解决需求可拆分车辆路径问题的先聚类后路径方法
2018-11-26闵嘉宁陆俐君
闵嘉宁,金 成,陆俐君
(1.无锡太湖学院,无锡 214064;2.南京大学 管理学院,南京 210093)
0 引言
需求可拆分车辆路径问题SDVRP(Split Delivery Vehicle Routing Problem)松弛了经典VRP中对每个客户只能访问一次的约束[2]。这种松弛使得一个客户的需求可以由多辆车送货,或由一辆车多次送货;也就是说,当车辆的剩余容量不足以为某个客户提供完整的送货需求时,车辆仍然可以向该客户提供与车辆剩余容量相等的送货,而客户的剩余需求可以由其他车辆(或此辆车的下一次)提供送货。这样可以充分利用车辆的容量,降低使用的车辆数、减少碳排放和行驶距离,进一步优化车辆路径问题。因此,SDVRP一经提出,迅速成为VRP的一个重要分支,受到越来越多的关注[2]。
国外关于算法的研究正式开始于1989年,Dror和Trudeau[1]提出了一种局部搜索算法,并验证了当客户点的送货需求较大时,SDVRP的解决方案明显优于VRP。Belenguer等[3]为SDVRP构建了多面体模型,基于切平面法设计了一种混合算法;他们解决了规模相对较小的问题,取得了良好的效果。Archetti等[4,5]提出了一种TSA算法和基于这个TSA的改进的三阶段算法。Chen等[6]首先通过节约算法得到初始解,然后通过拆分客户点的需求改进路径。Jin等[7]提出了带有效不等式的两阶段算法。Jin等[8]提出了基于列生成算法的SDVRP混合启发式算法。Tan[9]设计了蚁群算法,实例验证表明,随着点需求/车辆容量的比例增加,需求分解的优势也随之增大。Gulczynski等[10]提出限制最小拆分需求量,开发了一个端点混合整数算法、通过一种增强的记录到记录的旅行算法进行求解。Aleman等[11,12]提出了自适应记忆算法和变量邻域TSA算法,并验证了后者优于前者。Archetti等[13]提出了列生成的精确算法,先把问题域分割成较小的子域,然后在子域中优化路径,试图缩小精确算法和启发式算法获得的最优解的差距。Wilck IV等[14]开发了一种SDVRP求解的构造启发式算法,计算结果表明,在行驶距离和计算速度方面性能优于列生成方法和两阶段法。
