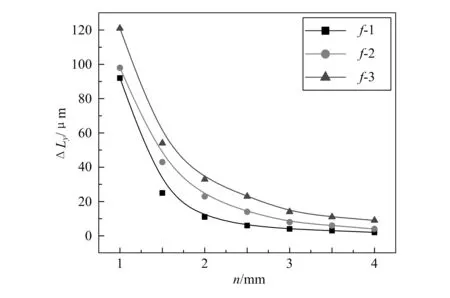
图12 ΔLy随n的变化关系

图13 ΔLy随m的变化关系

图14 ΔLy随l的变化关系
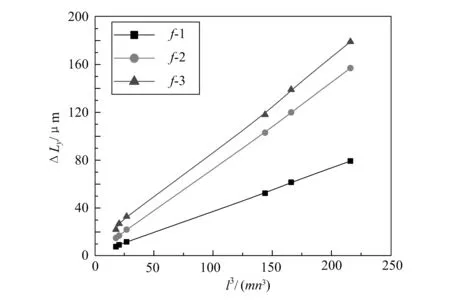
图15 ΔLy随l3/(mn3)的变化关系
由图8~11可知,在单侧平行悬臂机构中,导向块的位移随悬臂梁厚和宽的增大呈近似一次线性函数减小,导向块的位移随着悬臂梁长度的增大呈近一次线性函数增大;导向块的位移随着l/(mn)的增大呈一次线性函数增大。在双侧悬臂柔性机构中,导向块在x方向的位移近似等于零,仿真分析得出的结论与第3节的推论1)相同。
由图12~15可知,柔性机构中导向块在y方向的位移随着悬臂梁厚度的增大和长度的减小而减小,随着悬臂梁宽的增大呈近一次线性函数减小,随着悬臂梁l3/(mn3)的增大呈一次线性增大,仿真分析得出的结论与第3节得出的推论2)相同。
对于双侧悬臂柔性机构,当悬臂梁的尺寸相同时,导向块在y方向的位移为:单悬臂柔性机构的位移大于平行悬臂柔性机构的位移,即导向块的位移随着悬臂梁的增多而减小。
对于单侧平行悬臂柔性机构和双侧平行悬臂柔性机构,当悬臂梁的尺寸相同时,导向块在y方向的位移为:单侧平行悬臂柔性机构的位移大于双侧平行悬臂柔性机构的位移,即双侧平行悬臂更有利于柔性机构的稳定。
5 结论
本文对压电叠层作动系统进行了柔性仿真设计,得到以下结论:
1)平行悬臂可减小压电叠层的末端位移损失,有利于提高压电叠层的输出精度;双侧布置的悬臂可减小压电叠层的剪切应力,保护压电叠层不被破坏;
2)双侧单悬臂柔性机构可减小压电叠层的剪切应力,但是相对双侧平行悬臂柔性机构来说不利于减小压电叠层的位移损失;单侧平行悬臂柔性机构有较大的剪切应力,不利于保护压电叠层。
