便携式土壤湿度检测装置用于精准灌溉决策系统
2018-11-23杨春曦谢可心杨启良
杨春曦,刘 华,谢可心,杨启良
便携式土壤湿度检测装置用于精准灌溉决策系统
杨春曦1,刘华1,谢可心1,杨启良2
(1. 昆明理工大学化学工程学院,昆明 650500;2. 昆明理工大学现代农业工程学院,昆明 650500)
采用最先进的技术进行精准灌溉是现代农业发展的必然趋势,但在准确预测被监测区域的土壤湿度时,面临一个两难的处境:少量土壤湿度固定检测点不能良好地反映作物区域土壤墒情信息,而大量布置传感器检测点又使得投资成本较大。因此该文设计了一种便携式土壤检测装置,同时基于该装置构建了一个精准灌溉决策系统,并把该系统应用于田间的精准灌溉决策。该系统由便携式土壤湿度检测装置和上位机决策软件2部分组成,其中便携式土壤湿度检测装置由FDR原理土壤水分传感器MS-10、低功耗单片机C8051F410、蓝牙无线传输模块、数据显示模块以及部分外围电路组成,可以独立实现时间记录、数据存储和实时显示。经过试验标定,装置的允许最大误差为2.2%,设计精度为95%;上位机决策软件分为数据接收模块、分布式二进制一致性算法模块和系统操作界面3个子模块,分别采用Visual Basic、Matlab和Matlab GUI设计而成,实现对便携式装置所采集数据的无线传输、归一化处理和数据融合处理,能够根据不同区域划分和不同作物灌水下限进行相应的运算,从而得到估计精度较高、区域大小可调的多尺度精准灌溉决策信息。最后通过30 m×30 m草坪的土壤湿度为检测参数的田间验证,该系统的平均决策准确率大于90%,且可以根据需要增减检测点个数。因此既可以独立应用,也可以作为固定检测方式的有效补充,实现作物区域土壤湿度信息的精确采集,有效提高水资源利用率。
灌溉;土壤水分;温度;精准灌溉;便携式;检测装置;决策系统
0 引 言
随着精准农业的推广与深化,转变农田的粗放型灌溉方式,实现农业用水的精细化管理,是农业可持续发展的必然选择[1-2]。中国农田灌溉总体有效利用系数约为0.516,节水潜力巨大[3]。目前的节水灌溉技术中,主要从灌溉方式和土壤湿度控制2个方向进行研究。常见的节水灌溉方式有微润灌溉[4]、亏缺灌溉[5]、痕量灌溉[6]、控制性根系分区交替灌溉[7]和膜下滴灌[8]等;采用精准灌溉的常见农作物有水稻[9]、土豆[5]与棉花[10]等;自动化灌溉技术有基于地理信息系统[11]、单片机[12-14]、无线传感器网络[15-16]等硬件系统的电磁阀开关控制[12-15]、PID控制、模糊智能控制[17]等方式。农业自动化节水灌溉技术研究对促进农业发展具有现实性意义。
土壤水分含量对作物的生长有着重要影响,合适的水分含量是作物良好生长的重要条件,因此以土壤湿度为被测参数的节水灌溉系统一直是研究热点。张增林等[12]基于MSP430单片机和CC2530射频模块设计了节水灌溉系统,采用10个无线传感器节点和10个阀门节点对系统进行了测试,验证了通信距离13 m以内具有较好的控制效果。郭英芳[13]基于AT89S51单片机设计了自动化节水灌溉系统,根据作物对土壤湿度的需求设定阈值,当土壤湿度低于设定值时即进行浇水灌溉。赵斌等[14]基于STC12C5A08S2D单片机设计一种自动化节水灌溉系统,布置多个传感器节点实现作物区域的覆盖度,采用设定阈值的方式进行灌溉控制,并将采集到的土壤墒情数据经无线方式上传到上位机供用户监测。陈艳丽等[15]设计了基于ZigBee的智能节水灌溉系统,根据土壤墒情信息是否低于设定阈值进行自动灌溉,并将采集到的信息无线方式传输到PC终端供用户查看。贾科进等[16]设计了基于ZigBee无线传感器网络的土壤墒情检测系统,通过对土壤温湿度、空气温湿度、光照强度的检测,将数据上传到控制中心进行分析处理,然后下达是否灌溉指令到电磁阀实现闭环控制。