国内研究开始的比较晚,但是近年来关注度逐年提高。2006年谢毅[15]设计了一个用于求解SDVRP问题的禁忌搜索算法(TSA)和一个遗传算法(GA),案例分析表明,TSA在最优解和时间消耗方面优于GA。侯立文[16]采用了具有改进转移概率的最大-最小蚂蚁系统,设计了求解过程和分割点选取规则。孟凡超等[17]研究了TSA来解决这个问题。谢秉磊等[18]提出了蚁群算法。刘旺盛等[19,20]提出了k-means聚类算法,并设计了两种不同的算法:一种是先分组后路径;另一种方法是先路径后分组,比较表明,先分组后路径的方法有更好的性能。马华伟[21]建立了多时间窗的SDVRP数学模型,设计了一种改进的蚁群算法求解问题。汪婷婷[22]提出了基于反应阈值和求解刺激值的SDVRP问题的蜜蜂群体优化模型。向婷等[23]提出了一种“分组而后路径”的聚类算法:根据最近原则分组,通过设定分割阈值来限制车辆的负载达到一定的范围,并且使用蚁群优化算法来安排路线。
本研究领域中使用的大多数算法是启发式和元启发式方法,为了找到最优解,需要多次迭代和结果比较而后取优,虽然可以获得较优的行驶距离,但是计算过程非常耗费时间。为了解决这个问题,本文提出了一个 “先聚类后路径”算法:首先,根据最近原则对客户点按距离进行聚类;然后,采用“推出”和“拉入”操作,通过对客户的需求拆分,调整每个聚类的负载需求,在没有迭代的情况下获得最佳的重量平衡的聚类组;最后,采用禁忌搜索方法对聚类组中的路径进行优化。这样,可以在较短的时间内获得近优解。该算法将在减少计算时间和获得较优的行驶距离方面更具实用价值。
1 数学模型

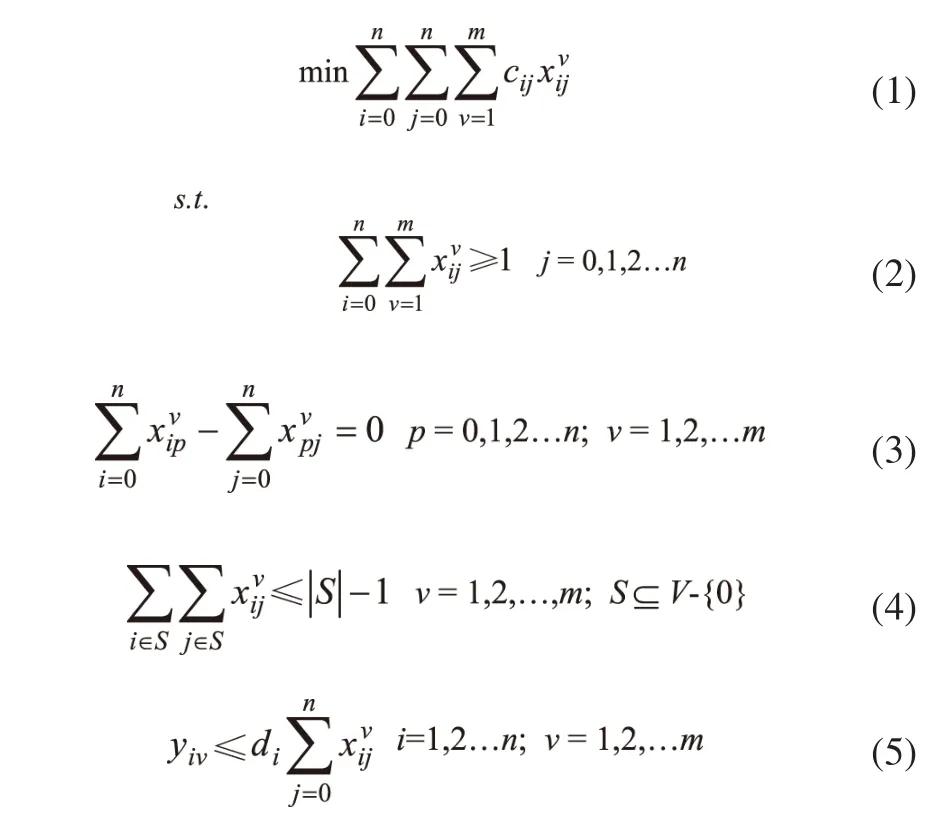

式(2)描述了每个客户点至少被访问一次;式(3)是流守恒约束;式(4)是子路径消除约束;式(5)描述了只有当车辆v访问客户i时,车辆v才服务客户i;式(6)保证了满足所有客户需求;式(7)保证每辆车不超载;式(8)描述了当车辆v从i直接到j时,=1;否则,=0;式(9)描述了yiv是车辆v为点i 送货的重量。
2 CRTS算法描述
该算法是一种基于先聚类后路径策略的三阶段算法CRTS(The Clustering first Routing later based Three Stage Algorithm)。第一阶段——对客户进行分组:根据其地理位置,采用最大最小距离聚类方法对客户点进行分组。第二阶段——调整每组的重量:采用“推出”和“拉入”操作,根据每个点的负载需求调整各组的重量,确定每个组的客户点。“推出”是将一个组的额外重量推给那些重量小于Q的邻组;“拉入”是从重量超过Q的邻组中提取重量到重量小于Q的组中。第三阶段——优化组内路径:采用搜索算法优化组内路径。该算法的具体过程如下。
2.1 前期处理
