冰芯光学特性二维重构仪开发*
2018-11-28董天骄于海滨安春雷史剑光
董天骄, 于海滨, 安春雷, 史剑光, 江 晓
(1.杭州电子科技大学 电子信息学院,浙江 杭州 310018;2.中国极地研究中心,上海 200000)
0 引 言
冰芯光学检测技术在保持冰芯固态下扫描冰芯,对冰芯剖面或冰芯切片的照片进行分析,获得冰芯的光学性质,如灰度,晶体结构等[1]。
目前,国外已经研制出多套冰芯光学测定仪。日本在2003年就已经研制出了一种冰芯光学测定仪,该冰芯光学测定仪应用于Dome Fuji ice core project Ⅱ[2]。美国国家冰芯实验室在2007年也研制出了冰芯光学测定仪[3]。该冰芯光学测定仪的扫描分辨率为0.05~1 mm。具有自动光学图像采集和数据处理的功能。然而,这些设备只能在实验室使用,无法抵抗极地的恶劣环境,难以在第一时间保存冰芯的原始信息[4]。
国内光学影相技术研究在极地科研领域起步较晚[5]。国内的光学影像仪应用在冰芯检测领域几乎没有成熟产品[6],因此,本文设计并制作了冰芯光学特性二维重构仪。仪器基于机电一体式设计,并引入全景图像拼接技术,可实现自动光学扫描、冰芯全景图重建等功能。同时,模块化设计和智能变频恒温控制等关键技术的引入,使得本仪器可满足冰川或极地恶劣环境的现场工作要求。最后,从控制精度、合成效果两个方面进行实验分析,说明本仪器能够稳定可靠地应用于极地科研工作。
1 系统设计
冰川或极地气候恶劣,运输不便,因此,本仪器采用分模块设计,便于运输和组装。仪器包括工业相机、电机滑轨、发光台、工作台、电机控制器五部分。工业相机用于冰芯拍照,电机滑轨用于控制工业相机,发光台用于冰芯打光。电机控制器用于控制电机。工作台用于安装所有模块。工业相机和电机控制器装在智能变频恒温箱中,用于保障在低温环境可靠工作。系统结构如图1所示,计算机控制相机拍摄冰芯图片,通过串口向电机驱动模块发送前进、后退和停止指令。计算机完成二维重构的任务。电机驱动模块控制步进电机的启停和方向。智能变频恒温箱保护系统的内部电路。发光二极管(light-emitting diode,LED)灯负责给冰芯、标尺打光。电源负责给整个系统供电。仪器结构如图2所示。

图1 系统结构
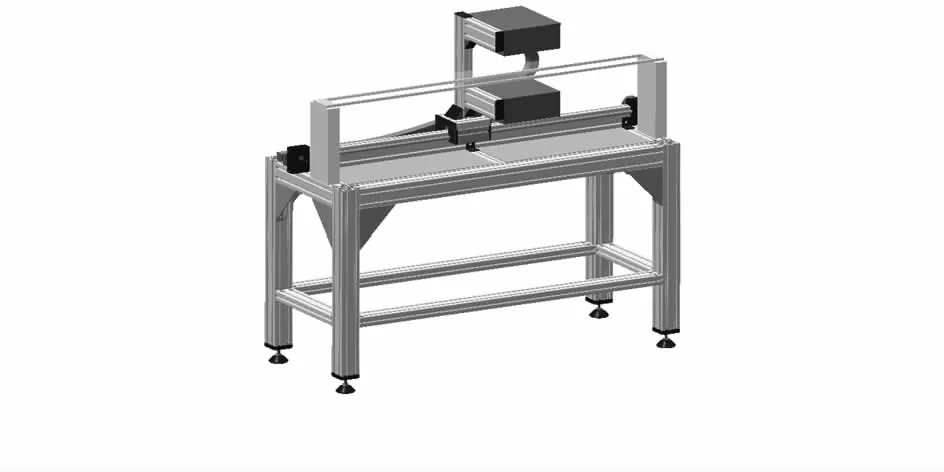
图2 冰芯扫描机床结构
2 测控系统
测控系统由自动光学扫描、图像拼接两部分组成。自动光学扫描是采用步进电机和步进电机控制器组成的一体化控制系统。自动光学扫描需要设定电机的运动方向和运动距离,从而满足前后两张图像的重叠率;控制工业相机拍照,将照片保存到本地;扫描结束后自动返回初始位置。
执行图像拼接的操作,将拍摄的多张图片合成一张完整的全景图。系统流程如图3所示。