文献[12-15]均设计了土壤自动浇水灌溉系统,其中每个检测节点均对应一个电磁阀,一旦节点出现故障或检测精度不够准确,将可能出现系统误动作。鉴于单个传感器检测的土壤墒情数据不足以代表整个作物区域的湿度分布情况,故上述方式无法准确估计作物区域的土壤湿度墒情。在文献[16]中,为了实现对土壤湿度、大气温度等多个环境参数的实时采集,需要实时检测并传输大量的数据,从而导致无线传感器节点的耗电量较大。因此,这里设计了一种便携式土壤湿度检测装置,采用移动检测的方法,可以辅助原检测系统为上述文献中的自动化节水灌溉系统提供更详细的区域湿度变化情况,从而提高其决策的准确性;也可以作为独立精准灌溉系统的检测部分,能够充分采集作物区域的土壤墒情信息,并与上位机决策软件组成分布式土壤湿度决策系统,实现对土壤湿度墒情的准确预测,为精准灌溉提供决策支持。
1 精准灌溉决策系统总体设计
精准灌溉决策系统设计共分为便携式检测装置设计、上位机数据接收程序设计和分布式决策程序设计3部分。为了便于对系统的各功能模块进行调试,设计时采用了模块化思想,把上位机决策程序(包括上位机数据接收程序和分布式决策程序)分为6个功能子模块,相应的功能子模块方框图如图1所示。
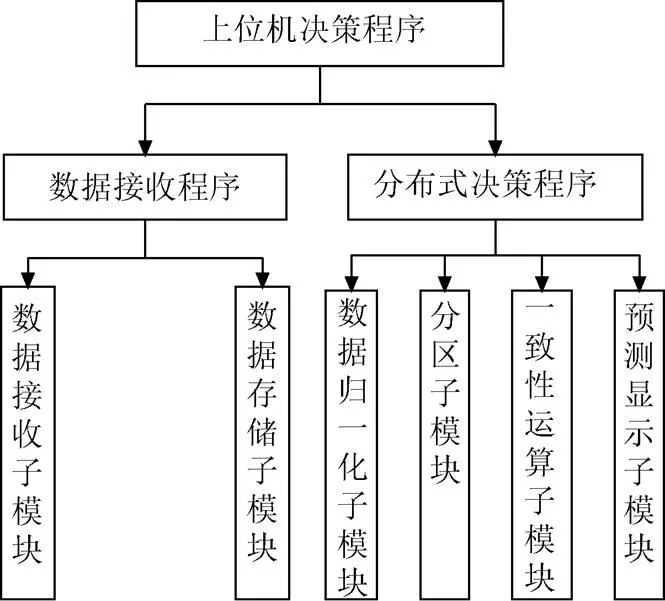
图1 功能子模块框图
首先,便携式土壤湿度检测装置根据作物区域监测规划对土壤湿度进行检测,将检测到的数据通过蓝牙模块无线传输至上位机数据接收程序。上位机数据接收程序分为数据接收子模块和数据存储子模块,其中数据接收子模块用于接收便携式土壤湿度检测装置发送来的土壤湿度数据;数据存储子模块将接收到数据保存为excel文件,供用户查阅分析。上位机决策程序中数据归一化子模块用于读取excel文件数据,并根据作物湿度需求下限值对数据进行归一化处理,转换为二进制数据;分区子模块根据监测规划对作物区域检测数据进行分区;一致性运算子模块采用改进的分布式二进制一致性算法[9-13]对属于不同区域的二进制数据进行数据融合,判断被监测区域总体或分区是否需要灌溉,并把结果送至决策显示子模块予以显示。
1.1 便携式土壤湿度检测装置设计
便携式土壤湿度检测装置由FDR原理的土壤水分传感器MS-10、信号放大模块、C8051F410低功耗单片机、CH452按键扫描和数码显示控制芯片、DS1302时钟芯片、数码显示模块和蓝牙通信模块组成,其中电源模块为一节Drie Auge 18650型可充电锂电池,直流电压为3.7 V,电容量为2 800 mAh。装置结构如图2所示。

图2 便携式土壤湿度检测装置结构图
1.1.1 便携式土壤湿度检测装置硬件设计
土壤湿度检测装置微控制器采用C8051F410单片机,其机器周期由标准的12个系统时钟周期减为1个系统时钟周期,因此比标准的8051结构指令在执行速度上有很大的提高,峰值性能达到25MIPS(百万指令/秒,Million Instructions Per Second)。该装置在设计时使用了出厂已经校准的24.5±2%MHz内部振荡器,并配置两对滤波电容对单片机工作电压和A/D转换基准电压进行滤波设计,连接管脚2的为单片机复位电路,短接JRS可以复位单片机。传感器模拟信号配置为模拟输入,其他外围设备管脚根据其具体功能予以配置,主控芯片的原理如图3a所示。
为了更好地采集能够反映土壤湿度的时间、空间特性的数据,本装置设计了实时时钟电路,用于记录数据的采集时间,进而分析土壤湿度时空变化规律,提高节水灌溉的精确性,时钟电路原理图如图3b所示。

图3 便携式土壤湿度检测装置的主控芯片及时钟电路图
