旁路吸肥式水肥一体化自动施肥机的设计与试验
2018-11-28李家春吴景来张宾宾卢剑锋
田 莉,李家春,2,吴景来,张宾宾,卢剑锋
(1.贵州大学机械工程学院,贵阳 550025;2.贵州省水利科学研究院,贵阳 550002;3.贵州东峰自动化科技有限公司,贵阳 550025)
合适的灌溉方式可以提高作物品质和产量,节约水资源,水肥一体化技术又称为微灌施肥技术,是一种借助压力系统将水源灌溉和液态肥施加结合在一起的高效新型农业技术[1,2]。与传统的灌溉模式相比,其具有节水省肥、节省劳动力、保证养分均衡供应及作物增产等明显优势[3]。在水肥一体化灌溉技术中,其核心装置是水肥一体化施肥机[4]。水肥一体化施肥机可实现对多种单元素液肥的水肥混合,根据作物生长需求进行定比混合,进而根据用户设定的灌溉施肥程序,通过灌溉系统适时适量地供给作物。尤其适用于对养分浓度有较高要求的花卉、优质蔬菜及一些高经济附加值作物[5]。虽然,近几年我国农业灌溉方式由“浇地”变“浇作物”,告别“大水漫灌”模式,但我国农业在节水灌溉水平较发达国家还是存在较大差距。本文主要是对三通道旁路吸肥式水肥一体化自动施肥机进行结构设计、吸肥量仿真分析及试验验证。
1 整机结构与工作原理
1.1总体结构
运用SolidWorks进行三通道旁路吸肥式水肥一体化自动施肥机三维建模,见图1,主要由机架、主管路系统、注肥系统、混肥系统、检测系统及控制系统组成[6]。其主要技术指标和技术参数见表1。

图1 三通道旁路吸肥式施肥机整机结构简图Fig.1 Schematic diagram of the three-channel bypass suction fertilizer fertilizer machine

