实时动态多功能双目立体摄影测树仪设计
2018-11-23刘金成冯仲科杨立岩AbdulMannan
刘金成,冯仲科,杨立岩,Abdul Mannan
实时动态多功能双目立体摄影测树仪设计
刘金成1,2,冯仲科1,2※,杨立岩3,Abdul Mannan1
(1. 北京林业大学精准林业北京市重点实验室,北京 100083; 2. 北京林业大学测绘与3S技术中心,北京 100083;3. 河北地质大学土地资源与城乡规划学院,石家庄 050031)
为了实现林木精准实时定位,满足森林资源调查中多因子精准计测的需求,研发了一种集单木像对解算和林分点云测量于一体的多功能、高精度、实时定位的实时动态(real - time kinematic, RTK)双目立体摄影测树仪。该仪器以摄影测量和全球导航卫星系统(global navigation satellite system, GNSS)空间定位技术为基础,利用三角函数原理、双目摄影测量解算原理和基于运动结构(structure from motion, SfM)视觉算法,通过内嵌操作软件,实现了林木位置实时定位及林分样木还原、胸径测量、树高测量、株树密度测量、林分空间结构参数测量等功能。通过试验验证,在单木测量模式下,能快速实现林木定位,其胸径测量精度为97.11%,树高测量精度为94.72%;在林分测量模式下,依“仿航线法”观测,能快速建立林分点云模型,并实现了林分调查因子和林分空间结构参数的高效提取,其中林分胸径提取精度达到97.18%。该仪器测量精度符合林业调查的精度要求,可在森林资源调查及精准林业工作中推广使用。
林业;测量;设计;RTK测树仪;立体摄影测量;点云;森林计测;空间定位
0 引 言
陆表生态系统是人类赖以生存和发展的基础,而作为陆表生态系统主体的森林生态系统又是整个生态系统最为稳定和最为丰富的资源库、碳汇库、基因库、蓄水库、营养库等,对维持全球生态系统尤其是陆表生态系统的平衡起着不可替代的重要支撑作用[1-2],因此,如何正确认识和经营管理好森林生态系统一直是科学界研究的重点。森林资源调查作为森林经营管理获取理论数据的支撑和保障,如何高效、高质量、低成本获取多元森林调查因子,对能否及时掌握森林生态系统现状及其变化规律起着关键性作用[3-4]。
传统的森林资源调查主要采用每木检尺的方式,无论单木测定和林分测量,都借助包括测径围尺等树干直径测量工具、布鲁莱斯测高器等树高测量仪器、TGC-300型光学测树仪等光学测树仪器在内的测树设备实现森林调查因子的测定[5-6];近年来,随着科学技术的发展和数学技术、地理信息技术、计算机技术等的多学科间交叉融合,各种新型的测树装备和林业观测技术方法不断涌现,比如地面观测技术、遥感技术、摄影测量技术、三维激光扫描仪技术等[7-13],被广泛地应用在了森林资源调查工作中,尤其是手持式电子测树枪[14]、CCD配合经纬仪林木识别系统[15]、微型超站仪[16]、CCD超站仪[17]、森林智能测绘记算器[18]、激光摄影测树仪[19]等多功能综合测树仪的相继出现,已经基本解决了林业观测的技术难题,且也形成了较为完整的森林调查技术体系[20]。但是,现有林业观测装备仍然存在很多缺陷和不足,或者集成度不高、仪器功能单一,或者成本较高、测量精度较低,目前市面上尚无能够实时动态获取林木精准地理位置的多功能高集成度林业测树仪器。
针对上述情况,为了更好地满足森林资源调查的需求,本文综合分析传统森林计测技术和现有多功能综合测树仪的基础上,利用摄影测量和全球导航卫星系统(global navigation satellite system, GNSS)定位技术,基于三角函数原理、双目摄影测量解算原理和运动恢复结构(structure from motion, SfM)视觉算法,旨在设计一种实时动态、多功能、高精度的非接触式测树仪器——RTK双目立体摄影测树仪,并提出利用该仪器实现单木和林分参数高效、精准提取的方法。
