相对水平度无线差分测量系统对时方案设计∗
2018-11-26刘爱东王鹏超
刘爱东 王鹏超
(海军航空大学 烟台 264001)
1 引言
相对水平度无线差分测量系统是一种以差分测量方式测量分布于舰船不同位置处的各装备基准面之间的相对水平度的无线传感器网络[1]。
在舰船航行或系泊状态下,受船体摇摆影响,对相对水平度测量只能通过差分测量方式测量,而差分测量方式需要对同一时刻测量数据进行差分,此时系统内时钟的不同步会造成测量误差,这要求系统能够维持一个全局一致的时钟。
本文通过对GPS(Global Positioning System)外部对时[2]、NTP(Network Time Protocol)网络时间协议[3]和PTP1588时钟同步协议[4]等传统的时钟同步方法的使用环境、同步精度等因素的比较,最终选择使用PTP1588时钟同步协议。
2 对时精度需求分析
2.1 系统总体精度要求
相对水平度无线差分测量系统主要应用于舰船水平对准工作,根据国家相关标准要求,用于对准的测试设备工作精度至少要达到被标设备工作精度的1/3。
目前市场上单台水平仪对水平度的测量精度一般可以达到2″,对两平面之间相对水平度测量精度即为4″,因此要求时间同步精度影响的测量精度在2″以上[6]。
对准工作要求海况风力小于3级、海况小于4级。在此海况下,舰船最大摇摆幅度为±0.5°,最短摇摆周期为 6s[7]。
舰船装备基准面水平度φ可以近似看做满足正弦函数φ=0.5×sin(×t)+φ。当基准面水平度0处于φ=φ0周围时角度变化速率达到最快,相同时间同步精度下由于时间不同步造成的测量误差也达到最大。此时,角度误差值2″对应的时间误差约为1ms。因此,时间同步精度要求为1ms。
2.3 对时精度要求
造成系统时钟不同步的原因包括对时不准确和守时时钟漂移。
守时时钟精度取决于晶振的准确度,目前市场上通用晶振的准确度可以达到 ±1×10-7,即±0.1μs/s。在不考虑对时精度情况下,当系统运行时间达到2.7h,累计误差将达到1ms,系统必须重新对时,以保证同步精度合格[8]。
为尽量减少对时次数,一次对时精度越高越好,最低要求对时精度应达到微秒级。
GPS同步方式无法在甲板以下工作,不适用于本系统应用环境要求。NTR是一种低成本的时钟同步方案,但其同步精度较低,只能达到毫秒,不适用于本系统对高精度时钟同步的需求。PTP1588时钟同步协议提供了以较低成本实现亚微秒级同步的方案,满足系统需求。
水平对准包括辅基准对准,基座对准,设备对准,平台罗经、惯导平台对准,其中辅基准对准精度要求最高,按照GJB 1233A-2008中5.2.1要求,舰船基准平台水平度偏差应不大于30″,辅基准与主基准偏差应不大于20″,因此要求系统总测量精度应高于6 ″[5]。
2.2 同步精度要求
3 PTP 1588协议
3.1 基本同步原理
PTP系统采用主从层次式结构,通过主时钟节点与从时钟节点之间同步、跟随、延时请求、延时响应4种类型的同步协议报文传输,获取从时钟相对于主时钟的偏差(offset)和传输延时(delay),并进一步对从时钟校准,适用于网络环境稳定的本地化局域网环境[9]。
其实现机制如图1所示,从时钟节点利用主时钟节点传输的T1、T4时间和自身记录的 T2、T3时间计算从时钟相对于主时钟的偏差和传输延时。这里假定同步报文与延时请求报文的传输延时相同,即路径是对称的。
从时钟相对于主时钟的偏差和传输延时计算公式为
3.2 时钟模型
