基于HD-SHM 2005系统型线光顺的方法研究
2018-11-23王亚宁李兰兰
王亚宁,李兰兰
(1.黄海造船有限公司,山东 威海 264309;2.威海海洋职业学院, 山东 威海 264309)
0 引言
型线光顺作为生产设计的第一步,也是后续工作的基础。型线光顺的好坏,将直接影响到船体的建模、外板的展开,最终影响到船舶成型后的美观,甚至影响到船舶的航速、阻力和振动噪声等性能指标。目前,船舶企业在将设计院提供的初始型线转换到HD-SHM 2005船体型线光顺系统过程中,可通过以下两种方式来实现[1]。一是将型值表中的型值手工输入HD-SHM 2005型线光顺系统中。该方法工作量较大,且输入过程容易出错。现仅对某些特殊点才采用该方法输入,如空间线和甲板线的首尾端点。二是运用ACAD图形生成型线。选取某根ACAD曲线,将其转换成型线,即可将该型线与水线、纵剖面或站线交点输入到相应的型值表中。该方法操作简单且实用。
通常初始型线较为稀疏,运用ACAD图形生成的型线,有些部位无法与初始型线相重合,因此需要额外增加各种型线来解决。型线增加越多,转换的效果越好,但随着型线的增加,型值点也在增加,后续光顺的工作量也就越大。本文研究的主要目的是借助型线光顺系统以及数据处理机理,适当引入数学软件的辅助建模,探索通过增加最少的型线达到最好的效果。
1 建模及模型改进
型线包括横向剖面线(又称站线)、纵向剖面线(简称纵剖线)、水平剖面线(简称水线)、空间曲线。本文将通过建模分别进行分析,并得到相应的结论。
1.1 站线模型
对于无平行中体的船型,前后半船划分时需要重叠2站,即后半船从11站至船艉,前半船从9站至船艏。前后半船分别对9~11站进行光顺,光顺完后,前后半船拼接成全船,此时需保证重叠部分的各站线和肋骨线上的水线半宽和纵剖线高度型值必须一致[2]。