时钟电路采用DS1302时钟芯片,是DALLAS公司推出的涓流充电时钟芯片,具有宽范围的工作电压2.0~5.5V。在装置开机时,装置电源作为时钟供电方式,装置关机时,使用3.6 V纽扣电池作为时钟电源。该芯片具有300 nA的低功耗,因此续航能力较强。
1.1.2 便携式土壤湿度检测装置的软件设计
便携式土壤湿度检测装置的主体程序采用C语言编写,程序首先进行硬件和时钟的初始化,然后进入主函数。为了实现实时显示,主函数里构建了一个无限循环用于快速刷新LED显示数码管。装置的软件程序流程如图4所示。

图4 便携式土壤湿度检测装置的程序流程图
土壤湿度传感器输出0~2 V电压信号经采集电路处理后送入单片机进行A/D转换,转换为数字信号后,计算出相应的湿度值并实时显示。装置设计有土壤湿度数据采集按键和数据发送按键,湿度采集按键用来记录数据;数据发送按键则在检测结束后发送检测的数据,配置W25Q64 FLASH存储芯片,具有64Mbit存储空间,足够数据存储使用;数据传输采用无线蓝牙通信方式,避免了相对复杂的有线传输方式。
1.2 精准灌溉决策系统上位机软件设计
1.2.1 精准灌溉决策系统上位机软件总体流程
本着界面设计易懂、实用的基本原则,尽量减少界面的操作流程,并给予足够的提示信息。上位机数据接收程序使用VB语言编写,主要负责与便携式土壤湿度检测装置进行无线连接,并接受装置采集的数据。上位机数据接收程序流程如图5a所示。
上位机操作界面使用MATLAB GUI工具进行编写。首先打开存储的excel文件并读取土壤湿度数据,根据作物对土壤湿度的需求值设定灌水下限值进行数据归一化,然后调用具有强扩展性的一致性算法子模块进行预测,判断整体区域或分区是否需要灌溉,相应程序流程如图5b所示。

图5 上位机精准灌溉决策系统流程图
1.2.2 分布式二进制一致性算法设计
1)分布式二进制一致性算法原理
分布式一致性算法是一种用于对大规模数据进行有效融合的算法,其核心思想是通过相邻传感器检测点之间的数据交换和计算,最终实现所有检测点的参数值达到一致[18-22],因为该算法不需要知道全局信息,所以具有并行计算、扩展性好、鲁棒性强等特点。而分布式二进制一致性算法式是分布式一致性算法的特例,即传感器检测点之间所传输的数据只有“0”或“1”2个状态。在土壤湿度决策过程中,该算法把采集到的所有检测点的土壤湿度与设定的土壤湿度下限值进行比较,小于则取状态值为“1”,反之则为“0”;相邻的传感器检测点所采集的数据通过相互分享状态值,按照如下步骤进行计算,即可对整个区域是否需要灌溉进行准确估计。




③当被监测区域中各传感器检测点的状态值遵循以下3种属性[18]之一,即出现
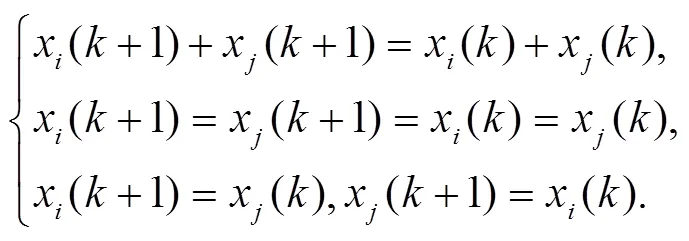
时,则判定系统达到间隔一致,计算结束;否则返回步骤①循环计算,直到满足步骤③条件或超出规定循环次数为止(估计失败)。
④令小于0.25的状态值等于0,大于0.75的状态值等于1,即可进行决策:状态值为“1”则认为被监测区域缺水,反之则认为被监测区域不缺水。
2)分布式二进制一致性算法仿真测试
整个算法按照上述步骤进行迭代,经过一段时间后即可得到被监测区域缺水与否的准确估计。该算法采用遗传算法[23-25]进行优化后,其仿真准确率大大提高。

图6 优化后的准确率统计
由图6知,算法的估计准确率随着检测点数的增加而增加,当检测点数大于63时,算法的估计准确率都将超过98%。
2 便携式土壤湿度检测装置标定与田间试验
2.1 便携式土壤湿度检测装置室内标定
土壤湿度传感器多采用烘干法进行标定[26-30],为不失一般性,本文设计的便携式土壤湿度检测装置也采用烘干法进行标定。由文献[31]知,温度每变化1℃对传感器输出只有大约1.914 mV的影响,所以温度对湿度测量的准确性影响较小,因此本设计中未考虑温度补偿措施。