1 RTK双目立体摄影测树仪仪器构成
1.1 硬件构成
实时动态(real-time kinematic, RTK)双目立体摄影测树仪(以下简称“RTK测树仪”)是由RTK模块(GNSS接收机)、影像获取模块(双CCD镜头)、姿态模块(MEMS传感器)、主控存储模块-便携掌上电脑(personal digital assistant, PDA)等主要部件及固定云台、锂电池和可伸缩天线杆等辅助部件构成,其整体构成框架如图1所示。其中,便携PDA作为主控操作模块,通过短距离无线收发芯片nRF24L01与模块间进行通讯和传输。仪器上2个CCD镜头竖直基线固定,且基线长为25 cm,为了保证影像的高重叠度,上下2个CCD镜头保持水平向前且相互之间严格平行。根据测量需求和仪器使用习惯,将仪器各组成部件高度集成,设计便携式仪器硬件和易操作性仪器外观。仪器在工作前需要严格检校,RTK模块、摄影获取模块和姿态模块的相对空间位置关系需要固定不变,其相关位置和偏移参数需要检校和确定。

注:I为主控存储模块,II为RTK模块,III为影像获取模块,IV为姿态模块。
其中,RTK模块选用定制的支持L1、L2载波的GNSS接收机开发板(南方测绘SOUTH,中国),经过后期二次开发,集成内置测量天线、三星六频高精度定位模块、蓝牙模块及其他模块一体的高增益信号接收机,用于获取高精度WGS-84坐标系绝对点位坐标,并将坐标信息传输到主控模块,获取的真实点位坐标作为后期影像解算的外方位线量元素;影像获取模块选用2个同类型CCD镜头(SONY ILCE-QX1,日本),均为定焦光学镜头(已获取检校报告),背照式CMOS(Exmor R CMOS)传感器,6组7片(4片非球面镜片/其中含AA镜片)的镜头结构,F1.8-F4.9最大光圈,支持WiFi和NFC功能,LED补光灯,NP-BN/NP-BN1锂电池,440幅续航能力,用于获取待测样木立体像对,并将影像信息传输到主控模块,用于兴趣点解算;姿态模块选用JY901型号高集成MEMS(microelectro-mechanical systems)传感器,集成三轴加速计、三轴陀螺仪、三轴角度测量功能,用于即时获取仪器本身的姿态信息,保证摄影瞬间两CCD镜头的最佳姿态,此时的姿态信息作为后期影像解算的外方位角量元素;主控存储模块选用高通骁龙617处理器(MSM8952)、Adreno 530 GPU、双通道LPDDR4X RAM、陀螺仪、电子罗盘、数据传输模块、彩色触控显示屏以及1 200 mAh 聚合物锂电池集成,其中,CPU为1.5 GHz核心频率,八核cortex-a53,GPU为高通64位,RAM内存为2 GB,用于坐标信息/影像信息的分类存储以及单木测量模块的实时解算及存储。
1.2 软件构成
软件部分主要涉及个人掌上电脑开发设计,采用模块化结构处理,其内嵌软件基于Java语言在Android Studio2.2开发环境下编译,主要包括单木测量模块和林分测量模块。图2为程序整体控制框图,用户根据实际的测量环境和测量工作需求,选择进入不同的测量模块,通过模块间的信息传输和集成,将立体影像数据、点位数据和角度数据进行匹配和分类,为后期模块解算做好准备。针对单木测量模块,可直接在PDA主控模块上通过点选对应的特征点进行参数解算,获取样木地理位置、胸径、树高等特征参数;针对林分测量模块,首先将利用PDA主控模块将获取影像和对应的外方位元素信息进行匹配和分类存储,便于后期软件的批量处理和解算,从而实现林木测量的目的。测量结果数据均可通过SQLite数据库进行操作,存储数据最终通过USB接口与处理终端进行传输。

图2 PDA整体控制框图
1.3 功能及参数
RTK测树仪主要针对森林资源调查中单木因子提取和林分样地因子提取2种测量模式,利用立体像对解算原理、GNSS定位原理、电子电路原理以及数字图像处理技术、SfM视觉算法等,实现单木测量和林分样地测量。在此基础上,以森林计测学、测树学、森林经理学为指导,实现样木精准位置定位、胸径、树高及任意高处直径测量和林分样地三维还原、样木树心坐标位置、林分平均胸径、林分平均高等林分因子测量。
