船舶自动操舵仪故障及排除方案
2018-11-21何滨
何滨
(启东中远海运海洋工程有限公司,江苏 南通 226004)
1 引言
对于船舶而言,要使其能在航线上稳定而安全的运行,那么则需要保证自动操舵仪能够正常工作。实际上,其中舵机震荡带来的问题的发生频次最高。在我国,船舵制造行业在近几十年来已经发展得较为成熟,特别是小型船舶,年制造数量非常惊人,并且性能相当可靠。因此,我国自主制造的船舶自动操舵仪完全符合国际主流水平。笔者将对自动操舵仪这一部件进行一些简单介绍,继而重点针对船舶自动操舵仪的常见故障提出故障诊断与检测方案,旨在通过有益的探讨不断丰富船舶控制技术经验,为提高船舶的自动控制水平建言献策。
2 船舶自动操舵仪工作原理
常规自动操舵通常是指用电罗经或磁罗经检测航向偏差,在通过航向控制器进行舵角操纵,达到航向纠偏。罗经对船舶实际的航行方向进行实时把控,我们由此可以了解船舶的航行是否存在方向误差以及多大的误差,得到信号数据之后,自动操舵仪可以直接对转动舵进行控制,以此来调整航行方向。对于自动操舵仪而言,目前一般存在两种主要的操作方式,它们分别是手动与自动。当船只是在大海中运行时,一般自动操舵的工作方案比较完善,这种能够大大提高航行方向不出现错误,由此可以减轻工作人员的工作强度并且避免不必要的资源浪费。而如果船只需要在港湾转向时,这种情况下人工操舵更加灵活,另外当海面上能见度较低之时也不宜采用自动操舵方案。
笔者绘制了图一以表示自动操舵仪的工作方案。首先,操舵仪可以接受指令,对舵机实施控制以达到让其一直保持在正确航线上。当前,一些性能较强的操舵仪的精度控制范围相比于人工控制显得更具优势,几乎不会发生偏航的问题,这对于航程的行进与资源的合理调配都是非常友好的。用于海洋船舶的操舵仪操舵范围应为±35°,用于内河船舶的操舵范围应为±40°。
自动操舵有两种工况:一种是自动稳定航向;另一种是改变航向。对于平常的自动舵而言,它只能做到保持不变的方向行进的功能,而如果是航迹舵,则能够根据实际情况对航行方向进行调整。搭配着ECDIS,自动操舵仪对于航迹的控制非常严格。
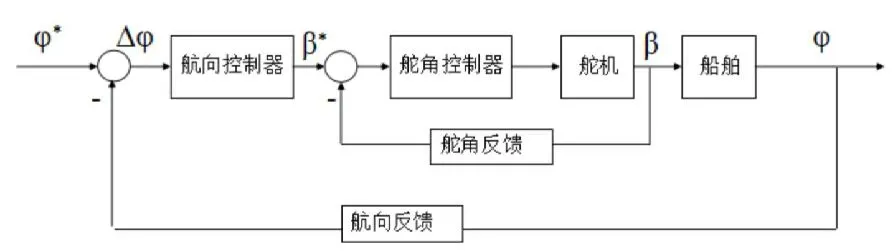
图1 自动舵工作原理
3 船舶自动操舵仪故障检查与故障维修方案
3.1 自动舵不工作
①检查液压舵机的电源、机械传动、电动机电磁阀是否出现异常。于检查舵机和操舵系统的电源。对于操舵系统,重点检查其电源、变压器是否能正常通电,确认其无故障后用手柄操舵,看与舵机连接的电源是否已接入,配套的电路是不是能正常通电,等等。③检查自动舵指令发讯部分。自动舵指令发讯常用电位器或自整角机。自整角机舵令发讯包括:舵令发送机、接收机和相敏整流。如果我们调整航向整定旋钮的话,那么整角发送机与相敏整流则会对外进行输出,一般来说,会有1V交流电压输入至自整角机。相敏整流应有0.8V的直流电压输出。另外我们是通过旋转的方向来控制电压的极性。通过上述的工作,我们可以分别对指令法迅各个零部件做出故障排查。④检查机械传动部分,观察齿轮的啮合状态。⑤放大电路和开关电路作如下检查:检查信号比较单元、运算放大器电路、脉冲形成与开关电路以及继电开关或可控硅电路的工作状态。
3.2 自动舵不准确修理
3.2.1 零部件的检查与诊断