1.1.1建立模型
为便于结果验证,首先选取某船型线较为规则的纵剖面进行研究,得到模型结果后再通过其他型线变化复杂的剖面进行可靠性分析。某船纵剖面如图1所示。

图1 某船纵剖面
若仅将9、10、11站定位为站线,通过ACAD曲线生成[3]的型线拼接后效果如图2所示。
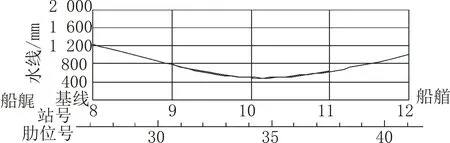
图2 前后半船型线拼接
将9~11站局部放大后如图3所示。图中,虚线为后半船型线,实线为前半船型线。
1.1.2模型改进对比
从图3可知,在9~11站间局部出现了12 mm偏差,势必影响将来前后半船拼接,因此可采取提前在9~11站间将肋位定位成站线的方法来解决。图4将31、32、33、35、36、37肋位定义成站线[4],运用ACAD图形生成的前后半船型线可完全重合。
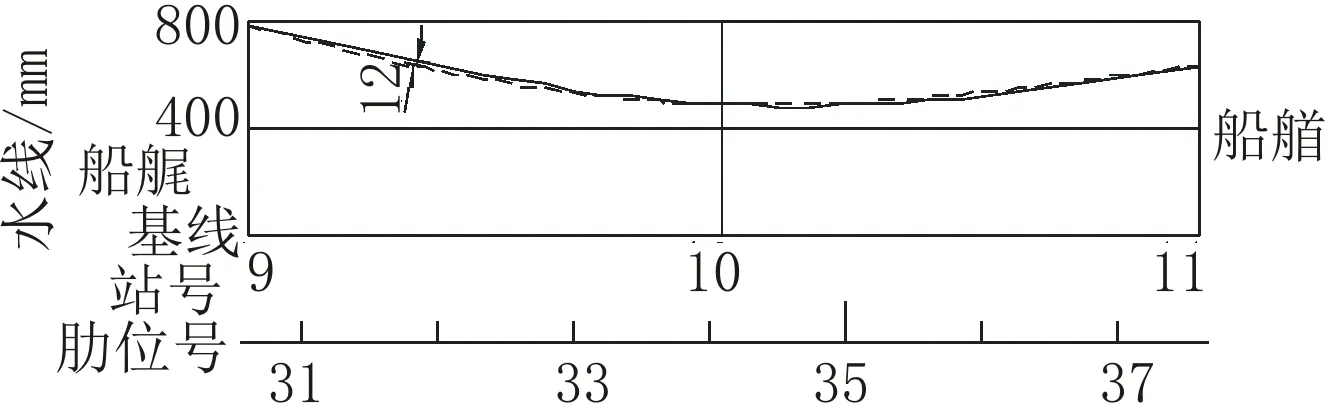
图3 局部放大

图4 插入站线后纵剖面
1.2 纵剖线模型
为了表达水线端部形状,型线图中有时会给出水线圆头R值。在操作中需将R值填入到水线控制信息表中,这个过程相当于通过增加控制点来控制水线圆头。但在进行光顺前处理时,会丢失R值范围内部分型值。考虑将来艏柱板的放样,采用加密纵剖线的方式来控制曲度较大的水线端部,效果更好。
1.2.1建立模型
图5为某小型渔船水线面。若仅按定义18、19、20站线和水线圆头R,生成的型线如图6所示,其中实线为初始型线,虚线为生成的型线。
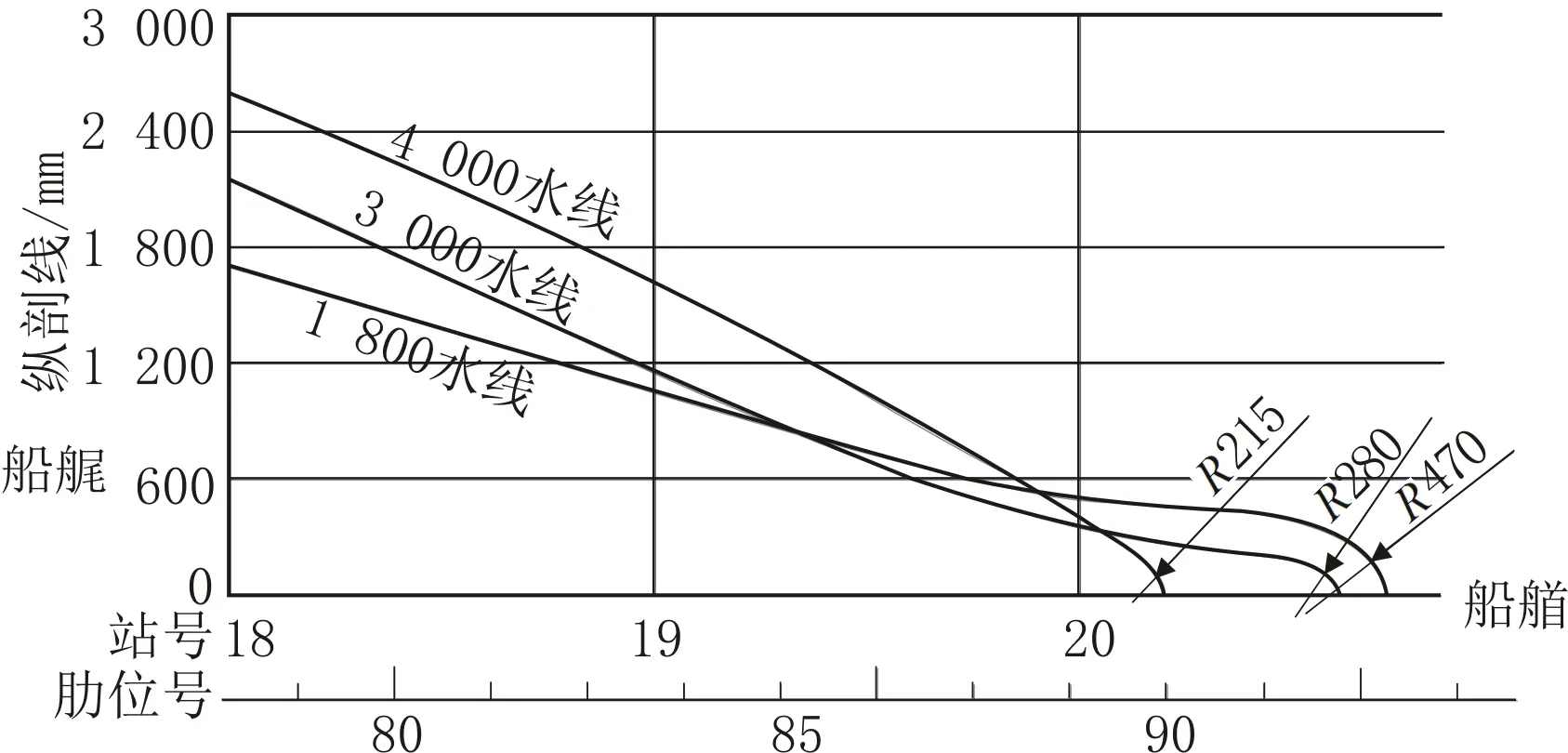
图5 为某小型渔船水线面(单位:mm)
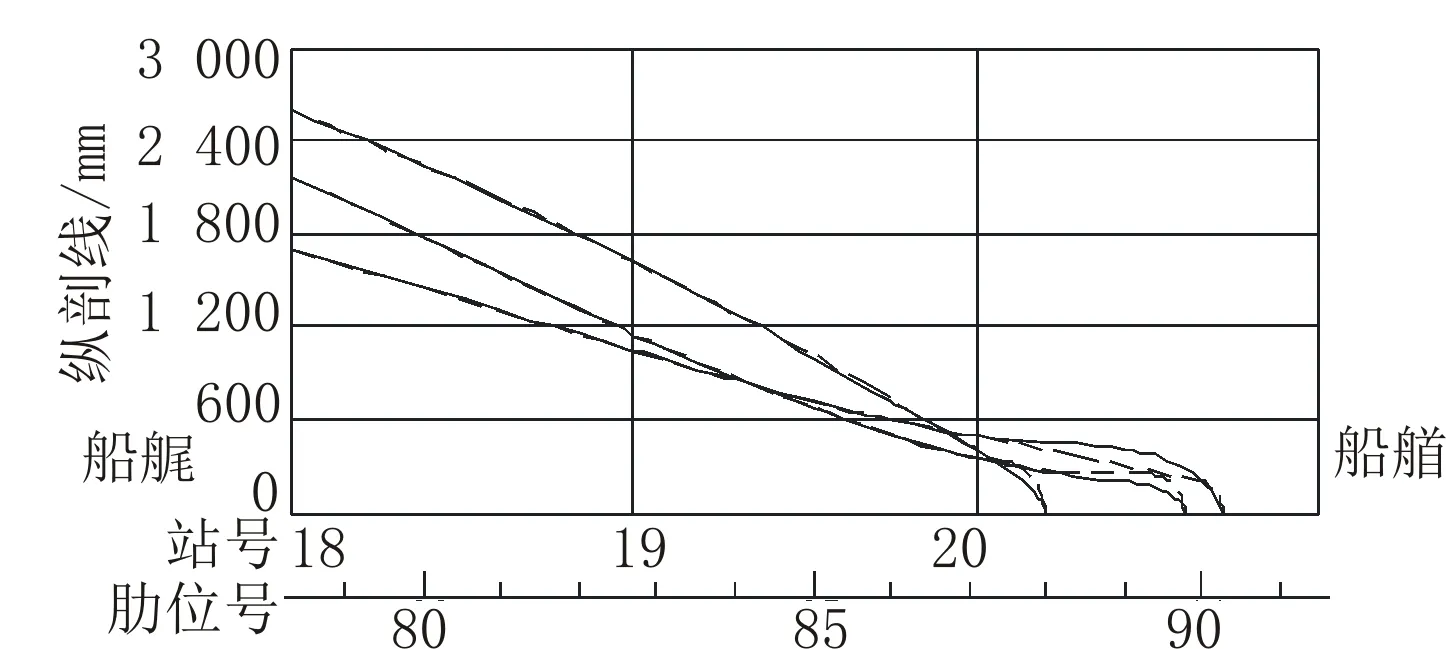
图6 生成型线与初始型线比较
1.2.2模型改进对比