在烘干法试验中,土壤质量含水率计算公式为

式中表示土壤质量含水率;m为容器质量和土壤湿质量之和,g;m为容器质量和土壤干质量之和,g;m为容器质量,g。
便携式土壤湿度检测装置的标定采用云南红壤土,去除颗粒和杂质,过筛孔径0.9 mm,烘箱使用DGG-9123A型电热恒温鼓风干燥箱,电子秤型号YP100001,测量精度0.1 g。具体标定步骤如下:
1)将处理好的土壤置于烘箱于105 ℃条件下烘干12 h,冷却2 h后取出;
2)称取土壤干质量,装入直径为10 cm,高为8.5 cm的不锈钢杯中,并将土壤均匀压实,按1.16 g/cm3容重配置9份样品;
3)依次向样品加水,每个样品加水量递增25 mL水,然后静置12 h,分别称湿质量,计算土壤质量含水率理论值,并记录试验数据;
4)将探针充分插入待测样品,测取土壤湿度传感器输出电压值,观察数码管显示的读数,并记录试验数据;
5)根据土壤湿度标定值进行最小二乘拟合,作出拟合曲线,并根据标定值和拟合曲线上对应的值标定检测装置的精度;
6)重复步骤1)~4),验证检测装置的可靠性。
根据烘干法所得到的标定值和基于标定值进行最小二乘法拟合得到拟合曲线如图7所示,其中拟合曲线上的星型点表示对应于标定值的拟合值。

图7 实验室土壤湿度标定值与拟合曲线
考虑到土壤湿度传感器的精度和单片机有限的计算能力,这里选择4次多项式拟合,所得的电压值(, V)与土壤质量含水量(, %)的换算公式如式(5)所示。

结合公式(5)和步骤6)所获得的相关测试数据计算结果可知,土壤湿度质量含水率标定值与拟合曲线基本吻合,最大绝对误差2.2%,按量程为0~53%计算,则所设计装置检测精度大于95%。
2.2 便携式土壤湿度检测装置田间试验
考虑到实验室条件过于理想,因此有必要进行田间抽样测试以检验该装置能否应用于田间这类非理想环境。整个抽样过程按照检测装置插入测试点测量、环刀取样、烘干法标定的顺序进行。试验所得的田间实测数据和烘干法称质量所得标定数据如表1所示。

表1 田间测试土壤湿度标定值与测量值对比
在进行田间试验时,便携式土壤湿度检测装置测定的土壤湿度质量含水量和烘干法得到的标定土壤湿度质量含水量的误差大小,可以用均方根误差RMSE(root mean square error)来衡量[32]。其计算方式为

将表1中第2列所示的检测电压代入式(5)中计算出的土壤湿度质量含水量的测量值,依次填入表1的第1列,然后按照式(6)计算出均方根误差RMSE为2.18%,而由装置95%精度算出允许误差为±2.65%,即均方根误差小于允许误差。因此,该便携式土壤湿度检测装置符合标定的精度,说明该装置能够胜任田间等野外区域的土壤湿度数据采集工作。
3 精准灌溉决策系统验证
系统测试对象为昆明理工大学图书馆前草坪。由于设置灌溉方式为圆形自旋转微喷灌溉,因此,依据草坪形状和喷头位置可将草坪分为4个分区域,对草坪整体区域进行土壤湿度检测和自动分区决策,检测点布置为30 m×30 m的正方形,分区后每个区域检测点布置为15 m×15 m的小正方形,检测点均匀分布于整个区域,平均3 m左右1个测点,总计为100个检测点,实现了对作物土壤湿度检测的全面覆盖,为正确决策提供保障。
设草坪每个检测点为分布式二进制一致性算法的1个节点,节点之间的通信半径为9 m,则所有检测点组成1个分布式网络;在4个分区中,令节点的通信半径为5 m,节点之间的拓扑连接形式4个分布式子网络。
便携式土壤湿度检测装置把指定位置的检测数据通过蓝牙方式发送至上位机,并存储为相应的excel文件,上位机决策软件中的分布式二进制一致性算法分别根据整体区域、分区域拓扑连接对检测数据进行同步运算。