检查舵叶机械零位、分罗经跟随主罗经是否准确,接收机机械传动,其阻力矩是不是超过了规定值0.01N·m;检查舵讯的发送、接受时,以自整角机作为例子,则需要分别对以下几个方面检验:①自整角机的校零,其方法为:找到零位,取下机器外壳的固件,利用万用表对其输出电压进行监测,需要调整时,可以直接用手转动外壳,但是不能去调整转子。这时接线间的电压会慢慢降低,待到变成0.1V时停止操作。如果仍然为零点,便可以将取下的固件安装回原位。于当以上操作无误时,如果没有办法找到零点,可以初步判断激磁绕组是否存在故障,比如当其发生断路时,便可能产生上述情况,当然,另外如果整步绕组是处于短路的状态,也会造成此类现象。这个时候先修好它们再进行零点的校正即可。
3.2.2 相敏整流电路的检查与诊断
查看输出功率是否存在异常,正常情况下,如果整流电路没有输入时,其输出的电压会在0.02V以下。除此之外,还需要对付边电压的对称性进行检查。另外,当桥臂电阻不符合二极管特性时也是不行的。只要这些部件都不存在问题,我们则可以直接对其进行相应调整,直至平衡为止。
3.2.3 放大电路的检查与诊断
对于放大电路而言,检查结点的电压工作是非常重要的,只有所有电压都符合要求之时,才能保证放大器的灵敏度。另外,还应当注意各个电路开关与阀门的状态,以及最终的电机是否正常工作。
3.2.4 自动舵机的检查与诊断
一般来说,自动舵在长期的工作当中,各个小部件是很容易被磨损的,由此我们需要对它们的状态有一个清晰的了解。比如传动部件的摩擦是否过大,各类电器元件是否正常。
3.3 自动舵不稳定修理
①查看放大器的状态,如若增益太大,整个系统便会发生不正常震动的问题。另外,对于开关放大器电路而言,由于其具备明显的继电器特征,一定得保证灵敏度大于宽度的两倍方可,否则系统容易崩溃。另外,不稳定检修还包括各个指令的发送与接收以及反馈的监测。于监测指令输入输出是否正常,舵机的旋转速度存不存在过大的现象,另外,液压系统如果发生漏油的问题,也会造成系统崩溃的问题。③在完成所有的检测与维护工作之后,是有一些仪器设备再次对维护成果进行二次检查,并且恢复施工现场的整洁。
4 自动操舵仪的检测和调试
4.1 测量系统的冷态绝缘电阻
选择500V的兆欧表,查看操纵台是否存在漏电的问题。注意在进行这项工作之前需要取下放大板。当系统在接通时不会传电即可,一般来说,绝缘电阻应当不小于0.5mΩ。
4.2 检查自动舵发讯机所发讯号的极性
关闭罗经接收器,再旋转旋钮。当输出往右行驶的命令,如果指示器显示左舵,则证明零点是准确的,否则就不对。而在这种其情况下,我们旋转发讯机,直至旋转180°,使发讯机极性达到要求。
4.3 检查自动舵仪的灵敏度
用随动舵手轮或自动舵旋钮进行操舵,观察舵叶动作是否达到要求的灵敏度,一般转动1°~2°指令舵角时,舵叶就开始动作,若达不到,可调节灵敏度旋钮。
4.3.1 舵回零与对称性检查
把舵轮由零位向左或向右转动某一舵角,然后回零位,检查随动舵回零与对称性,观察舵叶是否转动相应舵角和回到首尾线,其误差小舵角(0~5°)时不超过±0.5°,大舵角(5°~35°)时不得超过±1°。
4.3.2 自动舵回零与对称性检查
左右转动舵向匹配旋钮,给出某一指令舵角,然后回零位,观察舵叶是否转动相应舵角和回到首尾线,误差不得超过±l°。
4.3.3 测定舵角指示误差
在任意一个操舵部位,进行简单操舵,在30°操舵范围内,每隔5°测记各操舵部位上舵角复示器与实际舵角的读数,其误差值应不大于±l°。
4.4 检查自动舵仪的警报系统以及比例环节、微分环节的状态
在自动舵偏航时,应能发出偏航声光报警信号,并检查消音按钮是否工作正常;在自动操舵状态,给定5°偏航角,将比例分别置1、2、3、4、5档,转舵角应相应增大;在自动操舵状态,将比例舵调到零或最小档,突加模拟偏航角,应立刻有转舵角输出,转舵角大小应随着微分调节的不同档次而变化。