PTP 1588协议中规定了五种时钟类型:普通时钟(Ordinary Clock,OC)、边界时钟(Binary Clock,BC)、端到端透明时钟(End to End Transparent Clock,E2E TC)、点对点透明时钟(Peer to Peer Transparent Clock,P2PTC)和管理节点[10]。
3.3 延时测量机制
PTP1588提供了两种延时测量机制:延时请求-响应机制和同等延时机制。延时请求-响应机制常常用于包含E2E的网络,因此通常称为E2E延时测量机制;同等延时机制常常用于包含P2P的网络,因此通常称为P2P延时测量机制。
在采用E2E延时测量机制的网络中,只在从时钟计算路径总延时,网络内其他端口均不计算延时。也就是说在E2E延时测量机制中,延时报文交互是在主时钟和每个从时钟间进行的,每个从时钟都向主钟发送延时请求报文,主钟对每个从时钟回答延时响应报文。
在采用P2P延时测量机制的网络中,每条链路的两个端口都计算本链路延时。也就是说在P2P延时测量模式中,延时报文交互是在每条链路的两个端口间进行的。
4 相对水平度无线差分测量系统
4.1 系统组成结构及工作流程
相对水平度无线差分测量系统主要功能为完成系泊或航行状态下舰船各设备基准面之间相对水平度的差分测量。系统由数据采集模块、数据传输模块和数据处理模块三部分组成,其中数据传输模块又分为终端、路由和协调器数据传输模块。
其组成结构如图4,相对水平度测量过程如下:
1)数据采集模块通过水平仪采集所测平面的水平度数据,并通过守时时钟采集对应的时间信息数据。
2)数据采集完毕后,通过有线方式将数据传递给终端数据传输模块,终端数据传输模块进行数据融合和转发,将数据传输到协调器数据传输模块。
3)协调器数据传输模块转发数据至数据处理模块,数据处理模块在接收到数据后通过笔记本电脑对数据进行差分处理。
该系统要求系统中所有终端节点维持一个全局统一的时间标准[11],能够对分布于不同位置的水平仪采集到的数据在终端处加上准确的时间戳。
4.2 系统网络特点
PTP1588协议要求应用于网络环境稳定、安全的局域网。相对水平度无线差分测量系统是一种层次结构、网络节点固定的分布式无线传感器网络。
其网络特点如下:
1)采用星型网络拓扑结构,具有明确的中心节点。
2)中心节点与特定终端节点间有唯一确定的链状传输路径。
3)路径上各节点相对位置固定,运行后设备个数固定,不会随时投入退出,因此不需要频繁对时。
4)不同传输路径上的路由节点相互独立,即针对特定的路由节点仅有唯一的上一级节点和下一级节点与其进行数据交互。因此不存在通信路径之间的PTP报文环。
5)所有节点硬件参数指标可视为一致,且路由节点仅完成数据转发功能。
6)正向转发与反向转发路径可视为对称。
7)各节点通信速率较低,串口通信波特率为9600bps,空中速率为2400bps。
8)系统对时工作单独进行,不存在PTP事件报文与其他报文间的相互影响,网络流量负载波动少,时间抖动小。
根据其网络特点可以看出,相对水平度无线差分测量系统网络拓扑较为稳定很少变化,很适合用PTP1588进行时间同步。
5 PTP协议在系统中应用
5.1 建立主从体系
PTP系统采用主从层次式结构,从时钟节点根据时钟报文调整到主时钟节点时间。
本系统只存在一个域,选择中心节点作为主时钟节点,终端节点作为从时钟节点,因为域中只有一个主时钟,因此主时钟即为最高主时钟。
5.2 时钟模型选择
为消除路由节点存在的延时抖动现象,路由节点一般选择为边界时钟或透明时钟。
边界时钟通过逐级对时的方法减小延时抖动,0透明时钟通过测量驻留时间,并写入报文校正域来减小延时抖动。