经过为期1个月的跟踪测试(1次/d),从30组数据中选择出5组分别对图书馆前草坪的检测数据进行总体和分区决策。为测试决策系统结果的准确性,这里采用决策系统结果与专家统计结果对比的方式来进行。专家统计结果的统计规则为“被监测区域状态值为“1”的检测点之和与被监测区域所有检测点之和的比值的百分数”。当统计结果的值大于或等于50%即判定被监测区域为“缺水”,反之则判定为“不缺水”。对比结果如表2所示。

表2 决策系统测试结果与专家统计结果对比
注:“1”与“(1)”分别代表被决策系统和专家判定为缺水,而“0”与“(0)”分别代表被决策系统和专家为不缺水。
Note: “1” and “(1)” denote water shortage judged by decision system and experts respectively, while “0” and “(0)” denote not short of water judged by decision system and experts respectively.
由表2可知,根据5次检测数据进行决策的结果与专家统计结果完全吻合,系统决策准确无误。综合30次的结果来看,平均准确率达到90%以上,其中第3次预测结果如图8所示。

图8 上位机决策界面
在图8中,左1图表示数据归一化后检测点的缺水状态分布,红色圆圈为缺水,蓝色星为不缺水;左2图表示整体决策结果为“不缺水”;图8右侧有2行2列共计4张图分别为4个分区的决策结果,其中图中分区1、分区2、分区3的决策结果均为“不缺水”,而分区4的决策结果显示为“缺水”状态。即第1、2、3分区不缺水,可以暂不进行灌溉,而第4分区缺水,需要进行灌溉。综上所述,该算法可以从整体和局部2种尺度为用户提供灌溉决策建议,为实施节水灌溉提供了有效支持。
4 结 论
本文设计了一种可用于精细化农田节水灌溉决策的土壤湿度精准灌溉决策系统。通过便携式湿度检测装置采集数据,结合上位机的分布式二进制一致性融合算法,能够实现对被监测区域土壤湿度缺水情况的多尺度预测。经过实验室测试和田间实际验证得到如下结论:
1)便携式土壤湿度检测装置包含土壤湿度数据实时显示、数据存储、土壤湿度采集灯光提示、蓝牙模块无线传输数据等功能,使用方便、操作简单;
2)便携式土壤湿度检测装置运行稳定、数据传输可靠,最大误差为2.2%,设计装置检测精度为95%,符合实际检测需要。
3)决策系统界面友好、操作方便,系统算法运行稳定、决策结果准确。在检测点数大于63时,仿真试验平均决策准确率达到98%,田间试验的平均决策准确率超过90%。
该节水灌溉预测系统预测精度较高、便携性好、可扩展性强、有利于在精细化节水灌溉领域进行推广应用。
[1] 黄玉祥,韩文霆,周龙,等. 农户节水灌溉技术认知及其影响因素分析[J]. 农业工程学报,2012,28(18):113-120.
Huang Yuxiang, Han Wenting, Zhou Long, et a1.Farmer cognition on water-saving irrigation technology and its influencing factors analysis[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2012, 28(18): 113-120. (in Chinese with English abstract)
[2] 王旭,孙兆军,杨军,等. 几种节水灌溉新技术应用现状与研究进展[J]. 节水灌溉,2016(10):109-112
[3] 赵文杰,丁凡琳. 我国节水灌溉技术推广现状与对策研究综述[J]. 节水灌溉,2015(4):95-98.
