无线水质参数检测系统的开发
2018-11-21张秀峰吴锦润
张秀峰,吴锦润
(大连民族大学 机电工程学院,辽宁 大连 116605)
水质检测是水资源环境管理与保护的重要基础,是保护水环境的重要手段[1]。近年来,随着水产养殖规模化、集约化程度的不断提高,养殖种类的增多和养殖密度的增加,养殖水域水质环境日趋恶化,病害发生率越来越高,由此引发的水产品质量安全问题也日益突出[2]。传统的水质检测采用仪表结合人工经验操作的方法,存在耗时费力、检测范围小、检测周期长、不能实时反映水环境的动态变化等弊端,采用串行总线、现场总线的水质自动检测系统需要铺设大量的电缆线,布线困难、施工难度大,且线路易受破坏和腐蚀,维护成本高,检测范围有限[3]。无线传感器网络具有智能化程度高、信息时效强、覆盖区域广、支持多路传感器数据同步采集、可扩展性好等特点[4],将其应用于水质环境监测领域有着广阔的前景。
当前无线水质检测系统多数使用自动检测仪,利用通信模块构建无线检测网络,从而实现网络化水质检测系统。在无线网络构建中,位置信息至关重要,没有准确的位置信息,检测的参数信息将毫无意义。无线传感器网络定位方法主要分为基于测距和非测距两大类,在各种定位方法中群体智能算法被普遍采用。本文以养殖水的溶氧量、pH值、电导率和温度为检测参数,设计了水质检测模块,构建了无线水质检测系统,实现了整套检测装置的无线通信。系统方便灵活,能在大范围水域实现监测,具有水质环境参数的实时采集、无线传输和远程监测等功能。
1 系统原理与结构设计
从环境监测角度,水质检测主要包括水温、pH值、浊度、溶氧量和电导率五个参数。利用水质检测传感器实时检测水质参数,对数据进行处理、分析并存储,通过本地串口总线传输给无线通信模块,并启动数据发送。监控中心的无线通信模块接收到数据后,通过串口传输给上位机,上位机对水质检测模块的位置和参数进行存储和分析,得到相关的位置和水质参数,通过监测界面进行显示并录入水质参数数据库。监控中心通过以太网将数据传送至网络服务器,进行大数据处理。
无线水质检测系统由水质检测模块、无线通信模块和监控中心组成,水质检测模块和监控中心通过无线通信模块进行数据传输,检测系统总体结构如图1。水质检测模块有传感器组、微处理器、接口单元、无线通信模块和电源模块组成;监控中心由无线通信模块和上位机组成,监控中心通过以太网与网络服务器连接。
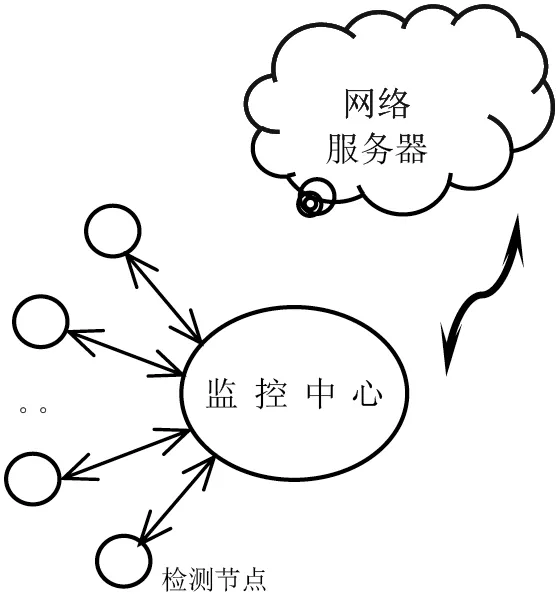
图1 水质检测系统结构图
2 水质检测模块设计
水质检测模块需要在水面甚至水下工作,对所在位置的水质参数进行实时检测。传统的水质检测装置通常利用水上架构,检测模块固定在水面以上的支撑结构上,只有传感器探头与被测水面接触,并通过总线与检测模块相连接,这样大大降低了检测装置的灵活性,使其应用受到极大的限制,支撑结构的架设也非常困难。
本文设计的检测模块采用密封盒结构,利用双侧浮力瓶使密封盒漂浮在水面,并能够在一定的范围内移动,省去了支撑架构的设计和安装,密封盒结构如图2。

图2 密封盒结构图
检测模块由传感器组、信号采集及处理单元、无线通信模块、接口单元、控制单元和电源模块组成,传感器探头伸出密封盒,与被测水面接触,其余部分被封装在密封盒内,水质检测模块结构如图3。

