三棱台式太阳跟踪光电传感器及特性*
2018-11-28彭佑多
宁 宇, 彭佑多, 颜 健
(湖南科技大学 机械设备健康维护湖南省重点实验室,湖南 湘潭 411201)
0 引 言
高精度的太阳跟踪技术是保证聚光器最大限度捕获太阳能的关键[1,2]。当前,太阳跟踪技术主要有视日轨迹跟踪、光电跟踪及混合跟踪等模式。其中,混合跟踪是将光电跟踪与视日轨迹跟踪组合并组成闭环控制,具有较高的跟踪精度而广泛应用[3,5]。因此,提高光电传感器的跟踪精度具有重要的意义。张辉等人[6]研究的四象限探测器能够实时地检测太阳的位置,使用灵活、方便,但存在追踪视场方位偏小、容易丢失目标,引起控制系统失效,甚至导致执行机构产生误动作;Parthipan J等人[7]研究的隔板式光电传感器具有结构简单、价格低廉,但易受到外部光源和其他散射光的影响,跟踪精度不高。Bentaher H等人[8]研究的几何斜面传感器是依据斜面的两个光敏电阻器接收光照强度不同,可以使聚光器等朝向太阳光照强度最大的位置,但其精度较低,不能适应于碟式太阳能光热发电装置。
本文提出了一种三棱台式太阳跟踪传感器,能够有效解决目前太阳跟踪光电传感器普遍存在的视场范围小和跟踪精度不高等问题,这对新型光电传感器的开发利用和太阳跟踪精度提高都具有积极意义。本文针对该传感器的视场范围、太阳聚焦光斑光强进行研究,为太阳跟踪光电传感器的研制提供参考。
1 传感器与工作原理
如图1所示,太阳位置光电跟踪传感器主要由粗跟踪传感器、精跟踪传感器、可编程控制器等模块组成。太阳跟踪系统启动后首先进入粗跟踪模式,但此时不能精准对准太阳,粗跟踪结束后进入精跟踪模式。

图1 太阳跟踪光电传感器结构示意
1.1 粗跟踪传感器
粗跟踪传感器包括三个光敏电阻器、三棱台式安装座及圆形底座,三棱台式安装座的侧面上分别设有一个光敏电阻,三棱台式安装座固定安装在圆形底座上,如图2(a)。

图2 三棱台太阳跟踪传感器
粗跟踪是利用三个光敏电阻器所接收的太阳光照强度的不同,而产生的方位角偏差信号和高度角偏差信号,通过可编程控制器将这种方位角偏差信号和高度角偏差信号转换为电机的转动角度从而驱动高度角电机和方位角电机作出相应地顺/逆时针转动而达到粗跟踪的目的。其主要的工作原理如下:
1)三个光敏电阻器分别为为参考电阻器、方位角电阻器、高度角电阻器。
2)在太阳偏离粗跟踪装置中心轴线位置较大时,启动粗跟踪装置,首先调整方位角,可编程控制系统将参考电阻器的电信号S1与方位角电阻器的电信号S2比较,当S1>S2时,则表示太阳位置在粗跟踪装置中心轴线的左侧,控制系统使得执行机构逆时针转动,直到S1≈S2,反之亦同。
3)在高度角调整时,可编程控制系统将参考电阻器的电信号S1与高度角电阻器的电信号S3比较,当S1>S3时,则表示太阳位置在粗跟踪装置中心轴线的上方,控制系统使得执行机构向上转动,直到S1≈S3,反之亦同。
由上述可知,3只光敏电阻器将接收到不同的光照强度,产生不同偏差信号,设Us1,Us2,Us 3为光敏电阻器输出信号所对应的采集信号电压值,根据粗跟踪的原理,可以得到粗跟踪的方位角偏差信号ΔUx和高度角偏差信号ΔUy
(1)
根据式(1)得到的偏差信号ΔUx和ΔUy,系统可以控制相应电机正转或者反转,实现对方位角和高度角的调整,使传感器的主光轴线朝向太阳光照强度最大的方向。
粗跟踪具有可感应范围广、在太阳被云层遮挡的情况下更有效率地响应传感器等优势。但由于太阳光照强度的不均匀,以及多云天气的影响而只能使传感器主光轴线朝向太阳光照强度最大的方向,不能够使聚光系统精准地对准太阳,因此粗跟踪模式结束后需进入精跟踪模式。
1.2 精跟踪传感器
三棱台式安装座的顶面朝下设有安装定位孔,精跟踪传感器内嵌入该安装定位孔中,精跟踪传感器主要由平凸透镜、圆柱筒、白色光屏、安装盘、电荷耦合器件(charge coupled device,CCD)相机组成,如图2(b)。
粗跟踪完成后,传感器的主光轴线已基本对准太阳,此时,精跟踪模式自动启动,太阳光透过平凸透镜聚焦在白色光屏上形成聚焦光斑,通过CCD相机拍摄白色光屏,得到太阳聚焦光斑图像,将聚焦光斑图像投射到图像传感器上,经过光电转换,将光信号转换成电信号,经过模/数转换,将光斑图像信息转换成数字信号,再交由可编程控制器加工处理,通过通用串行总线(universal serial bus,USB)接口连接计算机处理,可以得到光斑质心的坐标位置,可编程控制器将质心坐标转换为电机的转角并控制执行机构在方位和高度两个方向转动,直至聚焦光斑质心位置对准圆形白色光屏的圆心,从而使精跟踪传感器主光轴线与太阳光线重合。图2(b)中圆柱筒的内壁使用高吸收率的涂层用于吸收多余的杂散光,有利于提高聚焦光斑的质量。
精跟踪过程中,传感器的主光轴线与太阳光线是否重合取决于太阳聚焦光斑的质心的提取,因此,太阳光斑的质心准确与否将直接影响到精跟踪的跟踪精度。
2 三棱台太阳跟踪传感器特性研究
2.1 视场范围
在粗跟踪装置中,设太阳光线以入射角θ照射在三棱台斜面的光敏电阻器上,则随θ的变化,三只光敏电阻器将分别产生不同的偏差信号,据此可建立3只光敏电阻器分别接收的太阳光强和入射角θ之间的数学函数关系,其几何示意图如图3所示。