Zhao Wenjie, Ding Fanlin. A review on the current situation and countermeasures of water-saving irrigation technology extension in China[J]. Water Saving Irrigation, 2015(4): 95-98. (in Chinese with English abstract)
[4] 牛文全, 薛万来. 矿化度对微润灌土壤入渗特性的影响[J]. 农业机械学报,2014,45(4):163-172.
Niu Wenquan, Xue Wanlai. Effects of mineralization degrees on soil infiltration under moistube-irrigation[J]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(4): 163-172. (in Chinese with English abstract)
[5] El-Abedin T K Z, Mattar M A, Alazba A A, et al. Comparative effects of two water-saving irrigation techniques on soil water status, yield, and water use efficiency in potato[J]. Scientia Horticulturae, 2017(225): 525-532.
[6] 陈琳,田军仓,王子路. 痕灌技术研究现状及展望[J]. 农业科学研究,2015,36(3):52-56.
Chen Lin, Tian Juncang, Wang Zilu. The research status and the future development of trace quantity irrigation technology[J]. Journal of Agricultural Sciences, 2015, 36(3): 52-56. (in Chinese with English abstract)
[7] 康绍忠,潘英华,石培泽,等. 控制性作物根系分区交替灌溉的理论与试验[J]. 水利学报,2001,32(11):80-87.
Kang Shaozhong, Pan Yinghua, Shi Peize, et a1. Con-trolled root-divided alternative irrigation-theory and experiments[J]. Journal of Hydraulic Engineering, 2001, 32(11): 80-87. (in Chinese with English abstract)
[8] 刘梅先,杨劲松,李晓明,等.滴灌模式对棉花根系分布和水分利用效率的影响[J]. 农业工程学报,2012,28(增刊1):98-105.
Liu Meixian, Yang Jingsong, Li Xiaoming, et al. Effects of drip irrigation strategy on cotton root distribution and water useefficiency[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2012, 28(Supp.1): 98-105. (in Chinese with English abstract)
[9] Rejesus R M, Palis F G, Rodriguez D G P, et al. Impact of the alternate wetting and drying (AWD) water-saving irrigation technique: Evidence from rice producers in the philippines[J]. Food Policy, 2011, 36(2): 280-288.
[10] Feng L, Dai J, Tian L, et al. Review of the technology for high-yielding and efficient cotton cultivation in the northwest inland cotton-growing region of China[J]. Field Crops Research, 2017, 208: 18-26.
[11] 刘柯楠,吴普特,朱德兰,等. 基于GPS 的太阳能平移式喷灌机自主导航系统设计与试验[J]. 农业工程学报,2016,32(16):89-94.
Liu Kenan, Wu Pute, Zhu Delan, et al. Design and experiment of autonomous navigation system for solar poweredlinear move sprinkler machine based on GPS[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(16): 89-94. (in Chinese with English abstract)
[12] 张增林,韩文霆. 自动化控制在节水灌溉系统中的应用[J]. 节水灌溉,2012(10):65-68.
Zhang Zenglin, Han Wenting. Application of automatic control in water saving irrigation system[J]. Water Saving Irrigation, 2012(10): 65-68. (in Chinese with English abstract)
[13] 郭英芳. 单片机技术在农田节水灌溉系统中的应用[J]. 陕西农业科学,2015,61(6):93-95.
[14] 赵斌,范学佳,衣淑娟,等. 旱田节水灌溉智能监控系统的研究[J]. 中国农机化学报,2016,37(7):174-178.
Zhao Bin, Fan Xuejia, Yi Shujuan, et al. Research on dry field water-saving irrigation intelligent monitoring system[J]. Journal of Chinese Agricultural Mechanization, 2016, 37(7): 174-178. (in Chinese with English abstract)
[15] 陈艳丽,谢芳. 基于ZigBee的农田智能节水灌溉系统的设计[J]. 中国农机化学报,2017,38(2):81-83.
Chen Yanli, Xie Fang. Design of intelligent water-saving farmland irrigation system based on ZigBee[J]. Journal of Chinese Agricultural Mechanization, 2017, 38(2): 81-83. (in Chinese with English abstract)
[16] 贾科进,王文贞,杜太行,等. 基于ZigBee无线传感器网络的土壤墒情监测系统[J]. 节水灌溉,2014(3):69-71.