依据越靠船舯越密的原则,为更好地控制水线,增加纵剖线50、100、200、300、450 mm,生成的型线与初始型线基本重合,而且增加纵剖线有利于艏柱外板的放样。两型线比较图如图7所示。
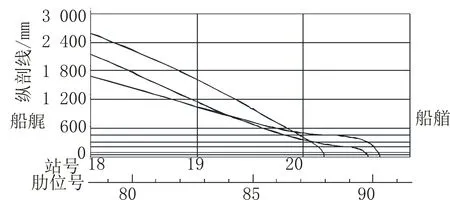
图7 生成型线与初始型线比较
1.3 水线模型
对于双艉鳍船型,初始型线在艉轴出口处水线和纵剖线相对稀疏,不足以控制站线,可适当增加水线和纵剖线。
某客货船艉部横剖面图如图8所示。在初始型线基础上增加2 500 mm水线和5 500、4 500、3 500 mm纵剖线,运用ACAD图形生成的型线将更接近初始型线。
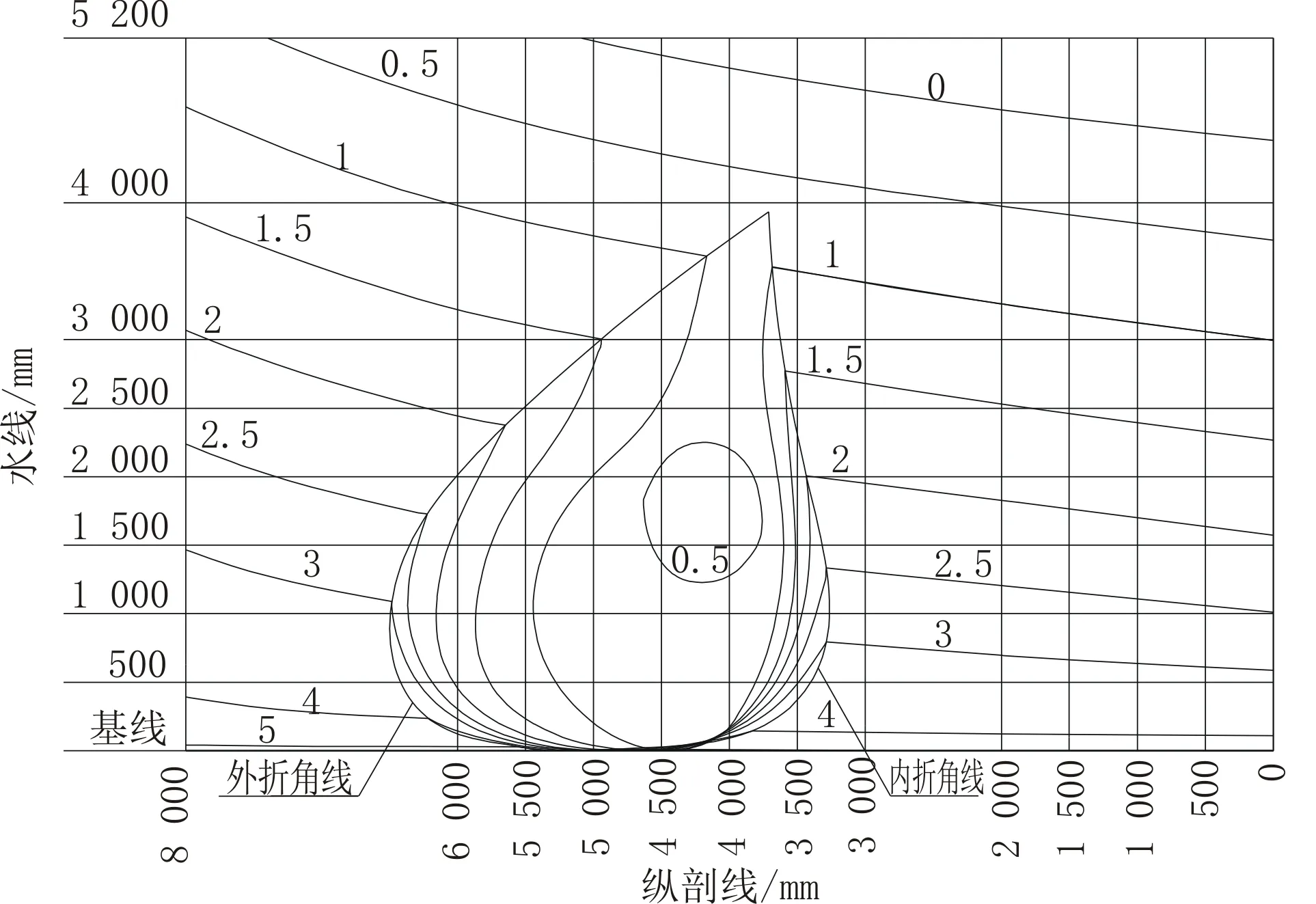
图8 某客货船艉部横剖面
1.4 空间线模型
空间线是控制船型的重要曲线,有折角线、切点线、轮廓线三种类型,而轮廓线又分为平面轮廓、侧面轮廓和横向轮廓。所有的空间线作为三向光顺时的控制曲线,因此空间线的准确性和光顺程度对船舶至关重要。
在有折角的位置均增加折角型空间线。艉鳍部位的站线最低点可视情况增加轮廓线。另外,将底平线和边平线定义成切点线。
1.4.1建立模型
对于无设计纵倾的船舶,型线中基线作为全船最低点,但在光顺过程中,经常会出现部分型线低于基线的情况,如图9所示。虽然通常仅超出几毫米,但在实际建造中,超出部分将影响外板的安装,导致外板与肋板存在间隙,或者需要将超出部分剔除并打磨光滑,增加大量工作量。同样,舷侧也会出现型线超出半宽的情况。

图9 某横剖面线低于基线
1.4.2模型改进对比
经过实践操作,在底平线(即基线)和平边线(即半宽纵剖线)粗光顺后,将其重复定义成切点型空间线即可解决。解决后效果如图10所示。

图10 解决后效果
1.5 控制点模型
