多旋翼无人飞行器结构设计分析
2018-11-19于翔徐洋
于翔,徐洋
(中国人民解放军61267部队,河北 廊坊 065000)
多旋翼无人飞行器是一种体积小、操作简单、运动较为灵活的多旋翼无人机。它不仅仅在自然灾害,生态环境保护,测绘测量等上有重要的功能,而且还是航拍爱好者的一种娱乐手段。多旋翼无人飞行器在结构的设计上也是十分的复杂,只有进一步对多旋翼无人飞行器进行研究,找出其实现原理才能够实现功能的最大化。本文就以多旋翼中的四旋翼无人飞行器为例来进行设计。
1 多旋翼无人飞行器设计原则
1.1 设计合理
在设计无人飞行器的阶段时,需要考虑到两个方面,一是飞行器的整体结构需要满足飞行器的载荷要求,二是飞行器在进行运输时通常使用中小型汽车进行运输,因此它的包装尺寸必须要能够在汽车的运输体积范围内。因此,为了缩小飞行器的运输控制空间,通常飞行器的整体结构使用部件拆分和折叠的方式,以此达到缩小包装空间的目的。
1.2 设计材质要轻量
多旋翼无人飞行器的材质要达到两个要求,其一就是材料要轻质,其二就是材料要具有一定强度,能够满足升空设备的要求,并且保证它的主体机构能够具有一定的抗风能力和承载能力。
1.3 设计要具有工艺性
在设计飞行器的过程中,需要让结构具有工艺性,工艺性会影响整个飞行器的生产周期和制作成本。因此,尽量要使用性价比合适的材料。
2 四旋翼无人飞行器的原理
四轴飞行器与普通的直升机飞行结构模式并不一样,它主要是利用对固定旋翼来进行动力的提供和传输,对角的飞行旋翼所旋转的方向一致,而相邻的旋翼所旋转的方向不一致。这种设计的模式有两个优点,首先是能够利用正反螺旋桨之间的相互作用,然后将各个旋翼之间产生的反桨矩消除,从而飞行器维持在一个稳定的平衡飞行状态,并且也不用像直升机那种飞行模式,进行单独设计一个尾桨来保持飞机自身的旋转。针对直升机来讲,四轴飞行器将其飞行模式与机械构造进行简化了。
螺旋桨在进行旋转时,空气与桨叶会产生相对运动,因此引发的气流也会在桨叶上进行摩擦,并且在空气中流过桨叶的前后缘都会产生一定的压强差,并且利用这种压强差产生一定的作用力。一般情况下,将空气动力对螺旋桨产生的作用力可以分为阻碍螺旋桨旋转的阻力Q和向上的拉力P。然而因为螺旋阻力Q与桨轴间存在一定的距离,会导致桨叶与阻力的切向速度违背,从而形成了阻力力矩。根据螺旋桨片条理论,可以将空气动力系CP、CQ代入公式,能够计算出阻力Q与升力P的形式:
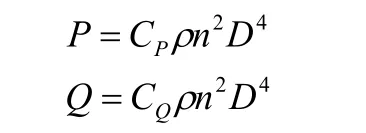
在上述公式中,ρ属于空气密度,n则代表的是螺旋桨转速,D是螺旋桨直径。利用上述公式,可以发现,若是螺旋桨与空气的密度为固定值时,阻力Q与升力P的大小会与螺旋桨产生的转速性成正比,若是转速越大,则升力也就越高。
因为四旋翼飞行器主要有偏航、俯仰、横滚以及油门这四个控制量,在控制方面,系统需要进行多自由度的运动,并且还要进行四个电机转速的控制,从而调节飞行的状态。四轴飞行器主要有四种飞行模式,分别为垂直运动、偏航运动、翻滚运动以及俯仰运动。
垂直运动相比于其他三种运动,其模式更加的简洁。如图1所示,螺旋桨上方的箭头表示的是拉力上升;边缘的箭头则表示的是螺旋桨旋转的方向。在四个电机进行相同功率的输出时,每一个电机产生的反扭力都是一样的,而相邻的电机所产生的反扭力方向相反,因此四个电机输出的合力上只存在于垂直方向上。若是升力P比机身的重量要大时,飞行器则会垂直向上;若是升力P与机身重量相等时,则飞行器会悬浮,若是升力P小于G时,则飞行器会垂直下降。
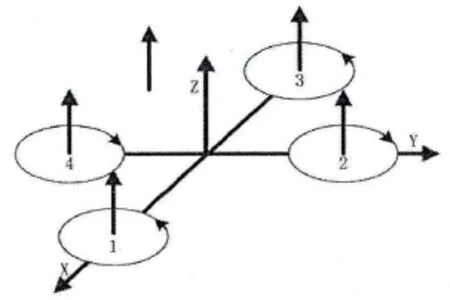
图1 垂直运动
3 多旋翼无人飞行器的设计方案
