具有通信时延和拓扑时变的多无人机姿态同步控制
2018-11-22余亮,林达,任斌,唐余
余 亮, 林 达 , 任 斌, 唐 余
(四川理工学院a.自动化与信息工程学院;b.物理与电子信息工程学院, 四川 自贡 643000)
引 言
近年来,多智能体一致性理论成为控制理论界十分活跃的一个研究方向,多智能体相比于单个智能体行动而言有着更好的灵活性、适应性、执行能力等优点。同时,对多智能体一致性协议与协同控制的研究也直接为多飞行器群体、航空母舰编队、卫星协同控制等问题提供了指导思想[1]。
同时,多智体系统一致性理论作为智能体之间协同控制的基础,得到了快速发展。所谓一致性是指多智能体在网络环境下通过感知测量周围成员的信息并彼此交换,在各个智能体上分布式的产生某种算法或协议,使得这些智能体在相互协同的问题上达成一致,从而协同地完成共同的任务[2]。针对一致性问题,有两个问题是不可避免的:一是在多智能体系统中,任意两个智能体之间存在通信时延是肯定存在的,文献[3-5]中介绍了解决通信时延的一致性算法,并将其应用于多无人机协同控制系统中,但在实际应用中这些假定均不能得到有效的满足,如通信的延时并不能被限定为连续的;另一问题是在协同控制过程中通信拓扑结构发生改变后如何确保相互之间的信息能够得到及时的交换而不受影响[6]。因此,研究在拓扑结构发生改变和存在通信时延的情况下处理好相互之间的信息交流就显得很有现实意义[7]。
