俯视邻近行人风险量化分析方法
2018-11-21黄俊达杨大伟
黄俊达,杨大伟,毛 琳
(大连民族大学 机电工程学院,辽宁 大连 116605)
在人-车混行道路,分析街道中的风险行人对智能车载自主巡航系统尤为重要。本文提出一种行人风险量化分析方法,旨在为规避危险行人提供更充分的风险分析判决数据。
行人风险分析方法由多种算法模块组成,具体包括目标检测[1-2]、图像分割[3-4]、目标跟踪[5-6]和路径检测[7-8]等算法模块。目前,单目视觉行人风险方法直接从单目平视视角进行风险判别,判定左右运动朝向与车行区域存在交集的行人为危险行人。此类算法具有实时性,但受到单目平视视角透视扭曲限制,难以预测行人运动轨迹,判据有失客观性。Keller和Gavrila提出一种单目图像行人姿态识别方法[9],以高斯动态模型和稀疏光流处理为核心,能够有效识别行人运动朝向;文献[10]为单目视觉行人运动姿态识别方法研究,作者对图像进行稀疏光流分析获取行人轮廓,通过计算行人运动姿态比获得行人姿态和左右运动朝向判别结果。文献[9-10]均未考虑人-车相对运动轨迹预测情况,存在判决方式简易且缺乏客观性问题。为使行人风险判据更加充分,针对单目图像透视扭曲效应限制问题,Joko Hariyono等[11]在行人风险分析方法中引入了图像逆透视映射。通过将图像中行人坐标映射到世界坐标系,在世界坐标系中结合人-车距离、运动朝向和行人速度,分析行人预测轨迹并以此识别危险目标行人。但该方法仅实现对行人危险与否的二分类判决,没有对不同行人的风险程度进行准确量化,判决数据不足以支撑自主巡航系统实现对行人的精确规避。王建强等[12]基于人工势能场概念,提出了一种行人风险量化方法[13],该方法结合人-车-路三要素,在风险势能场中使用斥力模型,获得目标风险程度量化结果,该方法的缺陷在于风险程度量化因素主要为车辆与目标之间的相对距离,没有考虑车辆与目标之间的预测运动情况。
为实现单目视觉人-车碰撞风险量化分析,本文提出俯视邻近行人风险量化分析方法(Top view Risk Quantification analysis method for approach pedestrian,TRQ)。该方法引入图像逆透视映射,将行人坐标从图像坐标系映射至俯视二维世界坐标系,实现从图像视角到车辆前方路面俯视视角的转变。通过在俯视二维世界坐标系中构建车行风险场,计算行人预测轨迹坐标风险权重,量化获得行人风险系数,并根据系数大小将行人目标判定为安全、警告和危险三种等级。该方法经实测视频仿真验证,能够准确量化行人碰撞风险程度,并且行人目标风险等级的判定有助于改善无人车自主巡航能力,提高先进辅助驾驶系统危险预警性能。
1 TRQ方法
TRQ方法逻辑图如图1。

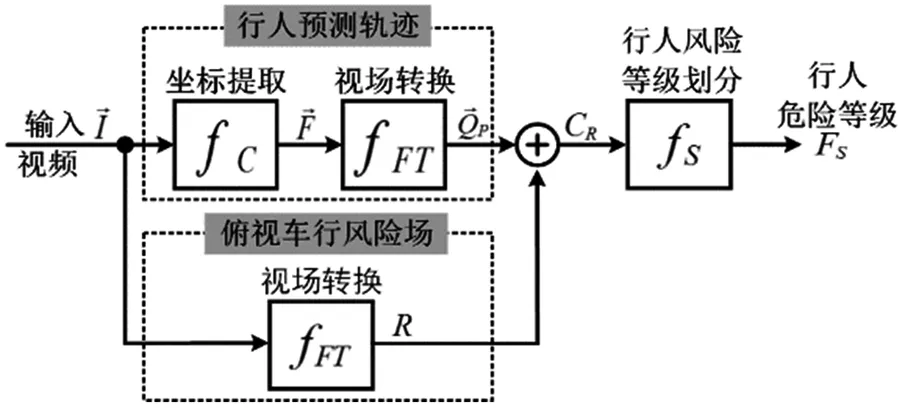
图1 TRQ方法逻辑图
1.1 行人预测轨迹
将车载摄像机固定装配在汽车挡风玻璃处,镜头朝向与车行方向平行。平视行人轨迹如图2(a)。OI为图像坐标系原点,位于图像左上角顶点;U代表图像坐标系水平坐标轴,其正方向为水平向右;V是图像坐标系竖直坐标轴,其正方向竖直向下。俯视二维世界坐标系即忽略高度轴的世界坐标系如图2(b)。OW为世界坐标系原点,位于车载摄像机对地质心投影点处;YW为竖直方向坐标轴,其正方向为车行方向;XW为水平方向坐标轴,它与YW相互垂直以描述道路表面,其正方向为水平向右;四边形ABCD包围区域为图像可视范围。


