GPS转发式欺骗定位误差研究*
2018-11-29胡常一王光明
胡常一,王光明,杨 俊
(国防科技大学智能科学学院,湖南 长沙410073)
0 引言
全球定位系统(GPS)以其高精度的导航和定位性能,在指挥控制、战场机动、补给支援、火力协同、战场救援和精准打击等方面发挥了重要的作用。随着导航战的不断受到重视,对GPS干扰技术的研究具有重要的现实意义[1-2]。
GPS干扰技术分为压制式干扰和欺骗式干扰。随着GPS信号发射功率提高、接收机采用空时联合滤波处理算法、点波束等抗干扰措施,使得针对GPS的压制干扰难度日益增加[3-5]。欺骗干扰是通过发射与真实GPS信号结构相一致的欺骗信号,使接收终端产生错误的定位信息,具有较高的隐蔽性,是较为理想的干扰方式[6]。根据原理,GPS欺骗干扰分为转发式欺骗干扰和产生式欺骗干扰。产生式欺骗干扰关键在于掌握GPS信号的全部结构信息,对于加密的军用P码和伪随机码,要破译其结构难度很大,造成针对GPS的产生式欺骗干扰难以有效实施[7]。转发式欺骗干扰不需要知道GPS信号的具体结构,只是对接收的GPS信号进行延时、放大、转发,工程上具有更高可行性,因此基于时延控制的转发式欺骗成为了当前GPS干扰的研究热点[8]。2011和2012年,伊朗就曾通过实施对GPS的转发式欺骗干扰成功俘获美军两型无人侦察机[9-10]。
本文从工程应用角度出发,讨论转发式欺骗中误差来源以及对定位造成的影响,对实际应用具有一定的指导意义。
1 转发式欺骗原理与数学模型
转发式欺骗通过实时接收真实卫星信号,通过转发平台进行一定的延时和放大后转发出去,若目标接收机锁定转发欺骗信号,就会得到错误的伪距值,从而解算出错误的定位位置,实现欺骗干扰的目的。
如图1所示,S1~S4代表实施欺骗干扰区域内参与定位的4颗卫星,坐标为(xSi,ySi,zSi),记为;J1~J4代表转发延时平台,具有卫星信号分离、延时以及放大的功能,坐标为(xJi,yJi,zJi),记为;R为目标接收机,坐标为(xR,yR,zR),记为;F为通过解算转发欺骗信号得到的欺骗位置,坐标为(xF,yF,zF),记为;ΔS1-ΔS4为各转发延时平台到目标接收机的距离。
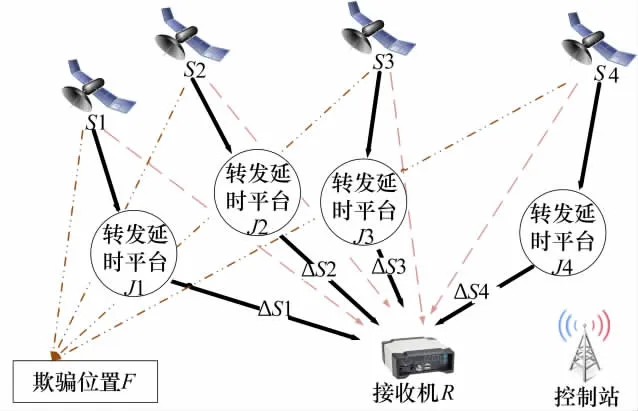
图1 转发式欺骗示意图
根据图1,目标欺骗位置F、转发延时平台Ji和目标接收机R接收各真实卫星信号的伪距为:

式中,i=1-4,j=F、Ji、R,c为光速,tu为目标接收机的钟差。
转发式欺骗主要是通过控制转发延时来实现的,转发延时可以分为自然延时和人为延时两部分,自然延时是因为传输路径改变导致的时间延迟,人为延时是为了实现欺骗而人为加上的时间延迟。
因为自然延时tαi的存在,目标接收机R接收转发延时平台信号解算各卫星伪距为:

增加人为延时Δτi后,目标接收机R接收转发延时平台信号解算各卫星伪距变为:

通过控制延时使目标接收机R接收到欺骗信号解算出的伪距值与目标欺骗位置F接收真实信号解算出的伪距值一致,以实现欺骗的目的。
又根据自然延时的定义,目标接收机R接收到的仅经过自然延时的各卫星伪距测量值应该等于转发延时平台Ji接收各真实卫星信号的伪距测量值加上转发延时平台Ji与目标接收机R的距离,即:

联立式(1)~(4)得人为延时Δτi为:

2 转发式欺骗误差分析
2.1 转发式欺骗误差来源
根据上述讨论,转发式欺骗主要是通过增加人为延时从而改变观测伪距值,进而实现定位欺骗的目的。分析式(5)中各项参数含义,可知转发式欺骗误差源主要来自四个方面,分别是:星地定位误差、雷达探测误差、链路延时误差以及信号延时控制误差。
星地定位误差包括测量卫星Si到欺骗位置F、卫星Si转发延时平台Ji的位置时产生的2个误差。星地定位误差由与卫星有关的误差(卫星星历误差、卫星钟差、相对论效应影响)、与传输途径有关的误差(电离层折射误差、对流层折射误差、多路径效应)、与接收机有关的误差(接收机钟差、接收机位置误差、接收机天线相位中心位置偏差)三部分组成,其中与卫星有关的误差和与传输途径有关的误差可以通过相应的改进算法对误差进行优化,针对与接收机有关的误差,通过采用同一批次的高精度GNSS接收机进行实时星地定位,其钟差近乎一致,以保证测量的实时性和精确性。
雷达探测误差是雷达探测目标接收机R载体位置时产生的误差。雷达在探测目标接收机载体位置R时,由于探测精度、探测延迟、探测间隔等的影响,会形成一定的误差,采用高精度的探测雷达,可减小雷达探测误差。
链路延时误差是测量标定控制站接收卫星Si、转发延时平台Ji、目标接收机R、欺骗位置F信息到发出控制指令作用于转发延时平台所消耗时间的误差。
信号延时控制误差是转发延时平台在对真实信号进行延时控制时造成的误差,采用数控延迟线设备对信号进行延时,以提高延时精度。
2.2 转发式欺骗控制量误差分析
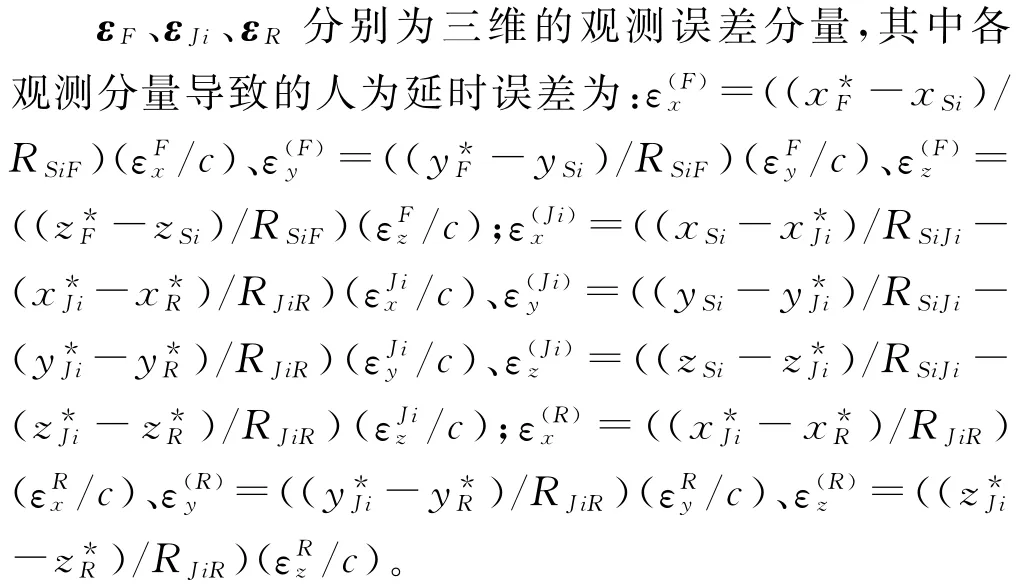
考虑2.1节讨论的各项误差,将式(5)中的各项具化,得到:

,即带有星地定位误差的欺骗位置F、转发延时平台Ji的坐标观测值*为x(),即带有雷达探测误差的目标接收机R 的坐标观测值;ε1、ε2分别为链路延时误差和信号延时控制误差。
为分析各误差项对人为延时的影响,将式(6)分为对各观测值分量以及链路延时误差、信号延时控制分别求偏导,有:

则2.1节讨论的5个误差源导致的人为延时的绝对误差分别为:


故5个误差源导致最终人为延时的绝对误差εΔτi为:

3 转发式欺骗定位误差仿真试验
根据前文讨论,对转发式欺骗定位误差进行仿真试验。以长沙为例,根据经纬度换算,将目标接收机R设置为国防科技大学田径场,其在地心地固坐标系中的坐标为 (-2.2089×106,5.2020×106,3.0547×106),将欺骗位置F设置为湖南师范大学图书馆,其在地心地固坐标系中的坐标为(-2.2050×106,5.2059×106,3.0509×106),根据转发延时平台通过飞艇搭载悬浮在平流层的条件,假设转发延时平台分布在真实点和欺骗点上方20km的平流层区域,同时选择较好的四颗导航卫星。具体GPS卫星S1~S4坐标、转发延时平台J1~J4坐标观测值、目标接收机R坐标观测值、欺骗位置F坐标观测值如表1所示。
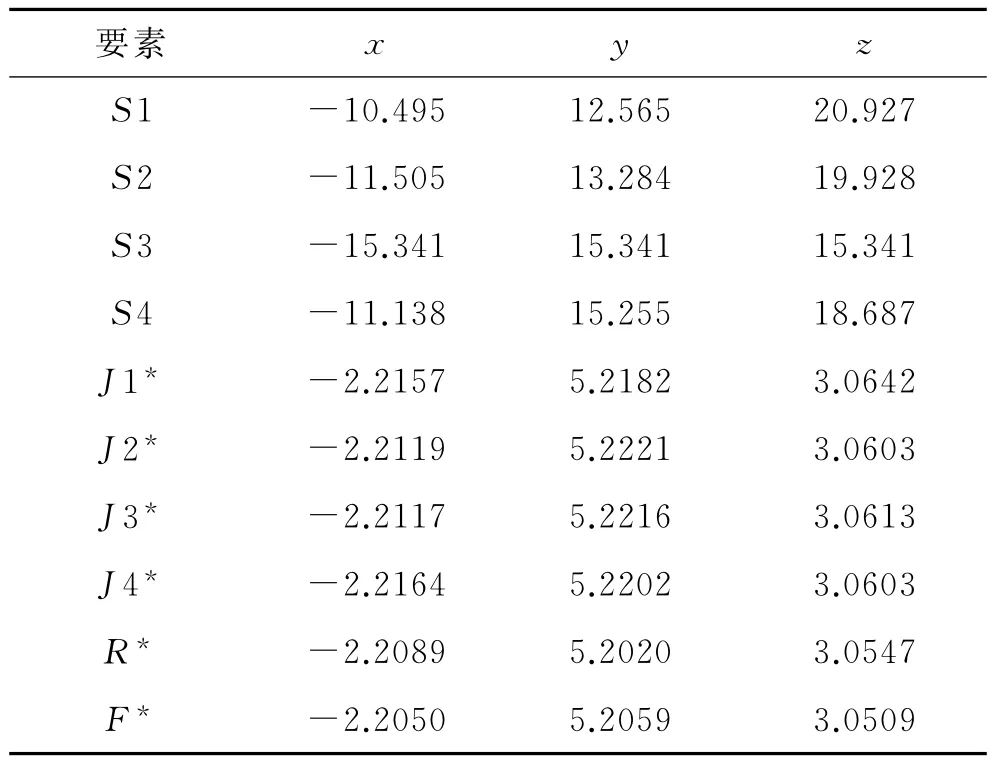
表1 各要素坐标值 106 m
将表1中数据代入式(11)~(15),分析各项误差系数,可知影响误差程度由高至低排序依次为:雷达探测误差、欺骗位置定位误差、转发延时平台定位误差、链路延时误差、信号延时控制误差。
根据实际工程应用情况,对各误差源精度进行分析。