表1 主要技术指标和技术参数Tab.1 Main technical indicators and technical parameters
该结构中,机架由方形不锈钢搭建而成,稳定性较好;主管路系统由抽吸泵和相应的管道组成,为系统提供足够的压力和流量,满足混肥系统工作要求;注肥系统由浮子流量计、流量调节阀、电动阀、止回阀及相应的PVC管路组成;混肥系统由射流器及相应的PVC管路组成;检测系统由EC/PH传感器组成;控制系统以西门子PLC为控制元件。
1.2 工作原理
施肥机运行原理见图2,运行时施肥机主管道注水口保持一定压力值且需满足足够的灌溉水供用,应用射流器原理把液肥吸入注肥通道内,启动吸肥系统射流器工作的压差值由加压注水口和装配在施肥机上的抽吸泵提供。施肥机运行时,在加压主管道注水口和抽吸泵的作用下,灌溉水被恒压注入管道,在射流器喷嘴处达到最大值,并对射流器吸入室产生真空,利用射流器的工作原理完成对各通道单元素液肥的吸取[7,8]。施肥机在运行时,射流器吸肥通道因抽吸泵产生的吸力,使其具有最高的吸入量,损耗最低,完成吸肥过程。
控制系统通过对三注肥通道上电动阀的启闭进行控制,实现对各通道单元素液肥的吸肥量控制。EC/PH传感器对水肥混合液酸碱度及电导率进行实时检测,并反馈到控制系统[9]。混合后的水肥混合液在抽吸泵的作用下以一定压力输出,通过灌溉管网进行农作物的水肥一体化灌溉,满足农作物的水肥一体化灌溉需求。
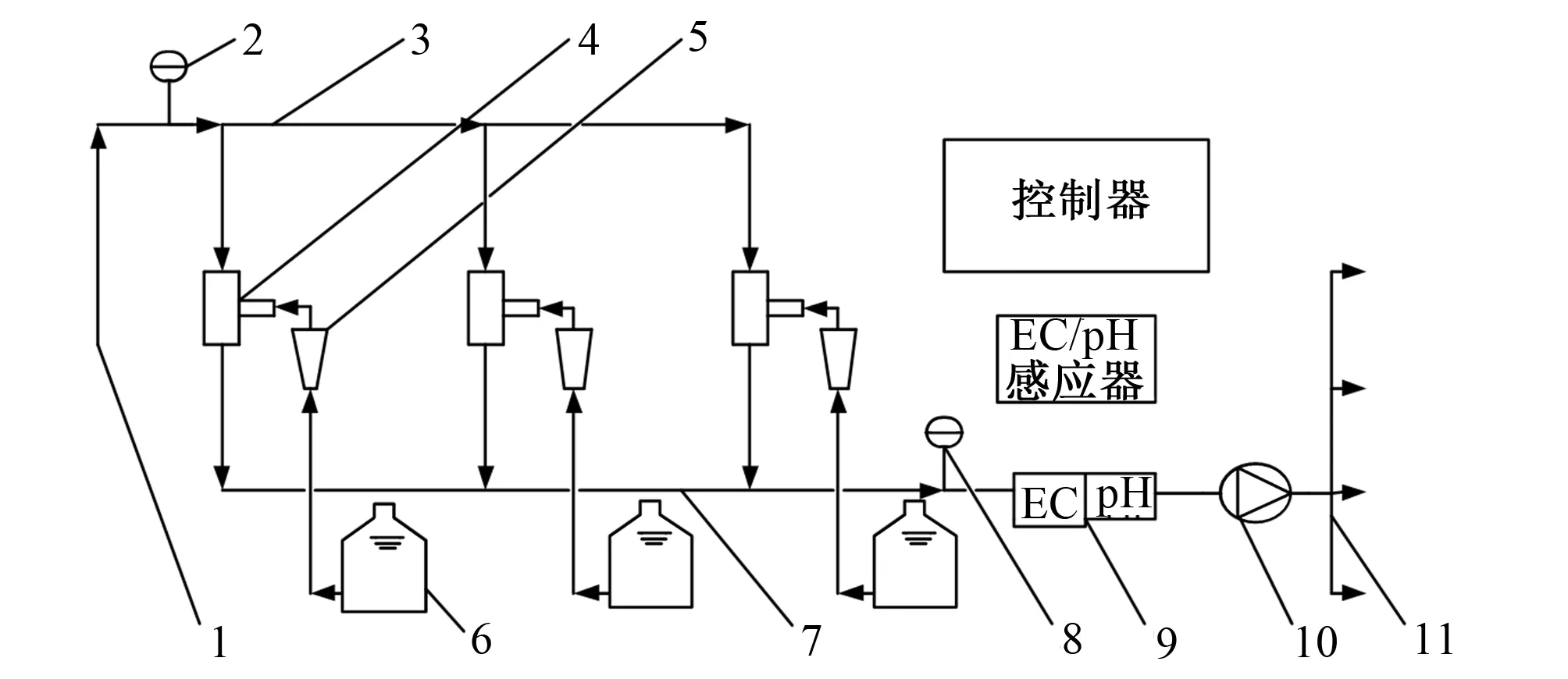