无人机协同编队离不开相互间的信息沟通,而在编队中的通信常会受到恶劣的天气、电磁干扰、通信设备故障等因素的干扰而造成通信延时[8],甚至造成通信链路中断。文献[9]分析了通信距离限制、通信角度限制、通信时间延迟等对编队的影响,利用状态估计的无人机状态信息补偿方法来消除通信延时的影响。文献[10]针对固定通信拓扑下具有时变时延的多无人机系统同步的问题,利用Lyapunov-Krasovskii函数分析了时延多无人机系统的稳定性,提出了一种基于一致性协议的分布式编队控制算法。文献[11]选取包含位置跟踪误差和速度跟踪误差的辅助变量,提出了一种适用于时变通信延迟的鲁棒自适应编队控制策略。
在无人机编队执行任务的过程中,可能会因地理位置或敌人攻击等因素而改变编队形式。文献[12]针对具有切换互联拓扑的无人机群的时变编队控制问题,提出了具有双环结构的控制方案,即内环控制器控制姿态,外环控制器驱使无人机飞向期望的位置。文献[13]中针对在不确定的通信时延和随机切换通信拓扑结构情况下,通过引入状态向量和状态空间转化将多无人机群系统转化为两个解耦子系统,基于解耦的子系统,得到了收敛的充分条件。
本文在已有的基础上,研究了多无人机系统在时变通信时延和随机切换通信拓扑的情况下姿态同步的问题,并在一致性理论的基础上构造了类Lyapunov-Krasovskii泛函方程,推导出了系统达到稳定时的充分条件,设计了控制扭矩。最后通过仿真验证了该控制算法的有效性和鲁棒性。
1 预备知识