对于星地定位误差,采用同一批次的高精度GNSS接收机进行实时星地定位,方位误差在2m以内,高度误差在10m以内。
对于雷达探测误差,采用北京瑞达恩科技股份有限公司的RDN-101目标搜索雷达,方位误差在0.5°以内,俯仰误差在1°以内。
对于链路延时误差,采用标准仪器进行离线标定,且认为其在工作过程中链路延时保持不变,链路延时标定精度一般为0.3ns。
对于信号延时控制误差,采用数控延迟线设备对信号进行延时,市面上成熟的数控延迟线设备的精度一般为0.001ns。
因为星地定位误差和雷达探测误差都是针对三维坐标定位的误差,为方便分析,假定雷达距离目标接收机1km,将其对应的方位误差和高度误差折算至地心地固坐标系中的三个轴的误差,将表1数据带入2.2节公式,得到每颗卫星五个误差源分别导致人为延时的绝对误差和总误差为:
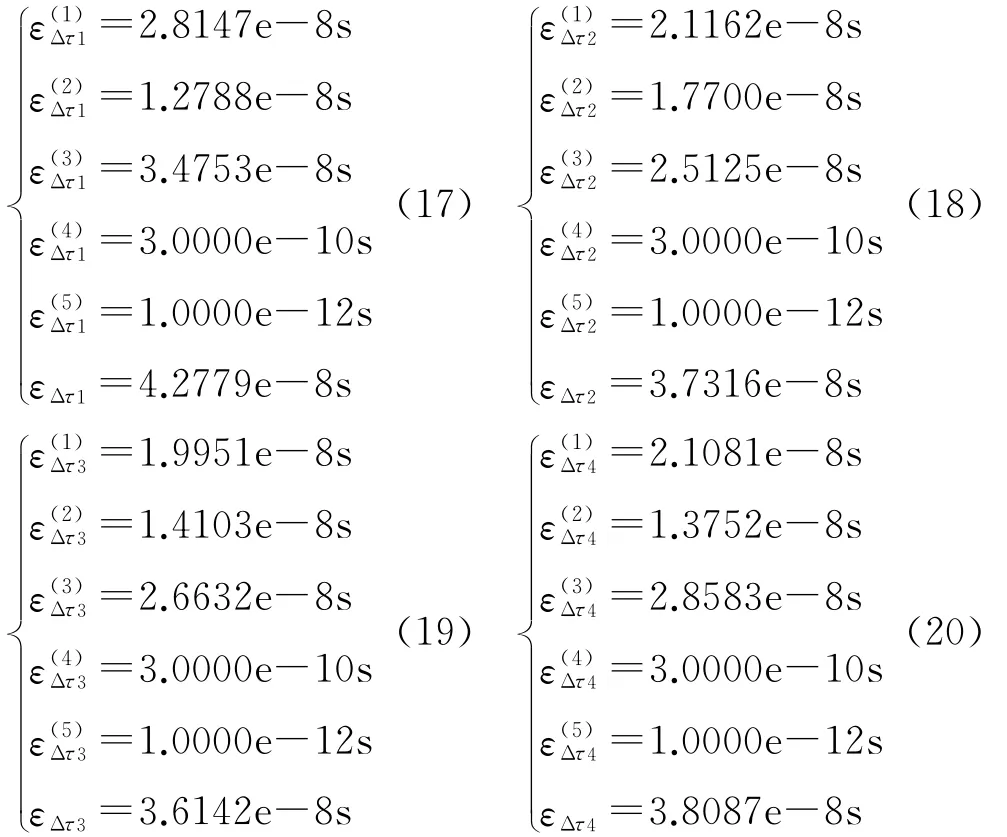
根据计算结果,星地定位误差导致的两个人为延时误差在10ns级,雷达探测误差导致的人为延时误差在10ns级,链路延时误差导致的人为延时误差在0.1ns级,信号延时控制误差导致的人为延时误差在0.001ns级。可知四类误差中,雷达探测误差对人为误差的影响最大,并且四类误差导致人为延时误差在10ns级。
将四类误差导致的人为延时误差带入欺骗信号的定位解算过程中,进行1000次定位解算,定位结果分布如图2所示。
分别计算1000次定位结果与期望位置的距离差,得到转发式欺骗定位距离差折线图,如图3所示,1000次定位距离差的均值为D =0.6667km。
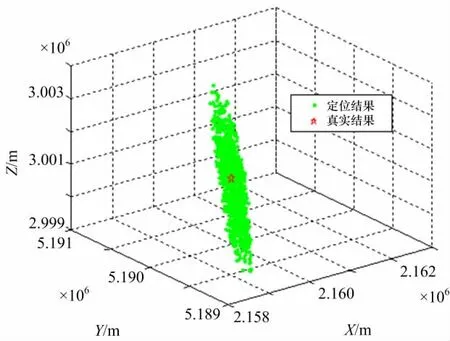