两CCD镜头有效像素为2 020万,最大分辨率为5 472 pix×3 648 pix,APS画幅为23.2 mm×15.4 mm,GNSS接收机定点增益≥5 dBi,水平面覆盖角度为360º,相位中心误差为±2 mm,天线头尺寸为150 mm×23.7 mm,PDA外观尺寸为239 mm×172 mm×8 mm,水平定位精度(root mean square, RMS)为(10+10-6) mm,垂直定位精度(RMS)为(15+10-6) mm,仪器可连续工作时间为5 h,工作环境温度为−10~55 ℃。
2 测量原理
2.1 单木测量原理
针对林业调查中的孤立木、古树名木及难以到达处单木的观测,选取RTK测树仪单木测量模式实现单木因子提取,其具体测量方法如图3所示。

注:S01、S02为2个放置仪器的站点,S1、S2分别表示2个CCD镜头的位置,B为2个CCD镜头在竖直方向固定基线长,A1、A2分别表示目标树树根地表位置点和树顶位置点,A3、A4分别表示目标树胸高(1.3 m)位置左右沿两点,d1.3表示目标树的胸径,cm。
1)选择距离目标树合适位置01、02分别放置仪器,其中,站点01、02与目标树的夹角为90°,此外,保证测站点周围较为空旷、无遮挡,且目标树均能够完整的成像在上下2个镜头内。
2)利用PDA控制采集测站点坐标,同时2个CCD镜头获取目标树的立体像对,“确认”后导入像片。
3)针对目标树位置测定,如图3所示,分别在上下2张像片上选取树干底部(即树根地表位置)同名像点1,假定上下两CCD镜头的摄影中心分别为2和1,其固定基线长为;1点在1获取像片上对应的像点1坐标为(1,1),对应的像方空间点坐标为(1,1,−1),1点在2获取像片上对应的像点2坐标为(2,2),对应的像方空间点坐标为(2,2,−2);假定空间点1的物方坐标为(X,Y,Z),按照共线条件方程原理[21-22],存在式(1)。

式中1、2为旋转矩阵,1与2为点投影系数;将基线在以1建立的辅助坐标系中分解展开,如图4所示,可得式(2)。


注:BX、BY、BZ表示摄影基线B在空间坐标系3个坐标轴上的投影。
联立式(1)和(2),由于摄影时都是保持竖直摄影,结合点投影系数特征,建立了特征点1相对于摄影中心1的物方空间坐标公式。






2.2 林分测量原理
针对林业调查中地形较为平坦的小范围林分观测,选取RTK测树仪林分测量模式,设计了一种“仿航线法”林分摄影观测方案,实现林分调查因子的提取,其具体观测方法如图5所示。

注:(1,2,…,n)为林分观测放置仪器的站点,1 m表示两站点间距为1 m。
1)选定待测区域,并根据待测区域形状设计行进路线(包括区域边界、路线转角和行进路径等),最佳测站点间距为1 m左右。
2)选定起始摄影站点,进入林分测量模式,利用PDA操控RTK模块和双CCD摄影模块进行正直摄影,并按照设计路线依次完成操作,其中,行进转角处需要按照图5所示的旋转摄影方式进行摄影路线的转换,保证后期影像间的拼接和匹配。

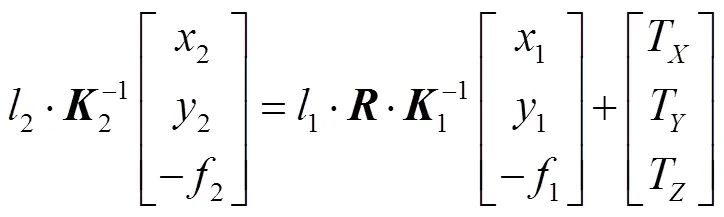
式中1、2为空间点到2个CCD镜头投影中心的垂直距离,1、2分别为两CCD镜头摄影焦距表达的内参矩阵,(T,T,T)为物方坐标三维方向的坐标偏移量。
4)在完成特征点匹配之后,采用BA(bundle adjustment)模型自动解算相机位置和场景几何形态信息,这些特征从一幅图像追踪到另一幅图像,初步估计相机位置和目标物的空间坐标,借助实时采集的“类似POS”点位坐标数据,采用非线性最小二乘算法不断优化得到最值,最终得到特征点的空间坐标[26]。