图3 粗跟踪几何光学模型
图3中,OS1,OS2,OS3分别为三只光敏电阻器的法线方向,OP为太阳光线的入射方向,根据三棱台几何关系,OS1,OS2,OS3,OP用矩阵表示为
(2)

三只光敏电阻器分别所接收的太阳光强可用OP与OS1,OS2,OS3的夹角ζ1,ζ2,ζ3的余弦表示,故每只光敏电阻器所接收的光照强度可表示为
(3)
式中Is为总光照强度,I1,I2,I3为三只光敏电阻器所接收的光照强度。
由式(2)可知,光敏电阻器所接收的光照强度不仅与太阳光线入射偏角θ和方位偏角αP有关,还与β有关,β的变化范围在0°~90°之间,本文所设计的三棱台机构中取β=45°。若取方位角αP=0°,可以得到如图4(a)传感器在高度角方向的跟踪视场范围;若取高度角θ=45°,则可得到如图4(b)所示传感器在方位角方向的跟踪视场范围。

图4 传感器跟踪视场范围
由图4(a)可知,研究高度角视场范围时,I2=I3,光敏电阻器2和光敏电阻器3接收光照强度随 变化的曲线一致。θ=0°时,3只光敏电阻器接收的光照强度相等,此时传感器已完成高度角方向的粗跟踪,随着θ增大,光敏电阻器1接收的光照强度急剧下降,光敏电阻器2、光敏电阻器3接收的光照强度逐渐下降且与光敏电阻器1所接收光照强度的差值越大,同时光敏电阻器产生的偏差信号越大,可知传感器高度角在-90°~+90°内可以探测到太阳位置。如图4(b)可知,αP=0°时,In=0,I2=I3,光敏电阻器1~光敏电阻器3接收光照强度随αP变化曲线呈三角函数形状。随αP增大,3只光敏电阻器接收光照强度之间有明显的差值,同时光敏电阻器也产生偏差信号,可知传感器方位角在-180°~+180°内可以探测到太阳位置。
2.2 聚焦光斑光强
精跟踪精度取决于太阳光斑质心的提取,在太阳光斑质心提取的过程中,在白色光屏上所形成聚焦光斑的质量对传感器的跟踪精度有直接影响。
在精跟踪装置中,太阳光线透过平凸透镜在白色光屏面上形成聚焦光斑,设聚焦光斑质心坐标为A(x0,y0)。太阳光线与平凸透镜中心轴线的夹角为入射偏角θ时,可以建立太阳光线入射偏角与聚焦光斑质心坐标的光学模型,如图5所示。