图2 行人轨迹映射示意图
(1)逻辑函数fC先后使用目标检测算法[14]和目标分割算法[15],提取目标行人脚底坐标,得到平视行人轨迹坐标向量
(1)
式中,pF,i(ui,vi)为输入视频第i帧图像中行人轨迹坐标;t表示输入视频实时帧且满足t∈Ν+,即t可为输入视频中任意一帧图像;k1为设定常数表示为预测行人轨迹所需历史行人运动信息帧数。

(2)
式中:fFT为一种图像逆透视映射方法[16];pT,i(xi,yi)为视频第i帧在俯视二维世界坐标系中行人轨迹映射坐标点,i取值范围与(1)中相同。
(3)使用最小二乘拟合方法计算俯视二维世界坐标系的线性回归拟合直线,求取行人合速度v,并据此利用卡尔曼预报器递推行人预测轨迹,计算俯视行人预测轨迹坐标为
(3)
式中,pP,c(xc,yc)为输入视频第c帧俯视行人预测轨迹坐标;k2为设定常数表示行人运动轨迹的预测帧数。
1.2 车行风险场
以俯视二维世界坐标系为参照坐标系,假定车辆相对静止,车辆运动状态将转移给行人,则行人在原有速度基础上叠加反向车速,产生对于XW轴反方向快速运动趋势。当行人合速度方向趋近车辆防撞钢梁位置时,人-车碰撞风险将快速上升。据此,将车行风险场R定义为车辆行驶在俯视二维世界坐标系中产生的碰撞风险影响,描述了俯视二维世界坐标系中行人相对车辆坐标位置的风险权重。车行风险场中风险权重关于YW轴对称且沿YW轴正方向递减,且当XW轴趋向±∞时,风险权重呈现递减趋势。


图3 车行风险场示意图
本文使用二阶拟合函数描述俯视场中风险权重,等势线分布如图3(a)。四边形ABCD所成区域为图像可视范围;线段EF为车头位置。
俯视场风险权重等势线表达式为
y=α1x2+α2x+α3。
(4)
式中:(x,y)为俯视二维世界坐标系中坐标;α1、α2和α3为拟合系数向量。在式(4)基础上,以正态分布累积分布函数描述随车前竖直方向距离相关的风险权重分布情况,得到YW-wr曲线如图3(b),其式为
(5)
式中:wr为坐标对应风险权重;期望值μ和标准差σ受车速和车辆制动能力影响;C1和C2为风险权重归一化系数。结合式(4)和式(5),计算俯视场中各坐标风险权重,以此构成风险俯视场R。
1.3 行人风险量化分析方法
(n,m)=fWM(x,y)
(6)
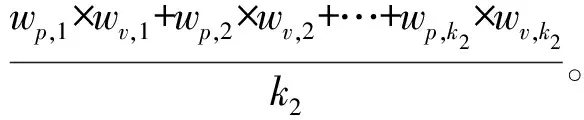
生成车行风险矩阵MV和行人轨迹矩阵MP,计算行人位置坐标对应风险权重,获取归一化行人风险系数CR。

矩阵MP可稀疏化表示为行人轨迹系数向量
(7)
式中,wp,i代表行人预测轨迹系数,且随预测时序增加而逐渐递减。利用矩阵内积筛选出MV矩阵中的计算向量
(8)