注:1-主管道注水口;2-上管道压力表;3-上管道;4-射流器;5-浮子流量计;6-液肥罐;7-下管道;8-下管道压力表;9-EC/pH感应器;10-抽吸肥泵;11-灌溉管网图2 运行原理图Fig.2 operating principle
2 关键部件设计
2.1 注肥系统
注肥系统由宝塔接头、浮子流量计、流量调节阀、电动阀及止回阀等部件组成,见图3。

图3 注肥系统结构示意图Fig.3 Schematic diagram of the injection system
注肥时,注肥系统的三通道可同时满足对3种不同类型单元素液肥的吸取。通过的流量调节阀实现对各通道流量的控制,浮子流量计对通道流量进行刻度显示;电动阀受控于控制系统,通过定时的通断进行对各通道自动定量的注肥[10];施肥机注肥系统中泵及电机反转时,会发生水肥混合液的导流,造成单元素液肥筒内溶液的污染,止回阀安装在注肥通道的末端,可有效防止水肥混合液的倒流[11]。
2.2 混肥系统
混肥系统由上下主管道压力表、射流器、EC/pH传感器、PVC变径三通及PVC管等部件组成,见图4。

图4 混肥系统结构示意图Fig.4 Mixed fertilizer system structure
混肥系统的设计基于射流器的并联,实现对不同类型单元素液肥的吸取及混合[12]。在施肥机工作运行中,混肥系统在主管道水泵的作用下进水口有恒压水流入,水流进入射流器喷嘴渐缩段处,随横截面积的减小,水流压强增大,水流速度也随之增大。由射流器的工作原理,吸入室产生的真空负压与外界气压形成压差,利用压强差将单元素液肥从与射流器吸肥口连接的储肥筒吸入吸肥系统,与水进行充分的混合,完成吸肥过程,再经水肥混合液出口排出[13]。
射流器工作原理与伯努利方程和连续性方程息息相关,公式如下[14]:
伯努利方程:
(1)
(2)
式中:z1为射流器进水口面水平高度,m;z2为射流器喷嘴面水平高度,m;p1为射流器进口流体压力,Pa;p2为射流器喷嘴流体压力,Pa;v1为射流器进口流体流速,m/s;v2为射流器喷嘴流体流速,m/s;ρ为流体密度,kg/m3。
连续性方程:
v1A1=v2A2=Q=常数
(3)
在标准大气压下,若不考虑射流器的水头损失,根据实际液体恒定流的连续方及能量方程推导得射流器吸肥量计算公式:
(4)
式中:q为射流器吸肥流量,m2/h;a为吸肥口截面积,m2;h为射流器吸肥口中心距肥液面的垂直距离,m;γ为流体体积力,N/m3。
显然,吸入流量随喉管处的真空度的变化而变化,当h+p2/γ<0时射流器才能吸肥。
2.3 控制系统
2.3.1 控制系统硬件设计
所设计旁路吸肥式水肥一体化施肥机控制系统硬件采用西门子PLC,通过逻辑程序控制各个执行机构实现水肥一体化施肥功能。控制系统选用西门子微型S7-200系列,其具有体积小、成本低等优点且足够满足本系统设计要求,接线原理见图5。EC/pH传感器采集的数据,需通过A/D模块转换成PLC的数字信号,此处选择西门子EM231接线原理见图6。执行元件为南京宁北阀门生产的DN15 24V电动阀,接收经单片机 D/A 转换后的电压信号。

图5 PLC接线原理图Fig.5 PLC wiring schematic

图6 西门子EM231接线原理图Fig.6 Siemens EM231 wiring schematic
2.3.2 控制系统结构原理
本系统有EC、pH传感器两个模拟量输入,以此检测主管道管路中水肥混合液的电导率和酸碱度;数字量输入有抽吸泵开启状态;数字量输出通过中间继电器控制抽吸泵开启、吸肥电动阀通断,硬件控制原理见图7。