由于HD-SHM 2005系统采用自动排序型值点生成型线,因此其排序效果取决于型值点的分布情况。在一般情况下,自动排序都能圆满地得出正确的型线,但是对于一些弯度特别大的型线(如双艉鳍船),则会出现不正确的排序,导致型线图形出现错误,这时可以加入控制点来控制型线的排序,以得出正确的型线。
1.5.1建立模型
图11为通过ACAD曲线转换后的站线,其走向错误。

图11 某根走向错误的站线
1.5.2模型改进对比
从图11中可以发现有好多出处走向错误,比如首尾端点错误、折角点走向错误。
(1)首尾端点的定位。要想整条型线走向正确,首尾端点首先要定位好。为了方便调整型线,综合对比影响型线端点的因素[5]后发现,两个主要因素对控制型线端点的定位有较好的结果:一是控制点,二是型值表。
可以在艉鳍左侧增加个控制点,并将控制点类型修改为X方向一般、Y方向走向C,并不断修改该控制点的位置,直至站线与0纵交点成为端点为止。修改后型线如图12所示。
这种增加控制点的方法可以较好地定位端点,且有效地减少走向错误的折角点。虽然改善了原始走向错乱的型线,但是端点定位的精确度不够高。
通过研究文献[1]和文献[4]发现,可以通过直接设置型值点的位置来控制端点。多次实验对比发现,将型线的预设端点坐标设置在型值表的E7H/E7B位置,可精确定位型线的端点。不管是增加控制点还是定位型值表,结果都是可以较好地定位型线的端点,后者实际运行的效率更高,效果如图12所示。

图12 增加控制点后的站线
(2)端点定向后型线在2 500 mm和3 500 mm水线之间还可能存在局部交叉的情况,如图13局部放大。
在2 500 mm和3 000 mm水线间利用数学技术MATLAB拟合计算出增加控制点的数值,类型仍为X方向一般、Y方向一般。修改该控制点位置,直至该区域走向正确位置,然后修改控制点类型,将Y方向改成走向C,如图14所示。
2 稳定性分析