1.1 无人机姿态动力学模型
参考文献[14],本文采用四元数表示无人机的动力学模型。定义单位四元数Q=(qη)T∈R4,|Q|=1;且单位四元组满足约束条件QQT=1。


图1给出了四旋翼飞行器模型的架构,其中θ、φ、ψ分别表示俯仰、滚转、偏航角。这种常见的四旋翼无人机通过增加或降低四个发动机的旋转速度来实现沿z轴的推力,实现无人机的爬升或降低。滚转运动通过增加旋翼2的推力,减小旋翼4的推力来控制,以此来得到一个向右的滚转;俯仰运动则是通过旋翼1和旋翼3之间不同的速度来实现的;偏航运动则通过调整顺时针和逆时针旋转旋翼的平均推力来实现。比如:差动地改变旋翼1、3和旋翼2、4的推力,由于旋翼空气阻力和反扭力,将产生围绕机体Z轴的力矩,引起偏航运动。
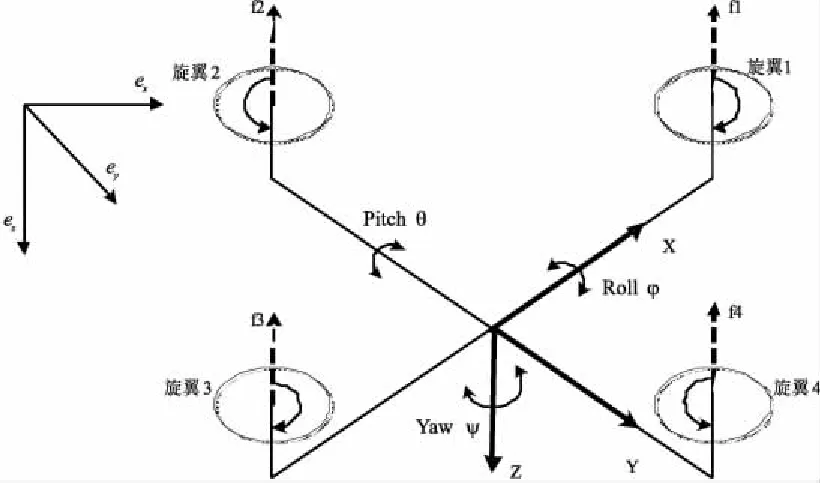
图1 四旋翼飞行器模型的架构示意图
在本文中,多无人机系统中第i架无人机的动力学模型如下:
(1)
式中:Qi为第i个刚体方向的单位四元素;Qj(t-τij)为第j个刚体接收到的绝对姿态;τij为时变通信时延。
1.2 通信拓扑
为实现无人机群的编队或姿态同步,就必须根据各无人机之间相互交换信息来设计控制方案,因此,无人机群之间的通信对控制器的设计至关重要。一般来说,多无人机系统中信息交互可用无向图和有向图两种方法来描述。在本文中,采用无向加权图G来表示无人机之间的通信结构。