图7 PLC硬件控制原理图Fig.7 PLC hardware control diagram
为了实现施肥机自动定量定比施肥,运用西门子PLC S7-200的STEP7- Micro/WIN软件进行编程;对施肥灌溉时间段采用脉冲的方式进行分配;运用组态王对通信参数进行相匹配的设置[15]。施肥机在工作过程中,通过上位控制计算机对施肥执行机构电动阀间接进行控制,运用浮子流量计对各通道对单元素液肥的吸肥流量进行显示,通过电动阀开启时间确定各通道的吸肥量,进而实现各通道自动定量施肥。
3 施肥机吸肥性能仿真分析
3.1 FloEFD软件简介
FloEFD是无缝集成于主流三维MCAD软件中的高度工程化的通用流体分析软件,它基于当今主流CFD软件都广泛采用的有限体积法(FVM)开发,FloEFD完全支持直接导入Pro/E, Catia, Solidworks, UGS-NX, Inventor等所有主流三维MCAD模型。广泛应用于机械行业、军工/航天航空行业、医疗器械行业、汽车行业,阀门管道等流体控制设备行业等[16]。
应用FloEFD对施肥机注肥系统及混肥系统进行了仿真分析,掌握其内部流场情况。通过对三通混肥系统的进水口、吸肥口及混合水肥出口边界条件设定,仿真分析混肥系统中速度流向、速度及压强等参数的变化情况。
3.2 边界条件参数设定及网格划分
仿真分析中,设定注肥通道吸肥口边界条件均为大气环境压力101 325 Pa;水肥混合出口边界条件设定抽吸泵的体积流量0.002 2 m3/s;注水口总压为0.4 MPa,见表2。