图3 系统流程
3 图像拼接
实际工作中,冰芯样品长度1 m左右,获得一幅场景的全景图像很难。如果扩大图像采集设备的视角,会导致图像有很大的畸变,同时分辨率没有提高。为了解决这个问题,本文采用基于特征点匹配的图像拼接算法。具体拼接流程如图4所示。
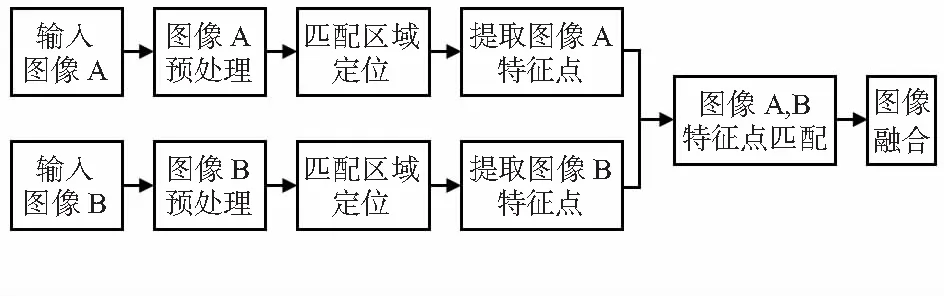
图4 基于特征点的图像拼接流程
3.1 图像预处理
拍摄的冰芯照片一般偏亮,因此,冰芯的原始图片灰度主要集中在比较亮的区间。采用直方图均衡化的方法将图像进行非线性拉伸,重新分配图像像素值,使一定灰度范围内的像素数量大致相同,以增强局部的对比度而不影响整体的对比度,使图像更加清晰。
3.2 图像匹配区域定位
为了减少图像拼接的运算时间,需要确定两幅图像中配准的区域。因为本仪器是水平扫描,所以在图像配准时,只需在相似区域内进行特征点的提取和配准,从而缩短了图像拼接的时间。
图像匹配的时前后图像的重叠率在30 %左右效果较好,考虑到步进电机在运动中存在丢包的现象,行进距离不是非常精确。因此,本文选择前后图片40 %的区域作为图像匹配区域,如图5所示。

图5 图像匹配区域定位
3.3 图像特征提取
确定图像匹配区域后,就要在匹配区域内进行特征提取和匹配。因为本文中采集的图像只存在平移变换,为了加快检测速度,采用FAST特征提取。FAST角点的定义为:若某像素与其周围邻域内足够多的像素点相差较大,则该像素可能是角点
(1)
式中I(x)为圆周上任意一点的灰度,I(p)为圆心的灰度,εd为灰度差的阈值,N为满足不等式的个数。如果N大于给定阈值,一般为周围圆圈点的3/4,则认为该像素是1个特征点。
3.4 图像特征匹配

为了提高图像匹配精度,采用RANSAC算法对变换矩阵进行求解与精炼。
3.5 图像融合
图像匹配后,图像间的变换关系唯一确定。但由于拍摄时光照、环境条件的差异,两幅待拼接图像的重叠区域可能会有较大的差异。如果直接对图像进行叠加拼接,则在拼接位置上会存在明显的拼接缝以及重叠区域的模糊和失真的现象。
本文采用加权平均的融合方法进行图像平滑过渡。假设f1,f2是两幅待拼接的图像,f是融合后的图像,则
(2)
式中d1,d2为权重值。在重叠区域中,d1由1渐变到0,d2由0渐变到1,由此实现了在重叠区域无缝拼接。
4 实验与结果分析
实验计算机采用Windows 7 64位系统、Intel i3处理器、8GB内存;网络工业相机分辨率为1 920像素×1 080像素。系统采用Microsoft Visual Studio 2013的开发环境,C#编写PC端软件,冰芯采用纯净水冻结而成的冰砖样品。
1)步进电机控制精度分析
控制方式为开环工作,选用6,12,16 cm,3个设定距离来分析运行精度,每个重复3次,得到结果如表1所示。

表1 步进电机运行距离的误差
从结果上可以看出,由于步进电机存在丢帧的现象,步进电机的实际运行距离都会比设定距离小一点。但运行误差不超过10 %,不会对前后两张图片的重叠区域产生太大影响。因此,误差可以接受。
2)冰芯图像拼接分析
本文在4种亮度环境中对冰芯进行图像拼接,拼接后的冰芯全景如图6所示,可以看出,拼接后的图片完整的保存了整条冰芯,整幅图细节清晰,过渡自然,达到设计要求。

图6 冰芯全景
5 结 论
设计的冰芯光学特性二维重构仪实现了光学扫描、重建冰芯全景等功能。本仪器全程自动控制,有效减轻了科研人员的负担;重建后冰芯全景图分辨率高达7 200像素×1 080像素,有效保存了冰芯的细节信息。仪器工作稳定可靠,满足科研工作的要求,为冰芯科研工作提供一种便捷高效的现场分析工具。