图5 精跟踪光学模型
根据透镜会聚成像原理,精跟踪太阳的视场角μ为
(4)
(5)
(6)
根据折射定理[10]n′sinθ=nsinη,n′为空气的折射率(n′≈1),可得到太阳光线入射偏角即高度角与聚焦光斑质心坐标A(x0,y0)关系
(7)
透过成像系统的太阳光可以看作是一束平行光,则成像系统可以近似看作是夫琅禾费圆孔衍射[11],由此可以得到圆孔衍射在白色光屏平面上的光强分布
(8)
式中I0为最大光强,J1(m)是一阶贝塞尔函数,λ为太阳光波长,R为透镜的半径。
取变量参数为:n=1.517,n′≈1,f=80 mm,R=20 mm,由式(7),基于MATLAB仿真平台,可以得到太阳入射偏角θ与聚焦光斑质心坐标之间的位置关系,如图6所示。
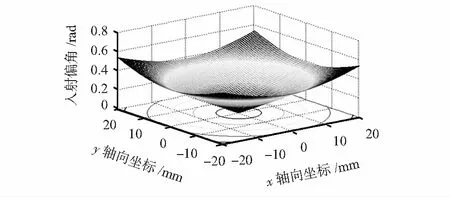
图6 精跟踪太阳入射偏角和聚焦光斑质心坐标位置模拟
根据式(4),可得到在理想的情况下精跟踪的视场范围最大为μ=28.09°。如图6所示,聚焦光斑质心坐标随着太阳入射偏角θ的变化而变化,可知θ最大的变化值为28.09°。而实际的精跟踪过程对跟踪起微调作用,因此θ的变化值往往很小。
对式(7),取λ=0.000 6 mm,以透镜半径R为变量,可得聚焦光斑光照强度与入射偏角θ的关系,如图7所示,入射光线与传感器的主光轴线平行,即θ=0°时,透镜聚焦效果最佳,聚焦光斑光强最大,随着R逐渐增大,精跟踪入射偏角临界值逐渐减小,入射偏角对应提取聚焦光斑边界轮廓越不清晰,光斑质量下降,则精跟踪装置检测范围也逐渐缩小。
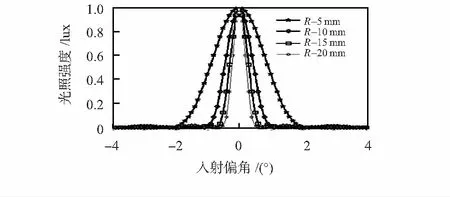
图7 聚焦光斑光照强度与太阳光线入射偏角的关系
图8为选取了入射偏角θ与传感器的主光轴线的夹角分别为0°,1°,2°,3°时所得到的聚焦光斑光照强度模拟分布图,采用MATLAB图像边界提取算法,可得到聚焦光斑边界轮廓。由图8可知,随着聚焦光斑光强值逐渐降低,所提取的聚焦光斑边界轮廓质量越差,对精跟踪装置的跟踪精度影响越不利。取R=5 mm,f=20 mm时,入射偏角为±1°时,聚焦光斑光强值较大,光斑质量较好,所形成的光斑能被正确的检测到,聚焦光斑边界轮廓的提取质量较高,因此精跟踪精度越高。

图8 不同θ时对应提取的聚焦光斑边界轮廓
3 结束语
1)提出了一种三棱台式太阳跟踪光电传感器,采用两级跟踪模式实现太阳高精度跟踪,即由粗跟踪模式确定传感器大概位置,然后通过精跟踪模式进一步缩小传感器跟踪误差,从而确保传感器实现对太阳的高精度跟踪。
2)三棱台式太阳跟踪光电传感器在高度角方向视场范围在-90°~+90°之间,方位角方向的视场范围在-180°~+180°之间,确保了传感器在大视场范围内均能有效响应。
3)采用MATLAB图像边界提取算法对不同强度的聚焦光斑图像进行边界轮廓提取,得出有效入射偏角范围为-1°~+1°,此时聚焦光斑光强值较大,能提取到质量较高的光斑边界轮廓及能有效确保传感器的跟踪精度。