表2 边界参数设定Tab.2 boundary parameter settings
为了加快模型仿真分析的效率,因此在不影响分析准确性的前提下,对通过SolidWorks建立的三维模型做一定的简化,消除施肥机结构中的机架、控制柜、进出主管道、压力表及泵,运用边界条件来设置工作条件。计算区域选择整个注肥及混肥系统结构;网格划分采用六面体网格,在管道分岔处进行局部网格加密,总网格数887 131,网格划分见图8。
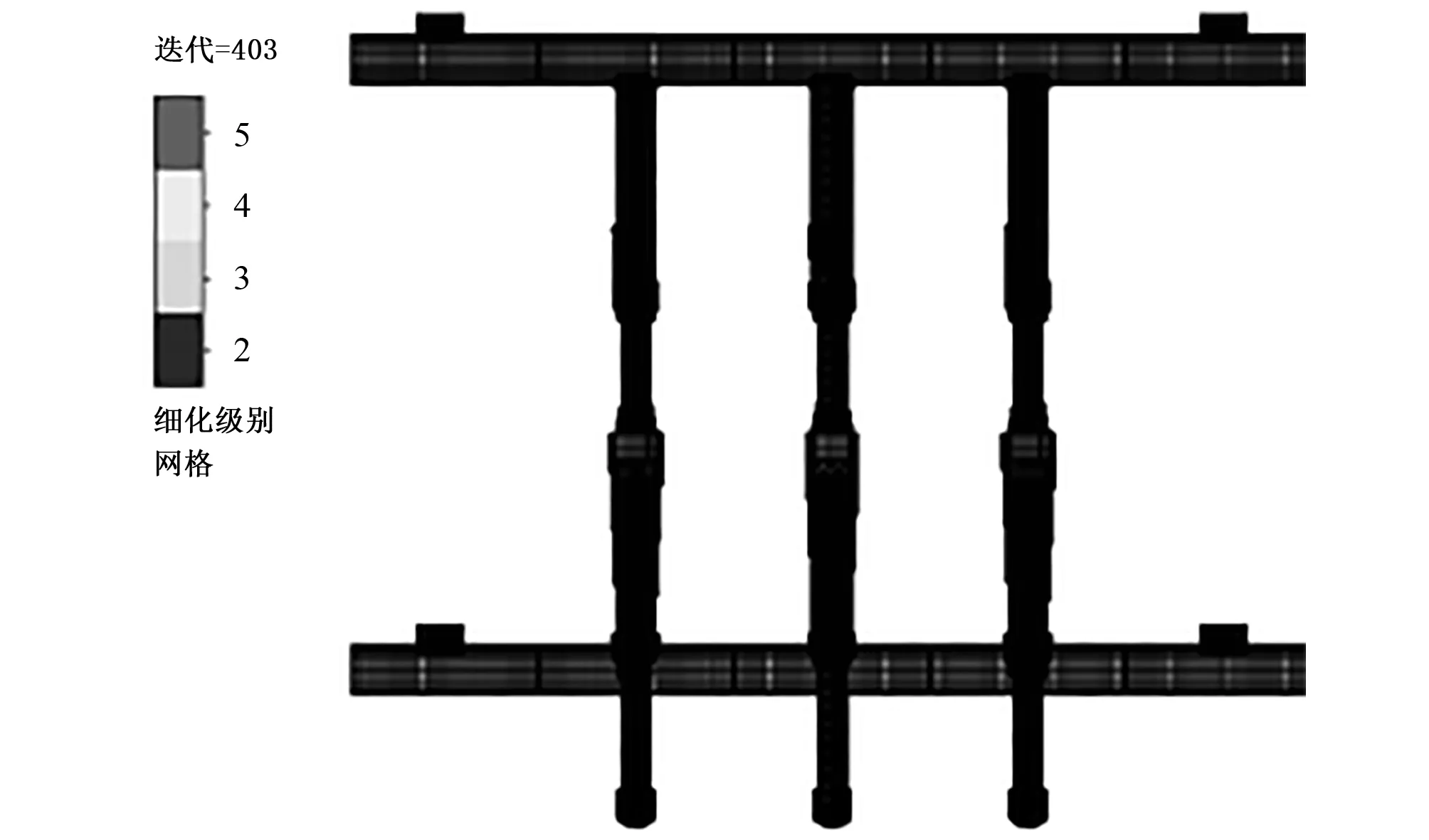
图8 网格划分Fig.8 Meshing
3.3 仿真分析及结果
完成上述边界参数设定及网格划分后,运用FloEFD进行仿真分析。流体分析求解器中目标收敛、迭代次数,流体分析中各注肥通道能够实现吸肥工作,能够达到与进水口进行水肥混合后稳定均匀输出的效果,满足设计要求。在分析结果中添加流动迹线进行流场展示,流动迹线压强、速度云图如图9和图10所示。
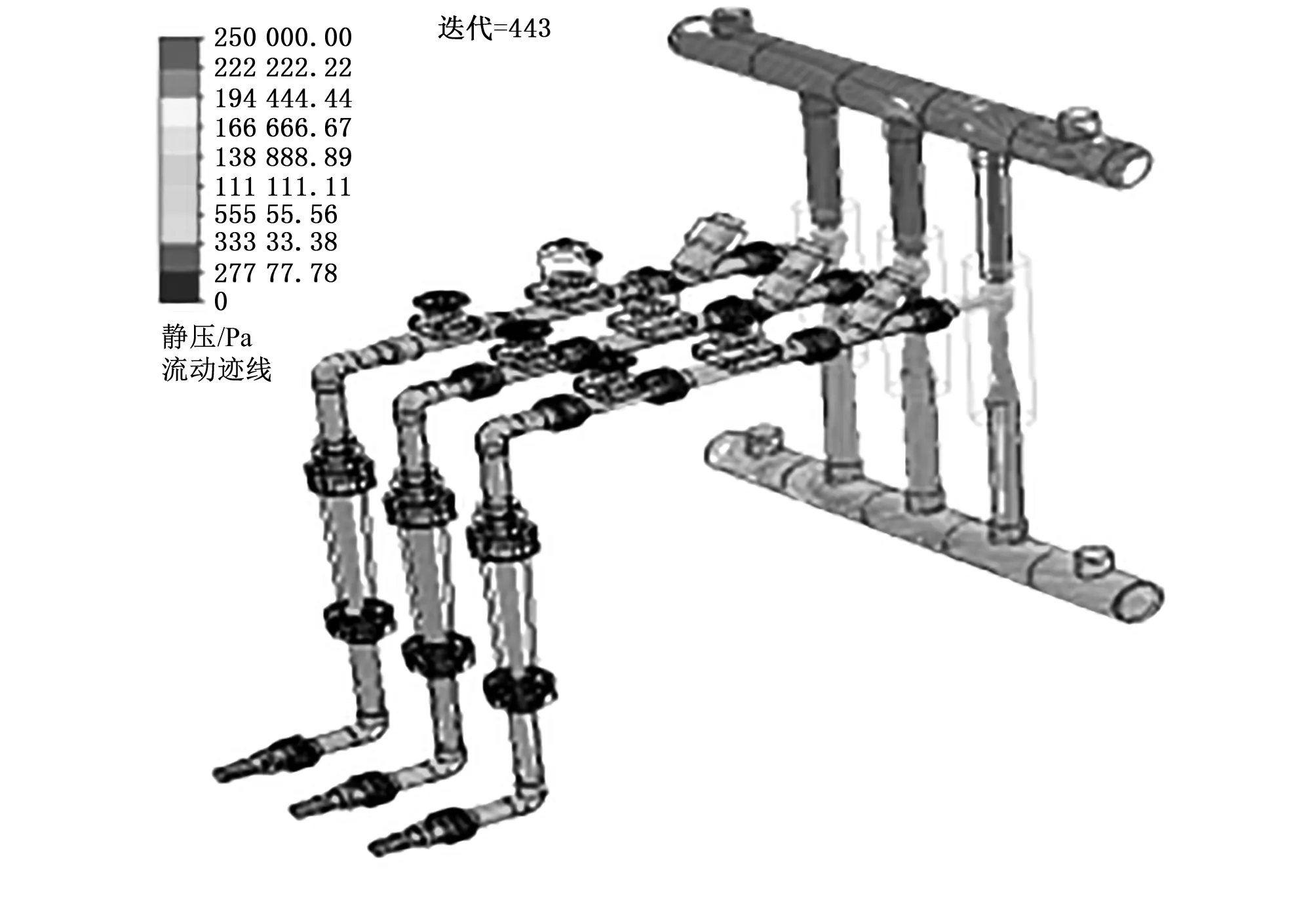
图9 施肥机流动迹线压强云图Fig.9 Fertilizer machine flow trace pressure cloud
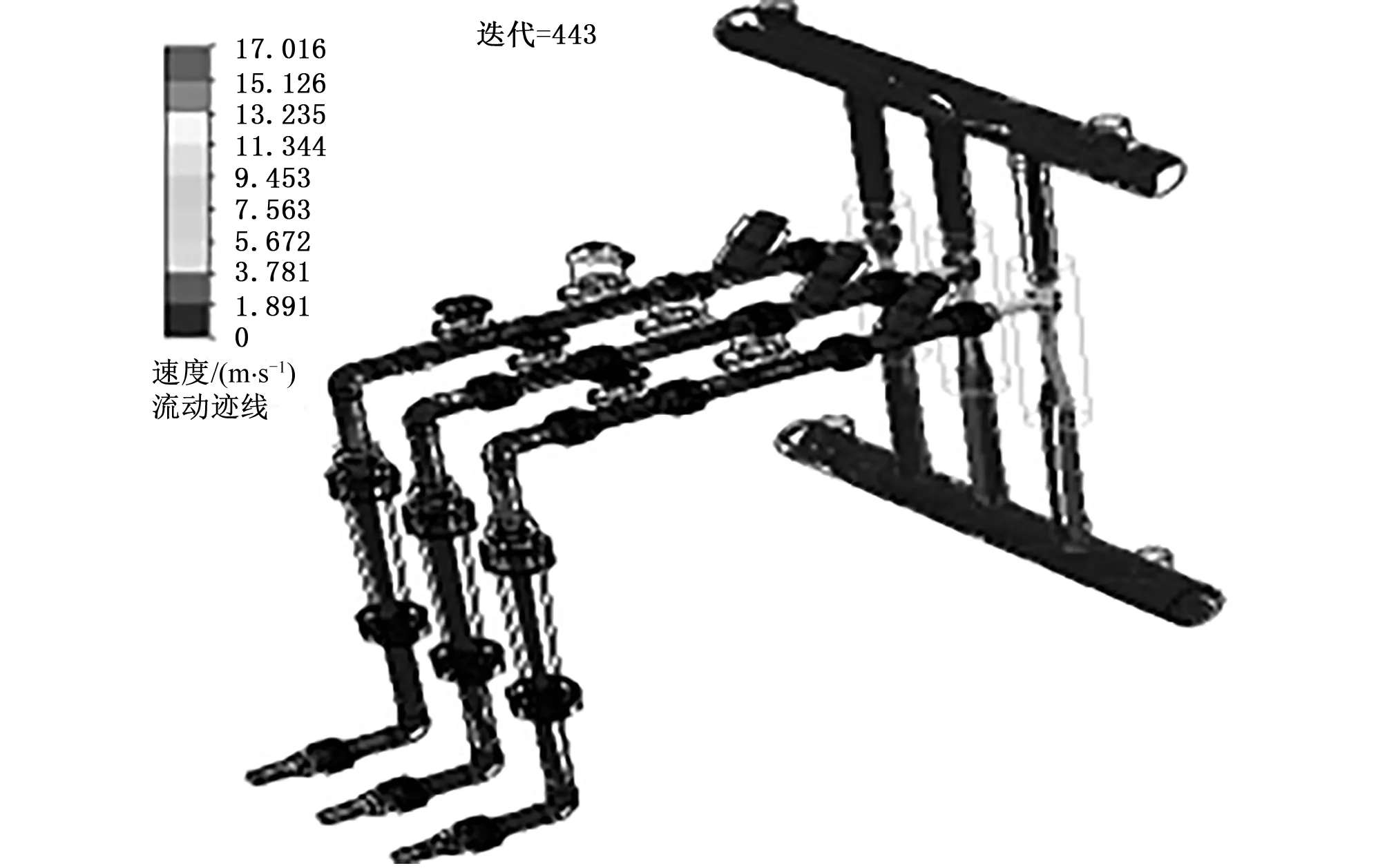
图10 施肥机流动迹线速度云图Fig.10 Fertilizer machine flow trace pressure cloud
从图9可以看出,施肥机混肥系统上主管道压强高于下主管道,从而使射流器进出口产生压差,符合射流器吸肥工作原理,满足各注肥通道吸肥设计要求。对比分析图9和图10施肥机混肥系统压强及速度云图,其压强及速度变化情况符合伯努利方程,进一步验证混肥系统性能的可行性。运用仿真分析结果表面参数,得到注水口及各注肥通道流量值,见表3。