5)在获得空间特征点点云模型的基础上,可直接确定林分内样木精准点位坐标;除此之外,可利用距离公式求算空间特征点之间的几何关系,进而实现林分内样木胸径、树高、平均胸径、平均树高以及角尺度、大小比、混交度等林分空间结构参数的测定[19]。
3 试验结果与分析
3.1 单木测量试验验证
为了验证RTK测树仪的单木测量功能及测量精度,在北京市海淀区展开了试验。由于单木测量功能受地形、季节及气候条件限制较小,待测树木相互不遮挡或者孤立即可,其观测条件要求相对较低。根据观测条件共选取了30棵树作为试验样本,其中包含银杏、鹅掌楸、侧柏、华山松等4个树种。其中,以胸径尺(测树钢围尺,太平洋牌,北京)测量的胸径作为胸径标准值,以MINI超站仪(微型超站仪,精准林业北京市重点实验室)测量的树高作为树高标准值[16,22,27]。按照2.1小节的单木测量方法,利用RTK测树仪分别对试验样本进行观测,获取样木精准点位坐标和对应的胸径、树高值,并将试验观测值与对应的标准值进行比较,结果见表1。经计算分析,RTK测树仪实现了基于WGS-84坐标系下的样木点位精准快速测定,其胸径测量精度为97.11%,树高测量精度为94.72%。
3.2 林分测量试验验证
林分测量受地形地势条件影响较大,而对观测季节和气候条件要求不高,只要保证林分环境林冠下灌木及草本不存在遮挡情况即可。为了验证RTK测树仪的各项林分测量功能及其可行性,试验地点选择在北京市海淀区一片地势较为平坦的人工林,试验时间为2018年1月,其地理坐标为40°00′29.620″N、116°19′52.030″E。按照3.2小节的林分测量方法,根据林分地形及林木生长状况,利用RTK测树仪参考设计的“仿航线法”观测路径对待测林分进行“多航线”摄影,并利用PDA对影像数据和点位坐标数据(“类似POS”)分别存储。利用商业软件Pix4Dmapper(Pix4D公司,瑞士)对获取的影像和点位坐标进行处理[28-29],生成在WGS-84坐标系下的可量测三维点云模型。针对点云模型,截取距地面1.25~1.35 m的点云位置,自动测算出所有样木的胸径值,林分样木位置分布以及胸径测算结果如图6所示。
从图6中可以清晰地看出样地内样木之间的相对位置分布及每棵样木对应的胸径值,每棵样木也可以提取其精确的实际地理坐标。为了检验胸径测算精度,同样以胸径尺测量的胸径作为胸径标准值,比较结果如图7所示,经计算分析,林分胸径点云测算结果与标准值基本一致,胸径测算的绝对误差最大值为0.9 cm,相对误差绝对值的平均值为2.82%,其林分胸径提取精度为97.18%。

表1 RTK双目立体摄影测树仪单木测量结果对比分析

注:每个点位表示样地内样木之间的相对位置分布及邻近关系,数字表示每个样木对应的胸径值,cm。

图7 RTK双目立体摄影测树仪胸径测量值与标准值比较
当然,在林分点云模型的基础上,除了可以实现样木胸径自动提取,还可以利用相关参数原理和计算公式[30-31]提取点云数据,计算林分平均胸径、林分平均高、株树密度以及角尺度、大小比、混交度等空间结构参数因子,计算结果见表2。

表2 RTK双目立体摄影测树仪林分因子测量结果
3.3 结果与分析
1)针对单木测量,选取包括针叶树和阔叶树在内的30个试验样本进行验证分析,RTK测树仪除了实现了样木精准点位实时测定,还实现了样木胸径和树高的快速测量,其胸径测量精度为97.11%,树高测量精度为94.72%。
2)针对林分测量,提出“仿航线法”林分观测方法,利用影像和点位坐标数据建立可量测点云模型,在此基础上,实现了多个林分因子和林分空间结构参数因子的自动提取和测算,经验证,其胸径测算精度为97.18%;这与RTK测树仪单木测量模式胸径测量精度97.11%较吻合,但是精度要优于单木测量精度,原因在于点云模型胸径提取方式与胸径围尺测量方式更为接近,都考虑了样木胸高位置的形状。