图3 水质检测模块结构图
CPU是水质检测模块的指挥中心,通过控制逻辑电路协调其他单元按统一的步调工作。信号采集单元包括温度、pH值、电导率和溶氧量参数检测传感器,控制逻辑电路通过启动与停止操作分时采集各水质参数;信号由CPU处理后经接口总线传送至无线通信模块;控制器按设定的逻辑关系启动无线模块发送数据,在无线网络系统中,经过一系列中间节点,将数据传送至监控中心。监控中心对数据检测点位置及水质参数进行分析和处理,在上位机中进行存储和显示;通过本地网关将水质参数数据上传至以太网,组成水质参数大数据,为水质总体评估提供可靠的依据。
为了提高系统使用的灵活性,水质检测模块采用蓄电池供电,蓄电池可以选择电网充电和太阳能电池充电。太阳能电池板安装在密封盒的上表面,可以根据太阳光照方向实时调整太阳能电池板的采光角度,使太阳能电池板保持与太阳光垂直方向,最大限度吸收太阳能。根据各用电单元的要求,调节电源输出信号,为各用电单元供电。
3 无线检测网络的设计与构建
3.1 算法原理
在无线网络系统中,传感器节点定位方法是系统设计的关键技术之一,是节点间路由算法设计、拓扑管理、覆盖控制等环节的重要基础,其热点研究问题是无线传感器节点定位精度的提高[5]。典型的定位算法有距离无关算法和基于距离的定位算法,距离无关算法无需相关的硬件配置,只根据网络连通性实现定位,具有抗干扰能力强、硬件成本低等优点而被广泛采用[6]。在众多的距离无关算法中,路径搜索算法与群体智能优化算法相结合,能加快运算速度,提高定位精度,减少成本投入。
在群体智能优化算法中,布谷鸟搜索算法(Cuckoo Search,CS)作为一种新兴的仿生群体智能算法,具有简单、参数少、易于实现等优点,而且能高效的协调算法的局部搜索和全局搜索能力[7],为无线传感器网络的定位性能改善提供了一种新的研究思路。在众多文献报道中,将节点定位转化为一个常见的数学多维约束优化问题,引入全局和局部搜索能力强的CS算法对节点位置进行估算与校正。
在传感器节点定位的过程中,未知节点(自身位置不确定的节点)通过一定的通信方式获取锚节点(已知自身位置信息的节点)的位置信息,以该信息作为参考,并根据某种算法确定自身位置信息[8]。本文通过未知节点获取三个以上的锚节点信息时,利用自身到锚节点的距离,建立距离线性方程组如式(1),根据最小二乘原理使随机误差向量达到最小值,进一步估算自身的位置[9]。
(1)
对CS算法节点定位模型进一步分析,为了减少测距误差对定位精度的影响,进一步改善系统性能,将最小二乘原理转换为数学约束优化问题。建立未知节点与各锚节点间的距离误差函数组,确定目标函数
(2)
误差方程组为求解目标函数的一个可行解空间,在求解目标函数优化的过程中,最优解包含在该空间内,只需在该空间内寻找最优解。当目标函数的值趋近于0时,函数对应解的坐标确定为该未知节点的位置。利用CS算法结合莱维飞行机制模拟布谷鸟寻巢产蛋方式,实现基于全局误差函数的节点位置最优化算法[10]。
3.2 节点定位步骤
以CS算法为依据,无线传感器节点定位方法的具体步骤如下:
(1)初始化。确定各参数的初始值,m-鸟巢的数量,Pi-产卵被发现的概率,E-搜索精度,n-循环次数;鸟巢的初始位置-无线传感器锚节点的坐标。
(2)根据初始化鸟巢的位置,采用莱维飞行方式搜索,利用更新公式进行计算,产生新一代鸟巢的位置。
(3)分别计算更新前后鸟巢的适应值,并进行比较,保留较优的适应值对应的鸟巢的位置,作为当前种群中的最优位置。
(4)若循环次数到限后,鸟巢适应值和搜索精度没有达到,则放弃本次搜索,产生新一代鸟巢位置,返回(3),继续搜索。
(5)存储最优解,满足条件,搜索结束。
4 实验与结果分析
研究开发的水质参数综合检测系统运用高精度传感器,采用模块化设计方法,完成对水温、pH值、浊度、溶氧量和电导率五个主要参数的采集、分析和处理,各模块能够实时循环显示当前位置的水质参数信息,当被测量超限时能够发出报警信号,并将超限参数与超限量和位置信息传送给监控中心。
利用MATLAB仿真软件构建仿真系统,实现无线传感器节点定位。设定200 m×200 m的二维区域,分布一定数量的锚节点和未知节点,锚节点的位置为已知,未知节点与锚节点之间的距离通过无线测距装置测定,输入到仿真系统。按照3.2节的实验步骤,计算获得未知节点的位置坐标,重复计算50次后,取平均值作为待测未知节点的位置坐标。确定各无线节点位置后,构建水质参数检测无线网络。为了验证CS算法的性能,以锚节点比例和测距误差对传感器节点定位误差的影响及定位速度作为衡量指标,与最小二乘算法(Least Squares method,LS)和人工蜂群算法(Artificial Bee Colony,ABC)进行对比,各项性能指标均优于以上两种算法。传感器节点定位误差对比如图4。

图4 传感器节点定位误差对比
图4(a)为节点中锚节点所占比例对定位误差影响的对比;图4(b)为测距误差对定位误差影响的对比。节点定位速度对比如图5。

图5 节点定位速度对比
采用Zigbee无线通信协议,利用F8913模块构建水质参数检测网络,并对节点位置进行优化,改善网络系统性能,可以进一步开发水质参数监测站。
5 结 语
通过详细分析水质检测的实际需求,运用新型检测技术,开发了水质参数检测模块,构建了无线水质参数检测系统,通过CPU实现水质参数数据的集中分析和管理。利用传感器技术、微处理器控制技术和无线通信技术开发水质检测模块,模块具有多路信号采集、数据实时处理及显示功能,可以通过通信单元实现无线通信,模块具有精度高、实时处理、重量轻、操作简单、防水等优点。设计并构建无线传感器节点,组建无线监测通信网络系统,采用智能群体算法实现传感器节点定位的优化,提高了系统性能。该系统改善了目前水质参数检测设备体积较大、防水性能差、数据精度低及分析处理能力差等缺点,通过实验测试表明,该系统具有检测精度高、数据处理及分析能力强和性能可靠等特点,具有极强的实际运用价值。