[17] Peng X, Liu G. Intelligent water-saving irrigation system based on fuzzy control and wireless sensor network[C]// Fourth International Conference on Digital Home. IEEE, 2012: 252-256.
[18] Draief M, Vojnovic M. Convergence speed of binary interval consensus[J]. Proceedings-IEEE Infocom, 2009, 50(50): 1-9.
[19] Abdaoui A, Elfouly T M. Distributed binary consensus algorithm in wireless sensor networks with faulty nodes[C]// Gcc Conference and Exhibition, 2013: 495-500.
[20] Mostofi Y, Malmirchegini M. Binary consensus over fading channels[J]. IEEE Transactions on Signal Processing, 2010, 58(12): 6340-6354.
[21] Abdaoui A, El-Fouly T M. TOSSIM and distributed binary consensus algorithm in wireless sensor networks[J]. Journal of Network & Computer Applications, 2014, 41: 451-458.
[22] Al-Nakhala N, Riley R, Elfouly T M. Binary consensus in sensor motes[C]//Wireless Communications and Mobile Computing Conference. IEEE, 2013: 1337-1342.
[23] 刘玉梅,魏欧,黄鸣宇,等. 应用改进的遗传算法优化软件产品线特征选择[J]. 小型微型计算机系统,2017,38(1):35-39.
Liu Yumei, Wei Ou, Huang Mingyu, et al. Feature selection optimization based on atomic est and genetic algorithm in software product line[J]. Journal of Chinese Computer Systems, 2017, 38(1): 35-39. (in Chinese with English abstract)
[24] 范莎. 无线传感器网络的分布式快速一致性滤波[D]. 昆明:昆明理工大学,2016.
Fan Sha. Distributed Fast Consistency Filtering for Wireless Sensor Networks[D]. Kunming: Kunming University of Science and Technology, 2016. (in Chinese with English abstract)
[25] 张鹏,冯旭祥,葛小青. 基于改进遗传算法的多天线地面站硬件资源分配方法[J]. 计算机工程与科学,2017,39(6):1155-1163.
Zhang Peng, Feng Xuxiang, Ge Xiaoqing. A hardware resource allocation method for multi-antenna ground station based on improved genetic algorithm[J]. Computer Engineering & Science, 2017, 39(6): 1155-1163. (in Chinese with English abstract)
[26] 唐玉邦,何志刚,虞利俊,等. 土壤水分传感器(FDR)在作物精准灌溉中的标定与应用[J]. 江苏农业科学,2014,42(4):343-344.
[27] 江朝晖,檀春节,支孝勤,等. 基于频域反射法的便携式土壤水分检测仪研制[J]. 传感器与微系统,2013,32(1):79-82.
Jiang Zhaohui, Tan Chunjie, Zhi Xiaoqin, et al. Development of portable soil moisture detector based on principle of frequency domain reflectometry[J]. Transducer and Microsystem Technologies, 2013, 32(1): 79-82. (in Chinese with English abstract)
[28] 孟德伦,孟繁佳,段晓菲,等. 基于频域法的便携式无线土壤水分测量装置设计与试验[J]. 农业工程学报,2017,33(增刊1):114-119.
Meng Delun, Meng Fanjia, Duan Xiaofei, et al. Design and experiment of portable wireless soil moisture measuring device based on frequency-domain method[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(Supp.1): 114-119. (in Chinese with English abstract)
[29] 李加念,洪添胜,冯瑞珏,等. 基于真有效值检测的高频电容式土壤水分传感器[J]. 农业工程学报,2011,27(8):216-221.
Li Jianian, Hong Tiansheng, Feng Ruijue, et al. High-frequency capacitive soil water content sensor based on detecting of true root mean square[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2011, 27(8): 216-221. (in Chinese with English abstract)
[30] 姜明梁,方嫦青,马道坤. 基于TDR的土壤水分传感器设计与试验[J]. 农机化研究,2017,39(8):147-153.
Jiang Mingliang, Fang Eqing, Ma Daokun. Design and experimental research of an instrument for soil moisture sensor based on TDR[J]. Journal of Agricultural Mechanization Research, 2017, 39(8): 147-153. (in Chinese with English abstract)
[31] 员玉良,盛文溢,孙宇瑞. 三深度土壤水分传感器的研制及试验[J]. 农业工程学报,2014,30(12):64-71.