对负载需求di>Q(i=1,2,…,n) 的客户点单独处理。di=Q的负载需求由一辆车进行送货,该点剩余的重量(di=di-Q)(i=1,2,…,n)以及其他的点di<Q进入CRTS算法。
2.2 对客户分组
1)最大最小距离聚类算法的基本思想
最大最小距离聚类方法是一种模式识别方法。首先,按照最远距离原则,选择相距最远的点作为聚类中心,以提高初始数据集的分割效率[24]。然后,根据最近距离原则,将所有距离最近的点就近归入聚类组。
2)最大最小距离聚类的执行过程
Step1:令车场为x1作为第1聚类中心z1;
Step2:计算各点i(i =1,2,…,n) 到z1的距离Di1;
Step3:当Dk1=max{Di1},选取xk作为第2聚类中心z2;
Step4:计算各点i(i=1,2,…,n)到z1和z2的距离Di1和Di2;
Step6:假如z3存在,计算Dl=max{min(Di1, Di2, Di3)}(i=1,2,…,n),以及Dj>θ*D12,选取xj作为第4聚类中心z4;以此类推,直至Dj≤θ*D12;
Step7:按照最小距离原则,划分所有的点构成组;终止运行。
2.3 调整各组的负载重量
客户点聚类分组后,计算并调整各组的负载重量。
1)“推出” 操作的执行过程
Step1:假如一个组的负载重量wg在 [α*Q, Q]之间,而且只有两个点,那么这两个点就形成一条路径,其中α大于负载率小于1;假如有µ1个这样的组,那么就有µ1条路径;
Step2:假如一个组的负载重量wg在[Q, 2*Q]之间,而且只有两个点,那么基于Q、这两个点就形成一条路径,剩余的负载wg-Q转入步骤4;假如有µ2个这样的组,就形成了µ2条路径;

2)“拉入” 操作的执行过程
Step1:按顺序访问负载重量wg<Q的组(例如,组A);
Step2:寻找距离A组中心点i最近的邻组点t(例如,组B中的点t);
Step3:如果点t的负载重量dt>(Q-wgA)且B组的负载重量wgB>Q,拆分点t成为t1和t2,移动dt2=Q-wgA到组A,保留dt1=dt-(Q-wgA);
Step4:如果点t的负载重量dt=(Q-wgA)且B组的负载重量wgB>Q,移动(合并)点t(dt)进入组A;
Step5:如果点t的负载重量dt<(Q-wgA),首先,移动(合并)点t(dt)进入组A;如果B组的负载重量wgB>Q,则在B组中搜索最近的点t',让t<-t';如果wgB<Q,则在另一个相邻的B'组中搜索最近的点t'',让t<-t'';最后,进入步骤4;
