三元组线列阵分裂波束目标方位跟踪方法
2018-11-15尹子源谭君红周胜增
尹子源,谭君红,周胜增
三元组线列阵分裂波束目标方位跟踪方法
尹子源,谭君红,周胜增
(上海船舶电子设备研究所,上海 201108)
针对单线阵进行弱目标跟踪时容易受到强目标影响的问题,将三元组线列阵进行分裂波束定向,可提高对弱目标的方位跟踪能力。通过将三元组线列阵等分为两个三元组子阵,对两个三元组子阵分别进行心形波束形成,利用各自心形波束输出进行分裂波束处理得到目标方位。与常规单线阵分裂波束目标跟踪方法相比,该方法不但能给出跟踪目标的左右舷信息,同时提高了不同舷侧存在多目标时的目标跟踪能力。对海试数据的实际处理结果表明,三元组线列阵分裂波束定向时提高了对多目标的方位跟踪能力。
水听器三元组;心形波束形成;分裂波束;方位跟踪
0 引言
分裂波束处理作为经典阵列处理技术,其定向精度接近于克拉美罗下界,不需增加太大的运算量即可显著提高声呐系统的测向精度,因此在水声中得到了深入研究和应用[1-4]。目前的研究以线阵分裂波束为主,而线阵存在左右舷模糊问题,因此基于线阵的分裂波束处理同样受到限制。90年代初,Jean Bertheas等[5]首次采用三水听器组的阵元结构来解决左右舷分辨问题。Y Doisy等[6]提出了基于三水听器组的利用噪声相关性的左右舷分辨方法。将三元水听器组作为一个小基阵,利用入射信号到达各个阵元的时延差和噪声相关模型,在左右舷抑制比最大准则下可以形成心形指向性图,从而实现左右舷分辨[6-9]。Erdal Mehmetcik[10]将三元组线列阵输出的目标方位和全球定位系统+惯性测量单元(Global Positioning System+Inertial Measurement Unit, GPS+IMU)数据进行比较研究,并给出了误差的主要原因。
鉴于三元组线列阵的优势,提出了将分裂波束处理和三元组线列阵相结合的方法,将该方法用于对目标方位的跟踪,旨在提高不同舷侧均存在目标时的目标方位跟踪能力。
1 分裂波束处理
设均匀线阵阵元数为,阵元间距为,声速为,入射声波频率为,入射波与线阵之间的夹角为。将线阵等分为子阵1和子阵2两个子阵,如图1所示。

图1 分裂子阵划分
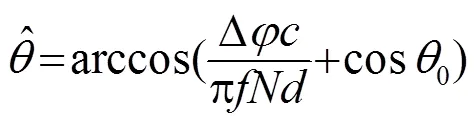
以0号阵元为参考阵元,则第(=0,1,…,-1)号阵元的接收信号相对于参考阵元接收信号的时间延迟为