G由三元组(N,F,K)构成,其中:N={1,…,n}表示节点,用于描述群中飞行器集合;F是成对节点的集合,也称为边,边(i,j)∈F表示第i个系统接收来自第j个系统的信息,且两者相邻;K=[kij]∈Rm×n是加权邻接矩阵,其定义为:当且仅当(i,j)∈F时,kij>0;当(i,j)∉F时,kij=0;同时,kii=0。用Gn={G1,G2,…,Gp},p≥1来表示无人机通信系统间可能存在的通信拓扑图合集。

引理1[15]考虑由n架无人机组成的群,群中各无人机之间的通信根据无向加权图G互连,若满足下列方程:
那么,qij=0是上式的唯一解。
1.3 评价指标
为清晰地阐释该姿态协同算法在实现姿态同步受通信时延影响的同时能继续保持,可引入如下的姿态保持性能指标:

在暂态过程中,σ1的数值越小,表示该算法的性能越好。同样地,再引入姿态一致性性能指标:
同样,在暂态过程中,σ2的数值越小,表明多无人机之间相对姿态保持即姿态一致性性能好。
2 姿态同步控制器设计
考虑由n架无人机组成的编队,多无人机之间的通信用无向加权图G表示。针对式(1)表示的无人机的动力学模型,本文主要研究存在通信时变时延并切换通信拓扑的情况下,多无人机系统姿态同步的问题。参考文献[2]设计第i架无人机控制输入为:
(2)

其中:τij为时变时延。

定理1考虑无人机模型(1)和控制输入(2),在假设通信时延τij有界的情况下,即对于所有(i,j)∈F有τij≥τ,其中τ是一正常数,若ε>0,令控制器增益满足:
证明利用式(1)和式(2),闭环动力学方程可以写为:
(3)
考虑下面的Lyapunov-Krasovskii泛函:
(4)
式中:ε>0,τij<τ,τ为正常数,ηij为Qij中的标量部分。



同理,可以证明得到:
且
利用无向通信图的对称性,可得:

3 仿真及分析

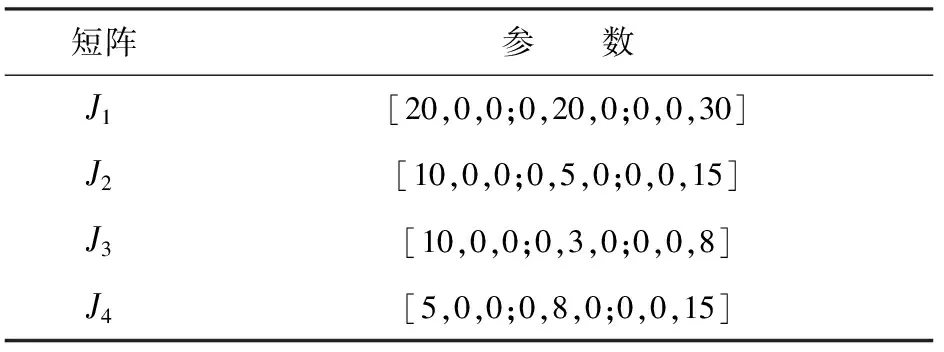
表1 无人机惯性矩阵参数(单位:kg·m2)
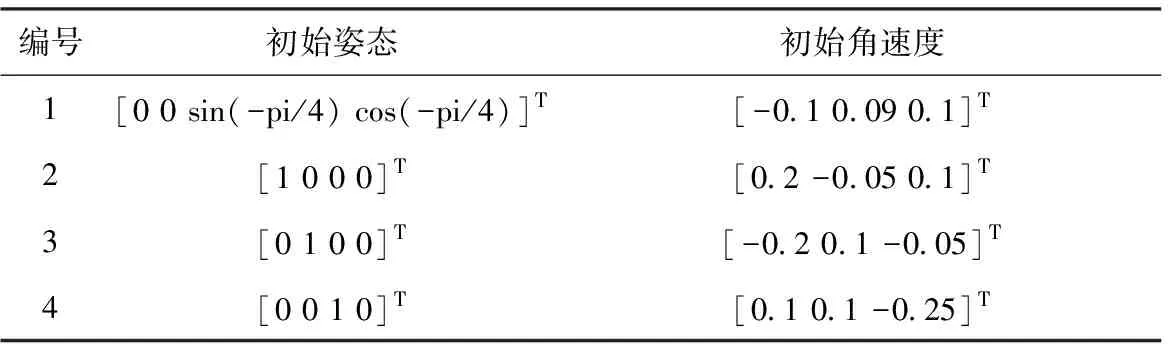
表2 无人机初始化状态
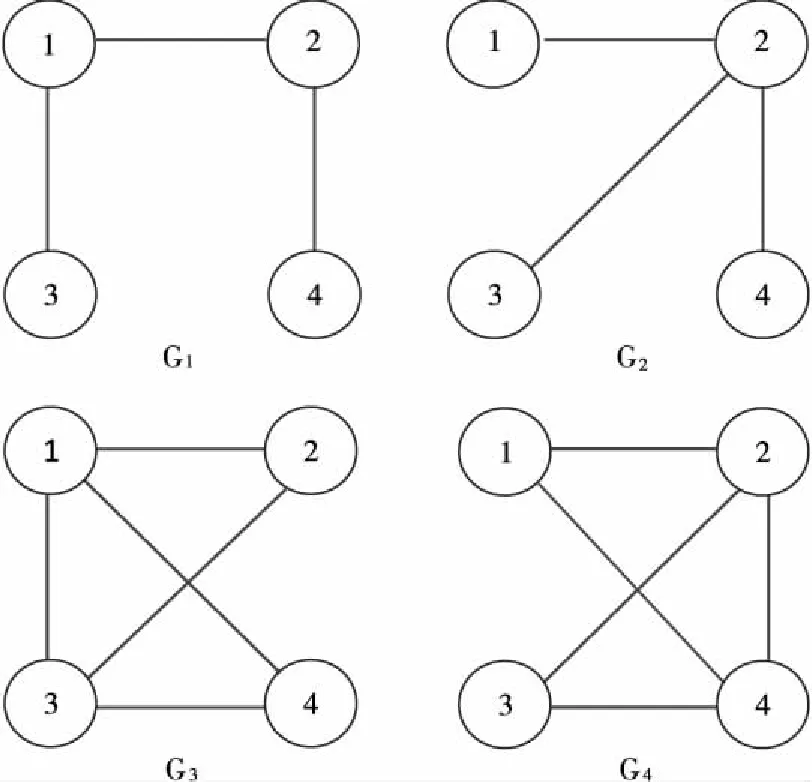
图2 多无人机通信拓扑随机切换图
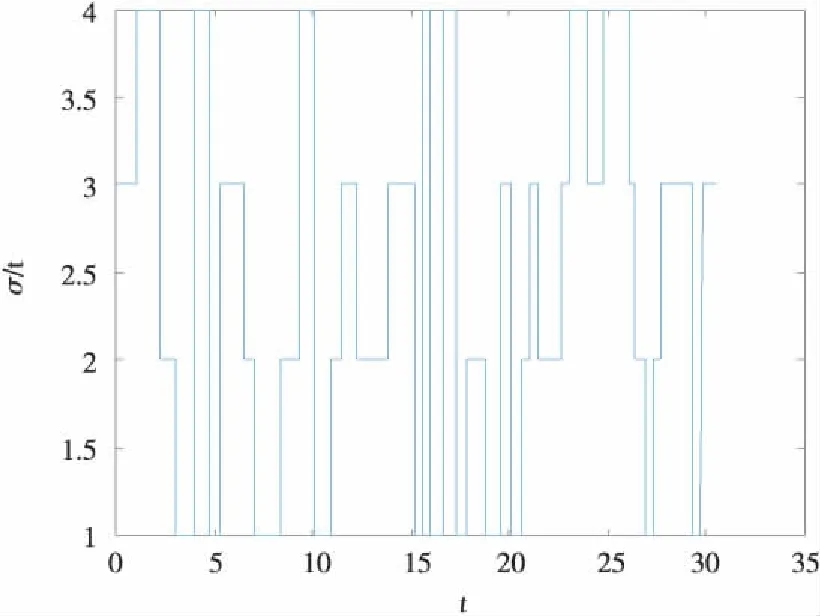
图3 t时刻多无人机的通信拓扑结构类型σ(t)
图4~图6分别绘出了4架无人机在控制扭矩(2)下的姿态、角速度和输入力矩情况。通过仿真图可以看出,在通信时延和切换通信拓扑结构情况下,系统不仅能达到稳态,而且能稳定保持。
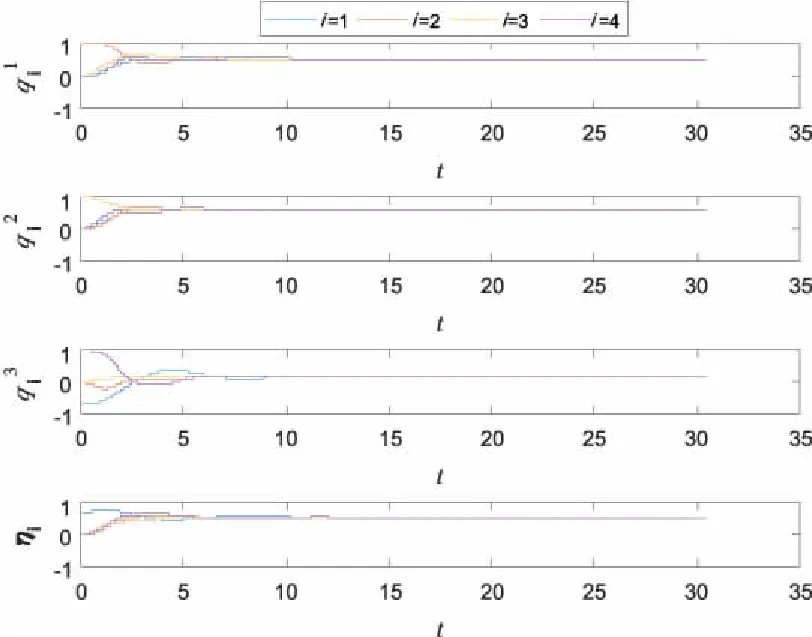
图4 基于控制器(2)的多无人机姿态
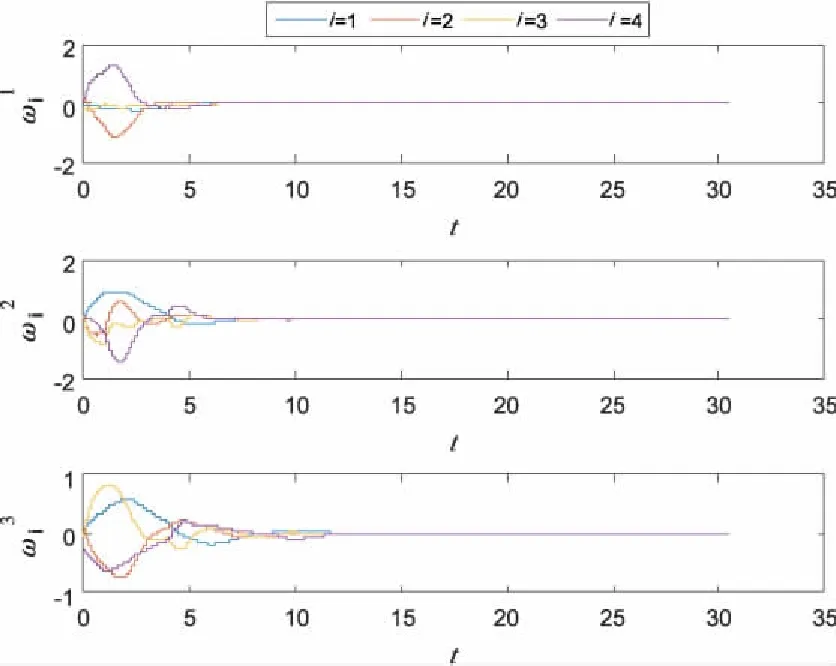
图5 基于控制器(2)的多无人机角速度
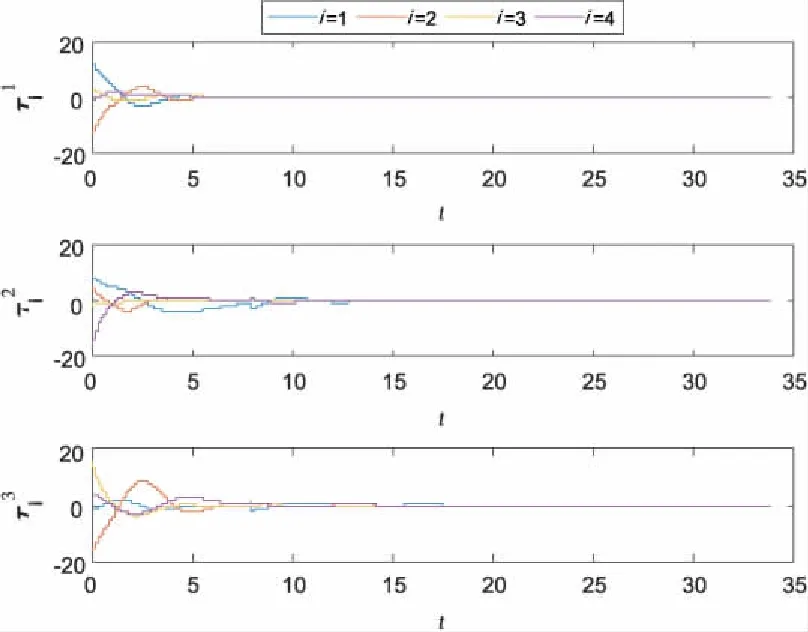