3)所提出的观测方法仍然存在一定的不足,在不考虑人为误差的情况下,仪器检校(包括CCD镜头的检校和仪器集成综合检校等)误差和树木遮挡、电磁干扰等环境因素带来的干扰都会对最终的测量精度造成影响;无论单木测量模式还是林分测量模式,为了提高仪器的测量精度,应保证仪器检校参数正确,同时规避由于人为因素造成的测量误差,除此之外,受到客观条件(比如没有网络信号或信号较差)限制的测量误差,需要后期技术上的改进和理论上的创新。
4 结 论
本文阐述了一种多功能、高精度、实时定位的综合测树仪器——实时动态多功能双目立体摄影测树仪,该仪器最大的优势在于可以实时动态获取目标点位的真实地理坐标,既可进行立体像对实时解算,也可基于影像构建3维点云。该仪器集成了摄影测量技术和GNSS定位技术,基于空间三角函数原理、双目摄影测量原理和SfM视觉算法,设计并完成了“点测量-面测量-空间测量”的技术升级。针对单木测量模式,设计并实现了单木位置实时定位、单木胸径/树高测量功能;针对林分测量模式,提出了“仿航线法”林分观测方法,设计并实现了林分样地三维还原、平均胸径/平均树高测量、株树密度测量及林分空间结构参数测量等功能。
经初步试验验证,实时动态多功能双目立体摄影测树仪在样木位置实时测定及林分三维点云还原方面有独特的优势,就单木测量而言,其胸径测量精度为97.11%,树高测量精度为94.72%;就林分测量而言,其胸径提取精度达到97.18%。仪器各项功能测量精度基本满足林业调查的精度要求,可在森林资源调查及精准林业工作中推广使用。
[1] 岳天祥,范泽孟. 典型陆地生态系统对气候变化响应的定量研究[J]. 科学通报,2014(3):217-231.
Yue Tianxiang, Fan Zemeng. A review of responses of typical terrestrial ecosystems to climate change[J]. Chinese Science Bulletin, 2014(3): 217-231. (in Chinese with English abstract)
[2] Mirtl M, Borer E T, Djukic I, et al. Genesis, goals and achievements of long-term ecological research at the global scale: A critical review of ILTER and future directions[J]. Science of the Total Environment, 2018, 626: 1439-1462.
[3] 周光辉,曾伟生,陈雪峰. 我国森林资源和生态状况监测存在的问题与对策[J]. 中南林业调查规划,2006(4):1-5.
Zhou Guanghui, Zeng Weisheng, Chen Xuefeng. Problems and countermeasures in monitoring forest resources and ecological conditions in China[J]. Central South Forest Inventory and Planning, 2006(4): 1-5. (in Chinese with English abstract)
[4] 王雪军. 基于多源数据源的森林资源年度动态监测研究[D]. 北京:北京林业大学,2013.
Wang Xuejun. Annual Forest Resources Dynamic Monitoring Research Based on Multi-data Source in the case of Anshan City[D]. Beijing: Beijing Forestry University, 2013. (in Chinese with English abstract)
[5] 孟宪宇. 测树学[M]. 北京:中国林业出版社,2006:350.