图2 转发式欺骗定位结果散点图
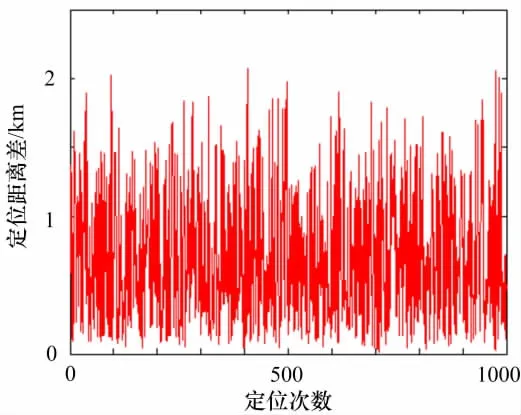
图3 转发式欺骗定位距离差折线图
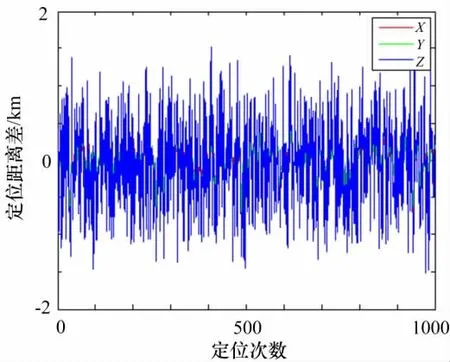
图4 转发式欺骗定位三维坐标差折线图
分别计算定位结果在X、Y、Z轴上与期望坐标的差,得到转发式欺骗定位三维坐标差折线图,如图4所示,1000次定位三维坐标差的均值和方差分别为:x=-0.0039、y = -0.0003、z= -0.0027;=0.2098、=0.0967=0.3420。定义 GDOP来表示目标在地心地固坐标系下的几何定位精度:GDOP=(++)1/2=0.8054。
分析人为延时的四类误差来源,可知雷达探测误差对转发式欺骗定位误差的影响最大,采用方位误差为0.5°,俯仰误差为1°的雷达探测1km处的目标接收机载体位置,使得最终目标接收欺骗信号定位结果与期望位置的距离差均值为0.6667km。若需要进一步减小定位误差,可采用更高精度的雷达,提高雷达精度后定位效果如表2所示。
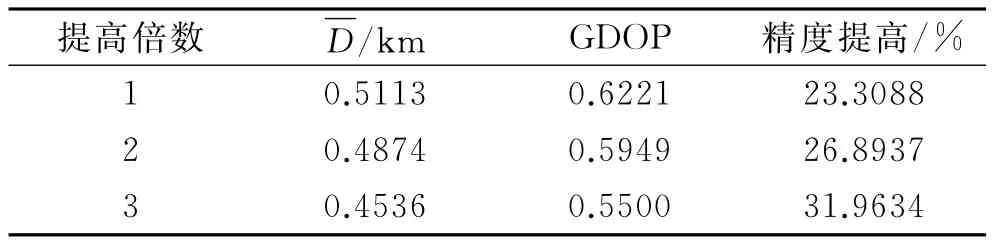
表2 雷达精度对转发式定位误差影响
此外,除了提高单个雷达精度,也可以采用多站式雷达或遥测等非雷达探测手段获取更精确的目标位置信息。
4 结束语
本文通过建立转发式欺骗模型,分析了转发式欺骗中的误差来源,并把每类误差欺骗定位精度的影响进行了分析计算,通过仿真,得出了雷达探测误差是转发式欺骗中定位结果影响最大的一类误差的结论,在实际应用中应该采取合理的目标探测方式,以获得理想的欺骗效果。■