图6 基于控制器(2)的多无人机控制扭矩
另外,由图4可以看出,四架无人机的姿态误差四元数分量都收敛到了零附近,且在动态响应过程中姿态一致性得到了一定程度上的保持。同样,图5显示的角速度误差四元数分量也全部达到了同步。
通过仿真图可以看出多无人机的姿态误差和角速度误差均在5 s左右收敛于零,达到稳态以后在切换通信拓扑结构和存在通信时延的情况下,其姿态和角速度的误差仍能保持较小的值。表明了该算法有一定的鲁棒性。
图7和图8分别描述了姿态保持性能和相对姿态保持性能。在15 s后σ1收敛到了零附近,说明在动态响应过程中姿态的一致性在一定的程度上得到了保持。同样,图7中的相对姿态保持性能在各无人机姿态同步后,σ2的值也收敛在零附近,说明相对姿态保持性能较好。σ1和σ2在前15 s内值较大,是由于在此段时间内切换通信拓扑和通信时延造成的。
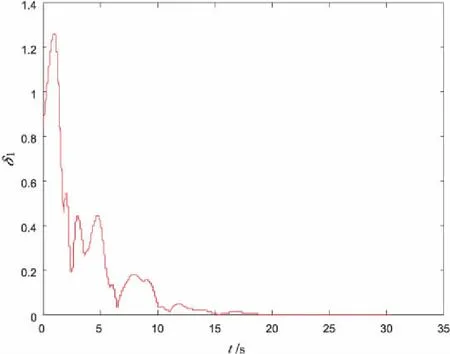
图7 姿态保持性能曲线
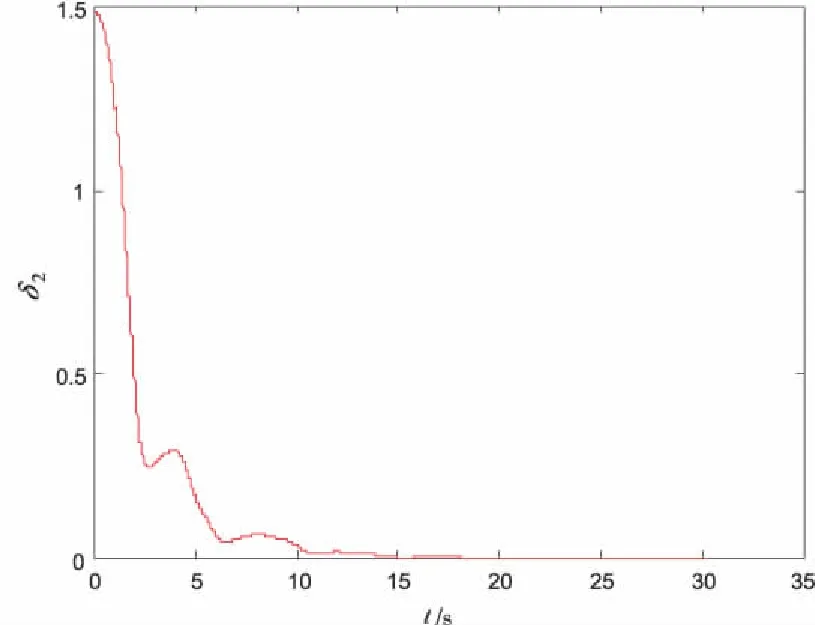
图8 相对姿态保持性能曲线
4 结束语
本文在基于一致性理论和代数图论的基础上研究了在存在通信时延和通信拓扑时变情况下多无人机姿态同步的问题,设计了相应的控制器,并在理论上证明了控制器在该情况下的有效性。相较于其他算法,本文所给出的控制算法在通信时延下随机切换通信拓扑时仍可达到姿态同步,仿真结果也表明该算法在这种情况下有较好的鲁棒性。
