双啮合升降装置的运动及动力学分析
2018-11-19苑思敏马剑军刘国军
苑思敏,马剑军,刘国军
(1.上海振华重工(集团)股份有限公司,上海 200125;
2.中交公路长大桥建设国家工程研究中心有限公司,北京 100088)
齿轮齿条式升降装置是自升式海洋平台、自升式风电安装平台等的关键设备之一。目前国内外大多采用一个电机驱动一个爬升齿轮的单啮合升降装置,少数平台采用双啮合升降装置(如图1所示)。

图1 双啮合升降减速箱
所谓双啮合是利用行星差动原理,用一台电动机驱动两个爬升齿轮同时与齿条啮合,并使它们均匀受载。该种升降装置最大优点是可更好的适应火焰割制的齿条周节误差较大产生的影响,避免因爬升齿轮重合度偏小而发生冲击振动,同时减少整个平台的升降装置数量。如图2所示,圆柱形桩腿外焊接4条呈十字布置的齿条,每根齿条上有4个爬升齿轮与之啮合。如果采用单啮合的形式,一个桩腿共需16套升降装置;而采用双啮合形式,则升降装置数量可减少一半,相应的电机、制动器数量均减半。
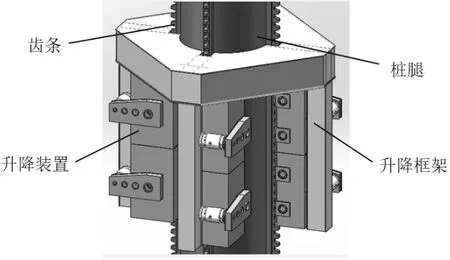
图2 双啮合升降装置布置图
1 双啮合升降装置的基本组成
双啮合升降装置的关键技术即利用行星差动原理,实现功率分流和两爬升齿轮的受力均衡。行星差动机构在船舶、海工、起重运输等设备上应用广泛,具有结构紧凑、体积小、重量轻、传动比范围大、传动效率高、输入输出轴同心、可实现动力分流和变速等特点。用于图1中双啮合升降装置的行星差动机构是由一个NGW型行星机构和大齿轮组成,行星机构又由太阳轮、行星轮、行星架和活动的内外齿圈组成,传动简图如图3所示。
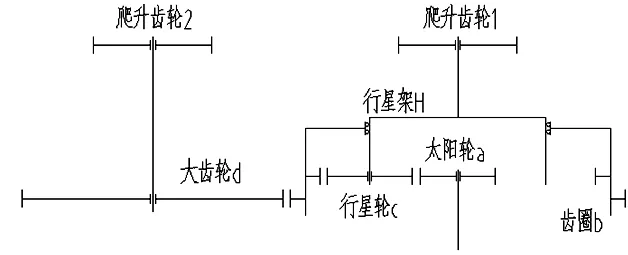
图3 行星差动机构传动简图
为方便后面计算,我们标记太阳轮为a,齿圈为b,行星轮为c,行星架为H,大向齿轮为d。其传动特点为:(1)太阳轮作为输入,行星架和齿圈作为输出,分别驱动左右两路爬升齿轮输出。(2)两个爬升齿轮构成一个“统一输出”的差动轮系,在均载的情况下,两者转速相等、转向相同,同时与桩腿上的齿条啮合。
2 行星差动机构均载原理分析
在这个差动机构中太阳轮为主动轮,若齿圈固定,则由行星架输出功率。而当行星架输出力矩时,必然会存在一个大小完全相等的反力矩作用在齿圈上。若使用一个与齿圈相啮合的大齿轮将其锁定,则大齿轮上所受的力矩与行星架输出力矩成比例。
将行星架和大齿轮分别与双啮合升降装置的两只爬升齿轮相连接,则另一个输出的爬升齿轮同样也会有一个反力矩作用在齿圈上。由于它们互相承受对方的反作用力矩,并自动调整其传动链的啮合间隙,当这两个反作用力矩完全相等时,且爬升齿轮与齿条完全紧密啮合后,差动机构停止调整,开始传递运动。两路输出互相依存,互为存在前提,由此实现了均载。
文章从力矩和传动比两个角度进行分析,研究若要最快速调整两爬升齿轮的载荷使其均载,行星差动机构应满足的特殊条件。
2.1 力矩的角度
从力矩的角度分析,即需满足两路输出作用在齿圈上的反力矩大小相等,能够互相抵消。行星架输出作用在齿圈上的反力矩如图4所示,令行星架输出到爬升齿轮1上的力矩为T0,通过受力分析可得:

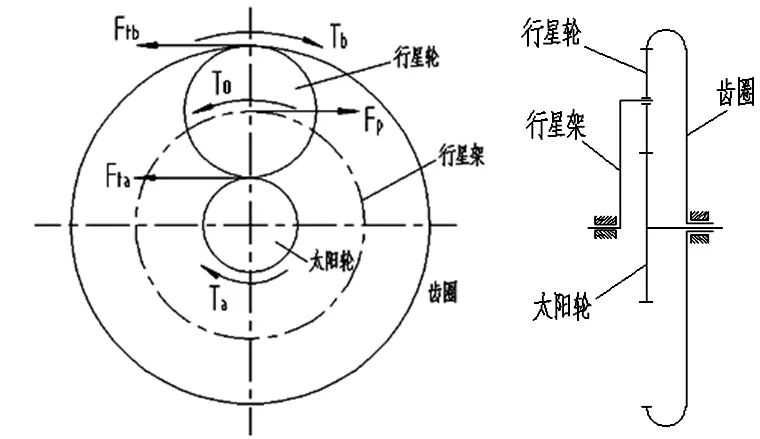
图4 行星机构传动简图及受力分析
从而计算出齿圈上的反力矩为:

式中,za为太阳轮的齿数,zb为内齿圈的齿数。
由于天然气发电成本相对较高,同时还要受天然气管网建设等因素制约,因此我国气电发展需要综合考虑多种因素,根据地区情况采取不同的发展策略。
齿圈输出作用在齿圈上的反力矩如图5所示,齿圈这一路输出到爬升齿轮2的力矩大小同样为T0,则爬升齿轮2作用在齿圈上的反力矩为,
式中,zd为左路大齿轮的齿数,zb外为外齿圈的齿数。
2.2 传动比的角度
从传动比的角度考虑,在设计计算时,应保证从太阳轮到右侧爬升齿轮1的传动比,与从太阳轮到左侧爬升齿轮2的传动比大小相等,这样在传递运动过程中,当两爬升齿轮的载荷不相等时,才能实现快速响应,重新调整为均载状态。
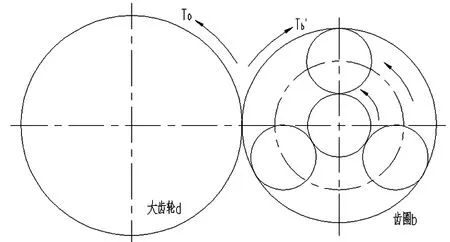
图5 行星机构传动简图及受力分析
从太阳轮到左侧爬升齿轮2输出,传动比为:

式中,zc为行星轮的齿数,z惰为惰轮的齿数。
3 行星差动机构传动比计算
前面已述,在本行星机构中有两个输出,即左右两个爬升齿轮,且二者转速相等,转向相同。其中爬升齿轮1的转速为行星架转速,用nH表示,则爬升齿轮2转速亦为nH。
传动比即为主动轮(即太阳轮)转速na与从动轮(即两爬升齿轮)转速nH之比。从运动合成的角度进行分析,单独以爬升齿轮1为研究对象,有太阳轮a和齿圈b两个输入。对于爬升齿轮1可以得出以下运动公式:

式中,nH为输出爬升齿轮1的转速(即行星架转速);为太阳轮的转速;为齿圈转速;为当齿圈固定、太阳轮输入、行星架输出时的传动比,为当太阳轮固定时、齿圈输入、行星架输出时的传动比,。由此可得,

而大齿轮d与爬升齿轮2同轴,故转速相 等, 即nd=nH, 则 内 外 齿 圈 的 转 速nb为:

将 式(10) 代 入 到 式(9) 中, 整 理 后 可以得到该行星差动机构传动比的计算公式为:

以上过程提供了该种行星差动机构传动比的计算方法及计算公式。由此可以看出,总的传动比与太阳轮、内外齿圈以及与齿圈啮合的大齿轮的齿数有关,且与同齿数的非差动行星机构相比,传动比变大。
4 结语
本文以一种双啮合升降装置为研究对象,对其进行了运动和动力学分析,得出以下结论。
(1)从力矩和传动比两个角度入手,详细分析了均载原理和条件。通过公式推理,得出了在设计双啮合升降装置时,若要实现两路输出爬升齿轮的快速响应及均载,太阳轮齿数、内外齿圈齿数以及大齿轮齿数应满足一定的要求,即
(2)从运动合成的思路考虑,分析推理出该种双啮合升降装置的传动比计算公式为