Step6:如果A组的负载重量wgA为[α*Q, Q],则结束对组A的处理;如果wgA< α*Q,则转到步骤2;
Step7:所有组访问完毕,则终止 “拉入”过程;否则,重复“拉入”过程。
2.4 优化组内路径
执行完“调整各组的负载重量”后,问题域被划分为几个较小的子问题域——聚类组,因此可以采用许多成熟的搜索算法来进行组内路径优化,获得最优解。本文采用禁忌搜索算法。限于篇幅,本文不讨论这个问题。
3 案例研究
为了验证CRTS算法的可行性和有效性,采用来自文献[7,19,23]的案例,并与采用先聚类后路径策略相应的算法TSVI[7]、k-means聚类方法[19]、拆分阈值的聚类方法[23]以及扫描算法[25]进行比较。实验是在Intel (R)核心处理器、8GB内存的Windows 7 64位机器上实现的。
3.1 案例组1
案例组1来自文献[7]。案例组1包含有三个实例(N7L1-N7L3),各实例的客户数都是N=7,车辆最大载重量为1,车场坐标(0,0);实例中客户点的位置以及各实例中22次执行 (Q1-Q22) 的送货需求分别见文献。

表1 CRTS与TSVI计算结果比较
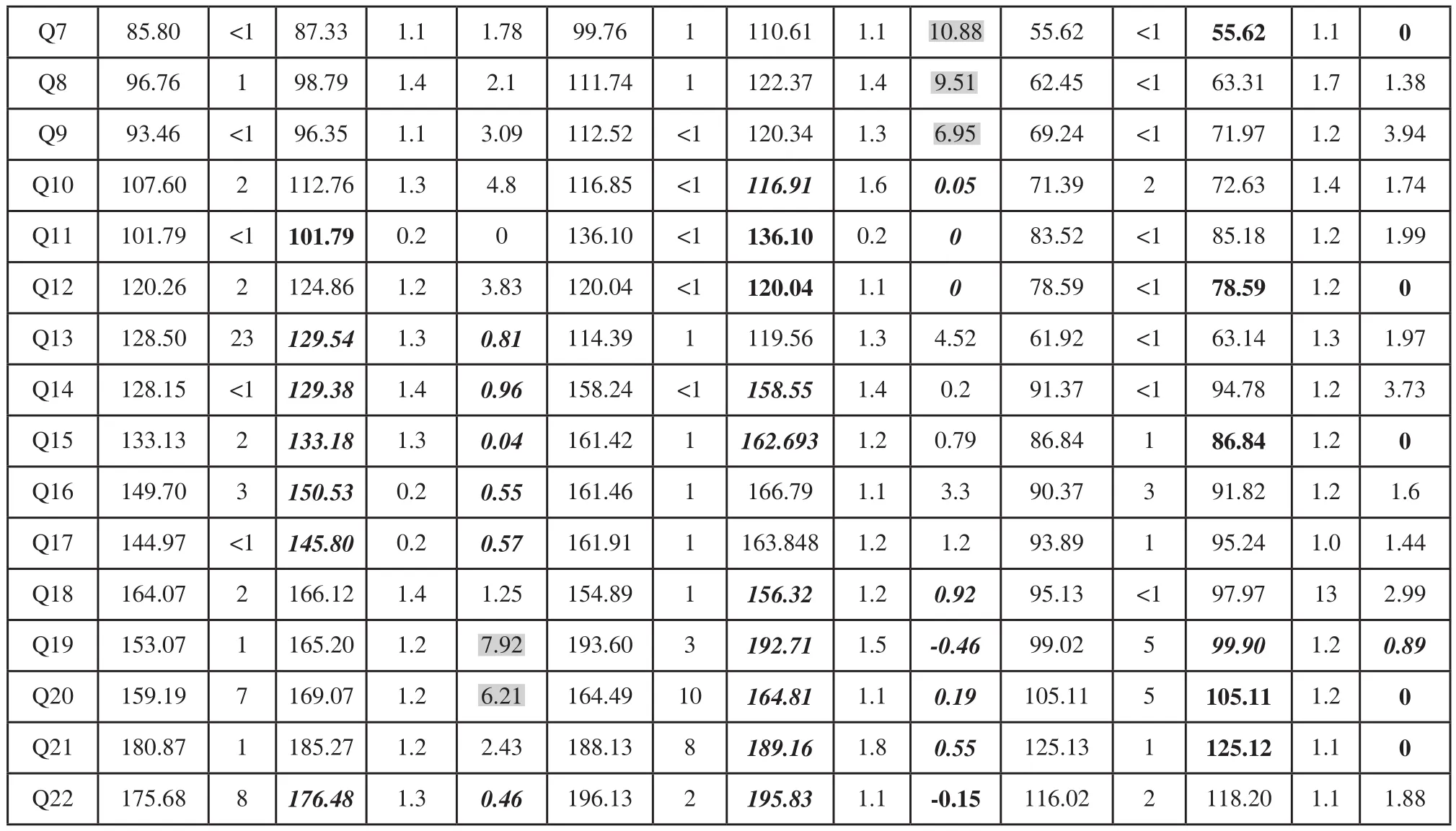
续(表1)
表1比较了TSVI和CRTS算法的总行驶距离(Distance),计算所消耗的CPU时间s(T),以及CRTS与TSVI总行驶距离相比较的相对偏差百分率RDP (Relative Deviation Percentage):RDP=((DistanceCRTS-DistanceTSVI)/ DistanceTSVI)*100%。由于计算所消耗的CPU时间s很小,为节省显示空间,表1中计算时间(T)一栏表示的数字是CPU时间s的100倍。加粗字体表示其RDP≤0.0%,粗斜体表示其0.0%<RDP<1.0%,涂灰的数字表示其RDP>5.0%。RDP≤0.0%和0.0%<RDP<1.0%的次数占总66次执行的46.97%;涂灰的数字占总66次执行的12.12%。
案例组1三个实例执行的总行驶距离结果如图1所示,两种不同算法曲线的吻合度很好,表明CRTS算法是可行的、有效的,尤其是计算所消耗的CPU时间s远低于TSVI。
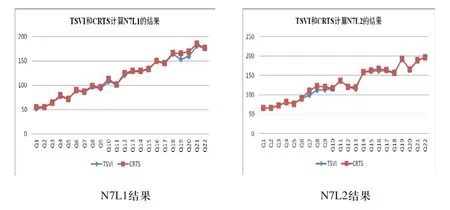

图1 案例组1三个实例的计算结果
3.2 案例组2
案例组2中四个实例来自文献[19,23]。各实例的客户数,客户总需求量,车辆最大装载量,所需车辆数如表2所示。各实例的客户位置、需求以及车场位置等基本信息见文献。