[6] 闫飞. 森林资源调查技术与方法研究[D]. 北京:北京林业大学,2014.
Yan Fei. Research on Techniques and Methods of Forest Resource Investigation[D]. Beijing: Beijing Forestry University, 2014. (in Chinese with English abstract)
[7] 高祥. 森林资源调查监测信息化技术方法研究[D]. 北京:北京林业大学,2015.
Gao Xiang. Research on Information Technology and Method of Forest Resources Investigation and Monitoring[D]. Beijing: Beijing Forestry University, 2015. (in Chinese with English abstract)
[8] White J, Wulder M, Vastaranta M, et al. The utility of image-based point clouds for forest inventory: A comparison with airborne laser scanning[J]. Forests, 2013, 4(3): 518-536.
[9] Tong X, Liu X, Chen P, et al. Integration of UAV-based photogrammetry and terrestrial laser scanning for the three-dimensional mapping and monitoring of open-pit mine areas[J]. Remote Sensing, 2015, 7(6): 6635-6662.
[10] Maas H G. Automatic forest inventory parameter determination from terrestrial laser scanner data[J]. International Journal of Remote Sensing, 2008, 5(29): 1579-1593.
[11] 史洁青,冯仲科,刘金成. 基于无人机遥感影像的高精度森林资源调查系统设计与试验[J]. 农业工程学报,2017,32(11):82-90.
Shi Jieqing, Feng Zhongke, Liu Jincheng. Design and experiment of high precision forest resources survey system based on UAV remote sensing image[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 32(11): 82-90. (in Chinese with English abstract)
[12] Bauwens S, Bartholomeus H, Calders K, et al. Forest inventory with terrestrial LiDAR: A comparison of static and hand-held mobile laser scanning[J]. Forests, 2016, 7(12): 127.
[13] Liang X, Jaakkola A, Wang Y, et al. The use of a hand-held camera for individual tree 3D mapping in forest sample plots[J]. Remote Sensing, 2014, 6(7): 6587-6603.
[14] 徐伟恒,冯仲科,苏志芳,等. 手持式数字化多功能电子测树枪的研制与试验[J]. 农业工程学报,2013,29(3):90-99.
Xu Weiheng, Feng Zhongke, Su Zhifang, et al. Development and experiment of handheld digitalized and multi-functional forest measurement gun[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013, 29(3): 90-99. (in Chinese with English abstract)
[15] 侯鑫新. 基于CCD和经纬仪的林木图像识别系统研究[D]. 北京:北京林业大学,2014.
Hou Xinxin. Study on Image Recognition System based on the Tree Images Taken by a CCD Camera Mounted on a Theodolite[D]. Beijing: Beijing Forestry University, 2014. (in chinese with English abstract)
[16] 黄晓东,冯仲科,解明星,等. 自动测量胸径和树高便携设备的研制与测量精度分析[J]. 农业工程学报,2015,31(18):92-99.
Huang Xiaodong, Feng Zhongke, Xie Mingxing, et al. Developing and accuracy analysis of portable device for automatically measuring diameter at breast height and tree height[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(18): 92-99. (in Chinese with English abstract)
[17] 刘金成,黄晓东,杨立岩,等. 基于CCD超站仪的森林样地建立与精测方法研究[J]. 农业机械学报,2016,47(11):316-321.
Liu Jincheng, Huang Xiaodong, Yang Liyan, et al. Establishment and precise measurement of forest sample plot based on CCD super station[J]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(11): 316-321. (in Chinese with English abstract)
[18] 邱梓轩,冯仲科,蒋君志伟,等. 森林智能测绘记算器设计与试验[J]. 农业机械学报,2017,48(5):179-187.
Qiu Zixuan, Feng Zhongke, Jiang Junzhiwei, et al. Design and experiment of forest intelligent surveying and mapping instrument[J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(5): 179-187. (in Chinese with English abstract)
[19] 杨立岩,冯仲科,范光鹏,等. 激光摄影测树仪设计与试验[J]. 农业机械学报,2018,49(1):211-218.