表3 各通道仿真数值 L/hTab.3 simulation value of each channel
4 性能试验
4.1 试验装置
根据施肥机三维模型规格进行样机选型组装,综合考虑仿真分析各注肥通道吸肥量选择浮子流量计量程1 600 L/h,于2018年4月14日在贵州大学机械工程学院试验基地进行工作性能试验,见图11。

图11 三通道旁路吸肥式自动施肥机试验样机Fig.11 Three-channel bypass fertilizer fertilizer automatic test machine prototype
4.2 试验方法
试验时,将自动施肥机连接进水口管道、3个液肥储存筒及混合肥液出口管道,开启总电源和水泵按钮,启动施肥机。在启动电源总开关之前,首先将三吸肥通道上安装的手动阀调至全开状态、电动阀为常开状态,待三通道浮子均稳定后读取数据,并记录流量数据,重复测量4次,取其平均值作为最大吸肥量最终结果;其次,通过控制系统控制电动阀通断情况,观察施肥机各通道吸肥效果。
评价指标:系统稳定性、各通道最大吸肥量、三通道吸肥量均匀性、控制系统对电动阀的控制、试验数据与仿真数据吻合程度等。
4.3 试验结果与分析
试验中,施肥机中各项运行正常,各注肥通道能实现对单元素液肥均匀、连续的吸取,在混肥系统进行水肥混合后通过主管道输出。与图12所示的水肥一体化施肥机自动运行模式相结合,在注肥通道上实现自动的定量施肥,实现现代农业水肥一体化灌溉施肥。
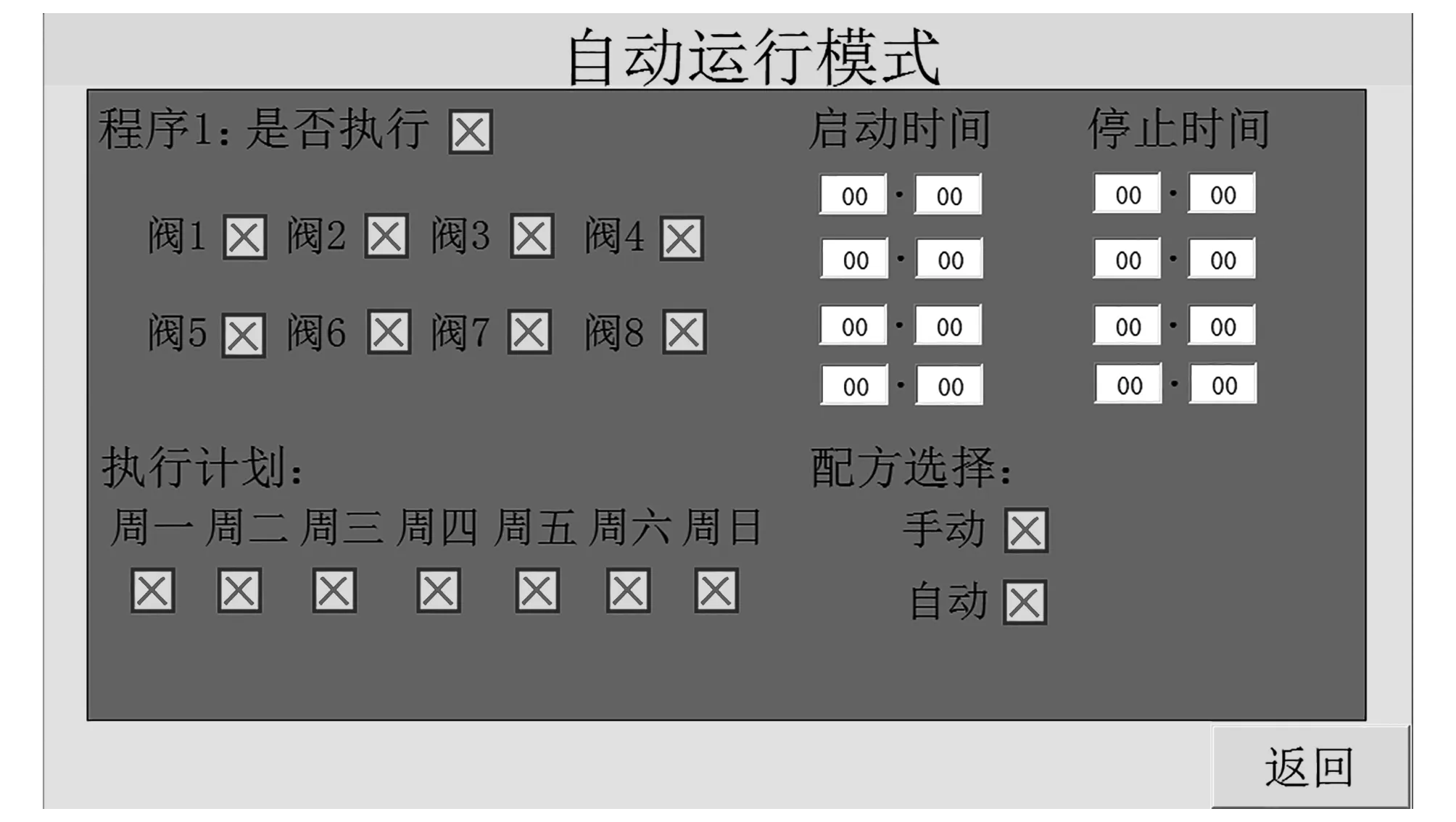