表2 案例组2各实例的基本信息

表3 CRTS与K-means聚类算法、拆分阈值聚类算法和扫描算法计算结果比较

图2 案例组2四个实例的执行结果
表3比较了K-means聚类算法、拆分阈值聚类算法、扫描算法以及CRTS的总行驶距离(Distance),计算所消耗的CPU时间(T),以及CRTS分别与这些算法在总行驶距离和计算所消耗的CPU时间s比较的相对偏差百分率为RDP(Dis.)(RelativeDeviationPercentageforDistan ce)和RDP(T),RDP(Dis.)=((DistanceCRTS–Distance某算法)/Distance某算法)*100%,RDP(Dis.)=((TimeCRTS–Time某算法)/Time某算法)*100%。表3中CRTS的计算结果采用了加粗字体。CRTS分别与前3种算法比较的RDP(Dis.)和RDP(T)的值都是百分率;正值表示CRTS的值大,负值表示CRTS的值小,凡负值涂有灰色。
表3显示:1)从总行驶距离来看,N=15、N=20和N=50三个实例中拆分阈值聚类算法最低,分别比CRTS低0.815%、4.067%和4.39%;N=36实例的CRTS最低,比拆分阈值聚类算法低0.805%;2)从计算所消耗的CPU时间s来看,CRTS最低,N=15、N=20、N=36和N=50实例分别比拆分阈值聚类算法低27.82%、30.37%、20.40%和58.51%。图2清晰表明:CRTS算法是可行的、有效的;图2(a)的曲线显示了N=20、N=36和N=50三个算例的总行驶距离的差别范围比较小,可以取得较好的总行驶距离;图2(b)显示CRTS的计算所消耗的CPU时间s远低于其他3种算法。
4 结论
本文介绍了SDVRP的数学模型,其目标函数是使用最低数量的车辆、通过安排合适的路线尽量减少总行驶距离。为了实现该目标,本文基于“先聚类后路径”方法提出了三阶段算法CRTS:第一阶段,采用最大最小距离聚类的方法对客户点域进行聚类,按照使用最小车辆数的原则将所有客户点分成子域,形成聚类组;第二阶段,采用“推出”和“拉入”操作,根据车辆最大负载重量Q值调整各组的负荷需求,获得重量平衡的聚类组;第三阶段,优化各组的路径,最小化总行程距离。两个案例组7个实例70次运行结果表明,CRTS算法为SDVRP提供了可行、有效的解决方案。该算法在总行驶距离的路径安排中可以取得较好的结果,尤其在计算时间方面,性能优于本文选用的TSVI算法、k-means聚类方法、拆分阈值聚类方法以及扫描算法等。