Yang Liyan, Feng Zhongke, Fan Guangpeng, et al. Design and experiment of laser photogrammetric instrument for measuring forest[J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(1): 211-218. (in Chinese with English abstract)
[20] 冯仲科,黄晓东,刘芳. 森林调查装备与信息化技术发展分析[J]. 农业机械学报,2015,46(9):257-265.
Feng Zhongke, Huang Xiaodong, Liu Fang. Analysis of the development of forest investigation equipment and information technology[J]. Transactions of the Chinese Society for Agricultural Machinery, 2015,46(9): 257-265. (in Chinese with English abstract)
[21] 冯文灏. 近景摄影测量:物体外形与运动状态的摄影法测定[M].武汉:武汉大学出版社,2002.
[22] 黄晓东. 地面摄影测量获取测树因子的研究[D]. 北京:北京林业大学,2016.
Huang Xiaodong. Study of Acquiring Tree Measurement Factors by Terrestrial Photogrammetry[D]. Beijing: Beijing Forestry University, 2016. (in Chinese with English abstract)
[23] García-Gago J, González-Aguilera D, Gómez-Lahoz J, et al. A photogrammetric and computer vision-based approach for automated 3D architectural modeling and its typological analysis[J]. Remote Sensing, 2014, 6(6): 5671-5691.
[24] Mikita T, Janata P, Surový P. Forest stand inventory based on combined aerial and terrestrial close-range photogrammetry[J]. Forests, 2016, 7(12): 165.
[25] Kukko A, Kaijaluoto R, Kaartinen H, et al. Graph SLAM correction for single scanner MLS forest data under boreal forest canopy[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2017, 132: 199-209.
[26] James M R, Robson S, D’Oleire-Oltmanns S, et al. Optimising UAV topographic surveys processed with structure-from-motion: Ground control quality, quantity and bundle adjustment[J]. Geomorphology, 2017, 280: 51-66.
[27] 陈金星. 便携式测树仪的研制及应用研究[D]. 北京:北京林业大学,2016.
Chen Jinxing. The Development and Application of Portable Dendrometer[D]. Beijing: Beijing Forestry University, 2016. (in Chinese with English abstract)
[28] Christoph Strecha R Z S R. Quality assessment of 3d reconstruction using fisheye and perspective sensors[J]. ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, 2015(3):215-222.
[29] Malambo L, Popescu S C, Murray S C, et al. Multitemporal field-based plant height estimation using 3D point clouds generated from small unmanned aerial systems high-resolution imagery[J].International Journal of Applied Earth Observation and Geoinformation, 2018, 64: 31-42.
[30] 徐伟恒. 手持式超站测树仪研制及功能测试研究[D]. 北京:北京林业大学,2014.
Xu Weiheng. Study on Handheld Tree Measurement Smart Station Manufacture and Function Test[D]. Beijing: Beijing Forestry University, 2014. (in Chinese with English abstract)
[31] 冯仲科,徐伟恒,杨立岩. 利用手持式超站测树仪测量林分空间结构参数[J]. 农业工程学报,2015,31(6):213-217.