Yun Yuliang, Sheng Wenyi, Sun Yurui. Design and experiment of soil water sensor monitoring soil moisture at three depths[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2014, 30(12): 64-71. (in Chinese with English abstract)
[32] 郑茹梅,李子忠,龚元石,等. 基于相位差的时域反射仪测定土壤含水量的标定和田间验证[J]. 中国农业大学学报,2011,16(1):100-104.
Zheng Rumei, Li Zizhong, Gong Yuanshi, et al. Calibration and field verification of TDR based on phase difference for measuring soil water content[J]. Journal of China Agricultural University, 2011, 16(1): 100-104. (in Chinese with English abstract)
Portable detection device of soil moisture for precision irrigation decision system
Yang Chunxi1, Liu Hua1, Xie Kexin1, Yang Qiliang2
(1.,,650500,; 2.,,650500,)
Precision irrigation by applying state-of-the-art techniques is an unavoidable trend for modern agriculture, but the dilemma is faced for predicting the soil moisture of a given crop area: Arranging limited number of soil detection sensors may not able to capture the whole information well, but adding sensors means increased investment costs. Hence, in this paper, a new soil moisture decision system by using portable detection device was designed and put into field-testing. The detection system can be decomposed into the portable soil moisture detection device and the host computer decision software. And the portable soil moisture detection device was designed with the soil moisture sensor MS-10 which follows the FDR principle, the C8051F410 low power consumption Micro-controller, the Bluetooth wireless transmission module, the data display module and the peripheral circuit. This hardware owns several useful functions such as time recording, data storage, data transmission and real-time display by LED. All these units are well organized to reduce the volume and weight of the device, which makes it easier to operate in the field. After experimental calibration and the field tests, the maximum allowable error and the design accuracy of this portable detection device were 2.2% and 95%, respectively. Meanwhile the software in PC is composed of the data receiving module, the distributed binary consensus algorithm module and the system operation interface. These sub-modules are developed by Visual Basic, Matlab and Matlab GUI, respectively. For the data collected by the portable device, firstly, it can be transmitted from the portable device to the upper computer through the data receiving module with wireless Bluetooth transmission mode; Then, it can be normalized as two states (state “0” and “1”) by the normalization method through compared with the set irrigation low limit; The third, the distributed binary consensus algorithm module is used to compute the total and the local decision results according to these data which comes from at the same time; and finally, the decision results can be displayed on the system operation interface as pictures and symbols. In addition, this software can obtain multi-scale and adjustable decision results with higher estimation accuracy if several key parameters in the distributed binary consensus algorithm are optimized by the genetic algorithm (GA). By using the bio-inspired operators such as mutation, crossover and selection, high-quality solutions can be generated efficiently for the optimization and searching problems encountered in our application. Several field tests for the designed decision system are implemented on a 30 m×30 m lawn, the results showed that the system had several advantages, such as high accurate predication (the average accuracy rate of simulation test is about 98% when data is more than 63 and the average accuracy rate of experiment tests is above 90%), lower power cost and strong extendibility. In addition, this system not only can be used independently, but also can be used as an effective complement for the classical fixed detection method. Consequently, this system improves the utilization rate of water resources effectively by means of measuring the soil moisture content accurately, reliable data wireless transmission and fast parallel computation.
irrigation; soil moisture; temperature; precision irrigation; portable; detection device; decision system
杨春曦,刘 华,谢可心,杨启良. 便携式土壤湿度检测装置用于精准灌溉决策系统[J]. 农业工程学报,2018,34(22):84-91. doi:10.11975/j.issn.1002-6819.2018.22.011 http://www.tcsae.org
Yang Chunxi, Liu Hua, Xie Kexin, Yang Qiliang. Portable detection device of soil moisture for precision irrigation decision system[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(22): 84-91. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2018.22.011 http://www.tcsae.org
2018-04-03
2018-09-24
国家自然科学基金项目(61364002,51779113);昆明理工大学实验室建设与管理研究项目资助(SYYJ35)
杨春曦,博士,教授,主要从事网络控制系统,无线传感器网络和分布式数据融合研究。Email:ycx@kmust.edu.cn.
10.11975/j.issn.1002-6819.2018.22.011
TP13
A
1002-6819(2018)-22-0084-08