调用不同船型和不同位置上的型线可考察型线图像的走势,分析系统误差,从而验证上述结论的稳定性。经验证,本文总结的光顺规律不管外界条件如何变化,针对不同种错乱的型线,在HD-SHM 2005光顺系统中具有广泛的适用性,且经过严格的误差分析表明,光顺后型线与原始型线的误差在可控范围之内。

图13 局部放大

图14 走向正确的站线
3 常用型线光顺方法归纳
通过对各种船型进行对比光顺仿真模拟,本文所得到结论归结为:型线光顺应从不同的方向分别讨论参数的设置。
(1)纵剖线方向光顺,可将肋位定位成站线来解决。
(2)水线方向光顺,通过增加纵剖线能更好地控制水线。
(3)为了表达水线端部形状,采用加密纵剖线的方式来控制曲度较大的水线端部,效果更好。
(4)站线方向光顺,对于双艉艉鳍船型,初始型线在艉轴出口处水线和纵剖线相对稀疏,不足以控制站线,可适当增加水线和纵剖线。
(5)空间线模型,在有折角的位置均增加折角型空间线。艉鳍部位的站线最低点可视情况增加轮廓线。另外,可将底平线和边平线定义成切点线。
(6)控制点模型,改变首尾端点错误的问题。一是可以在型线主部负方向增加控制点,并将控制点类型修改为X方向一般、Y方向走向C;二是将型线端点的预设坐标直接设置在型值表中的E7H/E7B位置上。两种方法效果相似,后者的实际操作更高效。局部型线发生错乱,借助MATLAB拟合曲线,找出合适的控制点控制局部型线的走势。
4 结语
型线光顺是船舶企业生产设计的关键环节。本文研究的生产设计是基于HD-SHM 2005型线光顺系统,设计院提供的原始型线不能直接用于生产,必须要转换到HD-SHM 2005系统中,才能进行后续的建模、放样、下料、控制等流程。型线在转换的过程中,经常会发生错乱。本文分别从站线、水线、纵剖线三个方向多种因素展开仿真建模,通过计算研究表明,不同类型的型线光顺要点不尽相同。