Feng Zhongke, Xu Weiheng, Yang Liyan. Measurement of stand spatial structure parameters by hand held super station tree measuring instrument[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(6): 213-217. (in Chinese with English abstract)
Design of real - time kinematic multi-functional binocular stereo-photogrammetric dendrometer
Liu Jincheng1,2, Feng Zhongke1,2※, Yang Liyan3, Abdul Mannan1
(1.100083; 2.3100083,; 3.,050031,)
The construction of green ecological civilization is the key to ecologically sustainable development. The quick and accurate acquisition of multivariate forest resource factors is of great significance for the prompt understanding of forest ecosystem and its changing patterns. With the development of science and technology in the forestry survey, a variety of multifunctional dendrometers have been constructed, which basically solved the technical problems of forestry observation. However, there are still many deficiencies in existing forestry equipment, such as low integration degree, insufficient functions, high cost and low measurement accuracy. Currently, there is no dendrometer capable of obtaining accurate geographic location of trees. In this research, we designed a multi-function, high-precision and real-time positioning RTK (Real-Time Kinematic) binocular photogrammetric dendrometer. The main hardware components of the equipment included RTK module, CCD (Charge Coupled Device) image acquisition module, MEMS (Micro-Electro-Mechanical System) sensor position module, main control storage module-portable PDA (Personal Digital Assistant), while the auxiliary components included fixed cloud platform, lithium battery, and telescoping mast. The software was developed by a modular structure compiled in Android Studio 2.2 development environment based on the Java language. The equipment’s basic operating principle was based on multifunctional photogrammetry, GNSS (Global Navigation Satellite Systems) spatial positioning technology, trigonometric function principle, binocular photogrammetry principle and SfM (Structure from Motion) vision algorithm. The equipment had the capability to perform many functions such as the real-time position of trees, downsizing of sample trees in a forest stand, DBH (Diameter at Breast Height) measurement, tree height measurement, tree density measurement, and forest stand spatial structure parameter measurement. For the single tree measurement model, the real-time positioning of single trees, tree DBH and tree height measurement function was designed and implemented. And for forest stand measurement model, we proposed and implemented the “imitation route method”. The experiment was carried out on 30 test trees (including both coniferous and broad-leaved trees) of 4 different tree species we selected in Haidian district, Beijing, with single tree measurement mode. Our equipment measured the real-time tree position, DBH, and height of trees in the study area. This equipment had an advantage in measuring ancient trees, precious tree species, or trees that were difficult to measure manually. The results showed the accuracy of DBH measurement was 97.11%, and the accuracy of tree height measurement was 94.72%. To find the forest stand measurement, a relatively flat artificial forest in Haidian district of Beijing was selected as the experimental area, after considering the influence of topographic factors on measurement results. According to the terrain conditions, growth and distribution of trees, the scheme of “imitation route” was designed to obtain forest stand images. The pix4D commercial software was used for quick and accurate establishment of the three-dimensional point cloud model of the forest stand. Our results showed that the average DBH was 17.9 cm, while the average tree height was 18.26 m, density was 928 trees/hm2, angular scale was 0.675, size ratio was 0.625, and mingling intensity was 0.200. The accuracy in the measurement of the forest stand DBH was 97.18%, which was consistent with the measurement accuracy of 97.11% of the single tree measurement mode. The preliminary test verified that the RTK tree-meter had unique advantages in real-time measurement of the sample tree position and three-dimensional point cloud restoration of the stand. The forest stands investigation factors such as the position of trees, average DBH, average height, tree density and the spatial structure parameters of forest stand such as angle scale, size ratio and mixed degree were extracted efficiently, which had a positive effect on the research of small and medium-sized forest plots. The precision of this equipment was in the range specified in China's national forest resources continuous inventory technical regulations (2014 edition) and meets with the requirements of forest survey.
forestry; measurements; design; RTK (real-time kinematic) tree measuring instrument; stereo-photogrammetry; point cloud; forest measurement; spatial positioning
刘金成,冯仲科,杨立岩,Abdul Mannan. 实时动态多功能双目立体摄影测树仪设计[J]. 农业工程学报,2018,34(22):61-68. doi:10.11975/j.issn.1002-6819.2018.22.008 http://www.tcsae.org
Liu Jincheng, Feng Zhongke, Yang Liyan, Abdul Mannan. Design of real-time kinematic multi-functional binocular stereo-photogrammetric dendrometer[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(22): 61-68. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2018.22.008 http://www.tcsae.org
10.11975/j.issn.1002-6819.2018.22.008
S758.7
A
1002-6819(2018)-22-0061-08
2018-05-11
2018-09-20
北京林业大学青年教师科学研究中长期项目(2015ZCQ-LX-01);国家自然科学基金项目(U1710123);北京自然科学基金重点项目(6161001)
刘金成,博士生,主要从事摄影测量与地面测绘、林业装备与信息化研究。Email:jincheng9010@163.com
冯仲科,教授,博士生导师,主要从事精准林业、测绘与3S技术集成研究。Email:fengzhongke@126.com