(9)
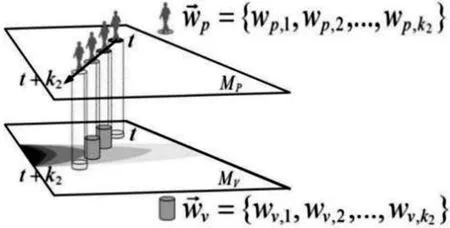
图4 行人风险系数计算示意图

(10)
行人风险系数实际上是风险系数向量累加的均值,且满足CR∈[0,1]。
对归一化行人风险系数进一步阈值划分,实现行人目标危险等级判定。行人风险状态阈值表达式为
{Cth,1,Cth,2|Cth,1≤Cth,2,Cth,1∈[0,1],
Cth,2∈[0,1]}。
(11)
式中,Cth,1和Cth,2代表“警告”阈值和“危险”阈值。使用式(12)可将行人目标判定为安全、警告或危险行人,并在图像中给予相应S、W和D符号标识。
(12)
2 仿真分析
本文所提出TRQ方法在Windows 7操作系统下经Matlab R2014a软件仿真验证。车载单目相机装配于距地面高度1.5 m;相机帧率设定为30帧·s-1;行车速度保持为15 km·h-1;参考历史行人轨迹帧数k1为15帧,行人运动轨迹预测帧数k2为120帧;行人风险系数阈值参数设定Cth,1=0.20,Cth,2=0.55。
实验数据包括3组实例场景行车视频图像数据组图和行人运动状态表。场景1行人风险量化分析结果如图5,其中:图(a)为视频平视图像的第54帧,包括行人1和行人2,二者初始位置相近,行人2速度快于行人1,忽略初始位置差距,看作两人从相同位置出发,以不同速度横穿马路;图(b)为行人运动状态俯视示意图,四边形ABCD区域内为图像成像区域,线段EF为车辆车头部分,行人以空心点表示,箭头方向即行人预测轨迹方向;图(c)为行人风险系数预测曲线,其中横坐标表示预测帧数,纵坐标则为量化风险系数。可以看出,行人2初始风险系数和整体风险曲线比行人1低。行人1风险系数持续上升至峰值为1,预测判定结果多为“危险”行人;行人2在上升至风险峰值0.40后下降为0,预测判定结果多为“警告”行人。曲线结果表明,行人1和行人2早期存在碰撞规避可能性;行人2后期成功规避行车可能性很高,行人1规避行车难度越来越高,直至无法规避行车。显然,速度较慢而无法规避行车的行人1应该列为驾驶员或自主巡航系统的首要避碰对象。

图5 仿真场景1行人风险量化分析结果
场景2行人风险量化分析结果如图6,其中:图(a)为视频第61帧图像,包括行人3和4,二者以相同速度横穿马路;图(b)预测结果显示,两人均成功规避车辆;图(c)显示行人3和4两者风险系数变化趋势相同,行人3整体风险系数高于行人4。行人3风险峰值为0.69,预测判定结果多为“危险”或“警告”行人;行人4风险峰值为0.33,预测判定结果多为“警告”行人。曲线结果表明,行人3和4能够在很大程度上规避行车危险。可见,距离车辆较近的行人3比行人4更值得驾驶员或自主巡航系统警惕。

图6 仿真场景2行人风险量化分析结果
场景3行人风险量化分析结果如图7,其中:图(a)为视频第37帧图像,行人5和6初始位置相近,视为初始位置相同行人;行人5早期速度与行人6相同,后期行人5开始加速;图(b)显示行人5加速后成功规避行车,而行人6则与车辆发生碰撞;由图(c)中曲线可知,行人5风险峰值在早期与行人6相同为1,皆判定为“危险”行人;行人5加速后,其风险峰值变为0.63并下降至0,判定结果由“危险”行人转为“安全”行人。曲线结果表明,在行人5改变运动状态前,两者因为无法规避行车而同样值得关注;在行人5加速且能规避行车后,行人6变为行车首要避障目标。

图7 仿真场景3行人风险量化分析结果
三组实例场景中行人目标运动初始位置、速度、碰撞预测结果、风险系数峰值见表1。

表1 行人风险系数变化表
以上三组对照仿真实验表明,对于速度、距离和运动状态所产生不同预测轨迹的行人目标,TRQ方法所得实时行人风险系数、预测风险系数和行人预测风险系数曲线均符合实际情况,以此验证TRQ方法的有效性。
3 结 语
针对车载单目视觉人-车碰撞风险量化问题,提出俯视邻近行人风险量化分析方法。该方法利用图像逆透视映射,将人-车相对运动分析平台转移至俯视二维世界坐标系,以此预测行人轨迹并构建车行风险场。通过进一步计算行人预测轨迹,量化行人风险系数并根据系数大小判定行人危险等级。经仿真验证,TRQ方法针对任意运动状态行人,能够输出合理行人风险系数,准确判定危险行人目标,且系数变化趋势符合人-车相对运动情况。TRQ方法具有良好的工程价值,能够为驾驶员以及自主汽车行车控制模块提供数据基础和决策,以此改善先进辅助驾驶系统数据可视化辅助性能,提高智能车载自主巡航能力。