本文中给出了一种视频监控用折叠式四旋翼无人飞行器的结构设计方案,重点对飞行器的材料选择、任务载荷和系留缆绳安装以及起落架的结构进行了设计。在设计四旋翼无人飞行器的方案时,主要针对两种飞行器,即十字型和X型飞行器。本文中研究飞行器的设计方案的主要目的就是为了给飞行器设计提供参考意见。四旋翼飞行器拥有4个对称的螺旋桨,4个螺旋桨大小一致,并且有4个分布在螺旋桨支架端的电动机为螺旋桨提供飞行动力。在飞行器的机身上需要安装陀螺仪、感应器、GPS、加速度计、红外线测距装置和视觉感应系统,保证整个四旋翼无人飞行器的重心在四个螺旋桨重心的最中心的圆心上。
4 多旋翼无人飞行器的结构设计分析
多旋翼飞行器的设计需要符合飞行器的工作原理,在确定机身的回转半径时,需要来根据飞行器的中立比例和飞行工况来综合计算,细化控制系统设计完善飞行器的设计。飞行器设计中需要参考的一个重要数据和概念就是推重比,它是指机身中和推力的比值,如果推重比大于1,则飞行器就会正常飞行,反之小于1,飞行器的飞行状态会异常。另外四旋翼飞行器不仅要能够正常飞行,还要具有航拍功能,不仅如此,四旋翼飞行器的结构设计要紧凑。设计人员需要在确定推重比之后,对控制飞行器的电子设备进行设计,以此保证飞行器的尺寸合理、零部件正常。多旋翼飞行结构中的主体就是空中平台结构,它是由不同型号的碳纤维板材组成的,在选择材料类型时,可以使用三维编织的T300碳纤维复合材料,这种材料强度较高、重量较低。另外,为了减轻整个飞行器的重量,需要根据整个飞行器的载荷大小而调整设备舱主体碳纤维厚度。飞行器在执行飞行任务时需要根据项目要求来搭载挂载,而其中最常见的挂载就是相机云台,这就需要设计人员在设计过程中以快换、快拆为设计原则,统一机体和挂载的连接接口。
5 多旋翼无人飞行器的结构设计
5.1 材料的选择
空中平台结构是采用不同型号的板材和碳纤维管材搭建而成,板材和碳纤维管材使用的是三维编织T300碳纤维复合材料,此材料具有较高的强度和较轻的质量。为了让飞行器的机构重量轻便,设备舱主体的3层碳纤维板材的厚度依据载荷的大小,从上到下依次为1.5mm、2mm、1.8mm,并设计合理的减轻孔。支撑臂和起落架主要承受弯矩载荷,采用抗弯性能较强的碳纤维管材。任务载荷挂架及辅助竖梁等应力比较大的零件采用质轻强度高的航空铝合金材料7075-T651,此材料能够显著提高机构的强度,减轻机身机构重量。碳纤维复合材料编织的零件在铆接时会出现碎裂和压溃的问题,因此为了保证零件间的联接质量,复合材料零件均采用铝合金接头搭接。在进行搭建时,使用专用定位工装进行搭建。
5.2 任务载荷和系留缆绳安装
本文中设计的飞行器使用的任务载荷为高清摄像机,此摄像机能够覆盖到俯仰90°和水平360°度,让飞行器的摄像机能够给实现全方位的立体视频监控。根据飞行器上的任务载荷的安装接口和结构形式,要将其设计为法兰式。并且任务载荷吊舱底部是系留缆绳支架,上部有8个螺钉于设备舱进行连接。任务载荷吊舱采用铝合金7075-T651机加而成,整个吊舱的重量只有105g,完全满足了轻量化设计要求。
5.3 收放式起落架设计
四旋翼飞行器为了满足一些拍摄要求,会使得飞行器要收起起落架,使航拍视角能够不受阻挡。而且还要保证四旋翼飞行器安全着陆,使其具有吸收并耗散飞行器着陆垂直速度产生的动能。因此,在设计起落架时,不仅要实现飞行器的起落架的功能,还要设计收放机构。
6 结语
随着科学技术的发展,四轴飞行器不断的被运用于各种科技领域中。尤其在生活方面,有着更加广泛的发展前景。四轴飞行器本身就具备了多方面的科学技术,如电路设计、导航、自动控制、飞行动力学等。本文通过设计四轴飞行器的结构,首先详细分析了四轴飞行器的工作原理和设计方案,使飞行器能够满足拍摄需求,在未来的发展中能够得到广泛应用。