边界时钟方法会造成对时的时间开销增加。透明时钟方法造成PTP报文长度增加,在低速率网络中也会显著增加对时开销。
在相对水平度测量系统中,路由节点不与多个路径共享,对时时路由节点只为对时事件报文服务,又可以通过对报文格式设计,使报文长度保持一致,达到每个对时事件报文通过路由节点的时间不变的目的,将延时抖动控制在可接受范围之内。此时,可直接将路由节点看成链路的一部分,此时可将驻留延时和链路延时统一考虑。
5.3 延时测量机制选择
由于相对水平度测量系统中逻辑上将路由节点看做链路一部分,不存在多于两个的其他端口,因此选择延时请求-响应机制,将驻留延时和链路延时统一考虑,只在主从时钟处计算路径总延时。
5.4 时间戳获取方法
时间戳的获取误差也是影响对时精度的一个重要因素[12]。时间戳的获取分为两种情况,一种是接收到报文的时间戳点的时间戳获取,另一种是发送报文的时间戳点的时间戳获取。
设计中系统采用16位内部计数器计数+16位软件计数,共32位计数值作为本地的时钟值。选取E32-TTL-500无线模块来进行数据的收发。
该模块在收到数据包后,模块AUX口输出低电平,并延迟5s后,开始将无线数据通过串口TXD引脚发出,在接收报文时,利用无线模块所产生的中断信号来触发获取当前时钟计数器的值。当接收缓存区输出最后一位数据时,模块将AUX输出高电平,利用该引脚此时输出的上升沿产生接收中断,获取此时间戳点的时间戳。
在发送报文时,利用计时满时产生的计数器溢出中断,将当前计数器值写入发送数据中,立即发送。利用此种方法每次时间戳获取的时刻点抖动非常小,可以较为精确地获得数据发送前一时刻和刚接收到数据的时刻,从而能保证本设计最终得到较高的同步精度。
5.5 PTP报文设计
PTP1588规定所有报文都应具有报头、报体和报尾,报尾长度可以为0,报头长度34字节[13]。
该报文对路由节点速率有较高要求,在低速率网络中会显著增加对时时间,显然不适合本系统。如在本系统中每增加一个字节的报文长度,就会造成在每个路由节点上的驻留时间增加大约70ms,在有共n个路由节点的系统中对时时间至少会增加n×3×70(ms),如增加对时精度校验,则时间开销增加会更多。为使报文适应本系统要求,对PTP报文进行裁剪,重新设计。
本系统应用有同步、延时请求、延时响应3种类型的同步协议报文,为使所有报文经过路由节点驻留时间相同,要求每种类型报文长度相同。所有对时报文应用统一格式。

表1 报文格式
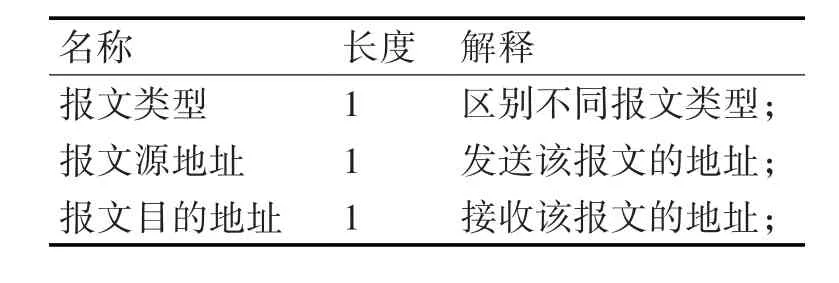
表2 报头格式
6 误差分析
6.1 通信通道的对称性
从同步原理可以看出,从时钟相对于主时钟的偏差和传输延时计算都是建立在转发路径可视为对称的假设基础上。
本系统虽然对设备进行了针对性设计,尽可能减小通信通道的不对称性,但由于多径效应、设备硬件差异等因素的影响,仍会对对时精度造成一定影响。
6.2 时间戳的准确性
在PTP协议中共需要获取四次时间戳值,包括两次接收到报文的时间戳点的时间戳获取,两次发送报文的时间戳点的时间戳获取。
由于不同节点上无线模块和晶振时钟存在差异,获取的时间戳也会存在误差,最终导致对时误差。
7 结语
本文对PTP 1588协议的工作原理、时钟模型和延时测量机制等关键点进行了分析,并根据网络特点和对时精度需求对PTP 1588协议在相对水平度无线差分测量系统的应用进行了研究设计。
PTP 1588是一个通用的时间同步协议,在特定系统中的应用应根据此系统的网络特点和对时精度需求,选取合适的机制和参数,对不满足系统需求的部分应进行针对性改进设计。