图12 水肥一体化施肥机自动运行模式Fig.12 Fertilizer automatic operation mode of water and fertilizer integration
对比试验所测数据与仿真分析所得数据,通过分析两组数据的吻合程度,检验三维结构仿真分析的准确性,验证该模型是否具有现实意义。通过上述测试试验,现将4次重复测量记录的吸肥量读数与仿真分析所得数据进行对比[17],建立表4。
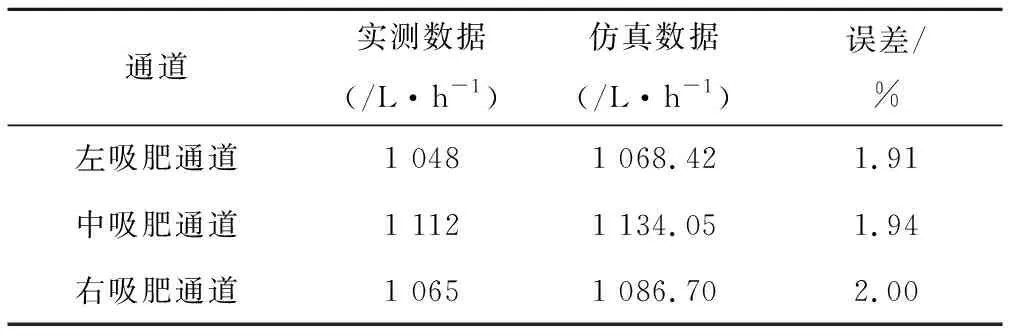
表4 吸肥量仿真值与试验值对比表Tab.4 Fertilizer absorption simulation value and test value comparison table
5 结 语
(1)运用SolidWorks对施肥机关键部件注肥系统、混肥系统及进出主管道的等部件进行结构设计,并进行虚拟样机的装配,建立了施肥机三维模型。
(2)运用FloEFD对施肥机进行水肥混合性能仿真分析,验证了所设计的施肥机具有良好的水肥混合效果,且获得了三通道旁路吸肥式自动施肥机实际工作中不易取得的流场参数及可视化图像。通过对比压力及速度云图,验证了射流器的吸肥工作原理。
(3)试验中,三通道旁路吸肥式自动施肥机各项运行正常,各注肥通道吸肥量稳定均匀,达到多种单元素液肥水肥一体化混合后稳定输出的效果。试验实测数据与仿真分析数据吻合程度较高,达到验证此研究可行性目的。
(4)试验中,该三通道旁路吸肥式施肥机控制系统相结合,可实现自动的定量施肥,实现了现代水肥一体化灌溉模式,在高效节水现代农业灌溉方面具有一定推广应用意义。