2 三元组线列阵分裂波束处理
2.1 三元组线列阵左右舷分辨原理




根据信号检测理论,在最大似然比准则下,可得到三元组最优波束形成器系数的一般表达式为

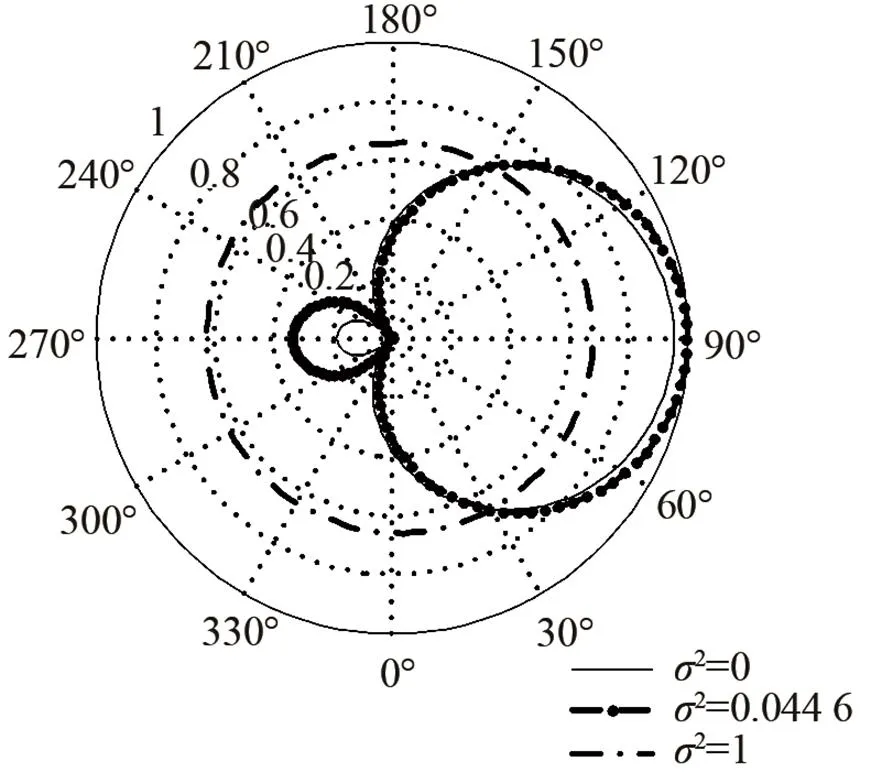
图3 理论计算的水听器三元组指向性图
2.2 三元组线列阵分裂波束方位估计
三元组线列阵分裂波束方位估计需要将三元组线列阵等分为两个三元组线列阵子阵,对两个子阵的左右舷波束输出信息分别进行互谱处理,得到左右舷相位差,根据相位差可估计左右舷侧目标的方位值。具体流程如图4所示。
3 试验数据处理
试验数据由拖曳式三元组线阵列得到,其中三元组线列阵结构为24×3。在试验过程中,除本舰外,右舷60º附近始终存在目标A,目标B自15 s开始出现,位于左舷75º。图5给出了线阵输出的时间方位历程图,图6给出了50 s对应的方位谱,由图6可以看出,目标B能量比目标A高约8 dB。

图4 三元组线列阵分裂波束处理流程图
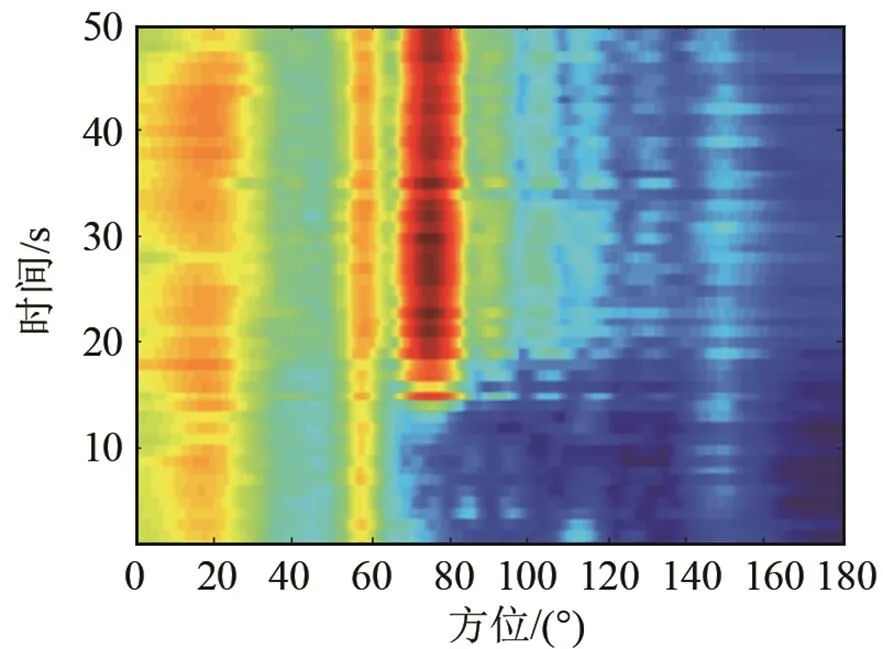
图5 单线阵输出时间方位历程图
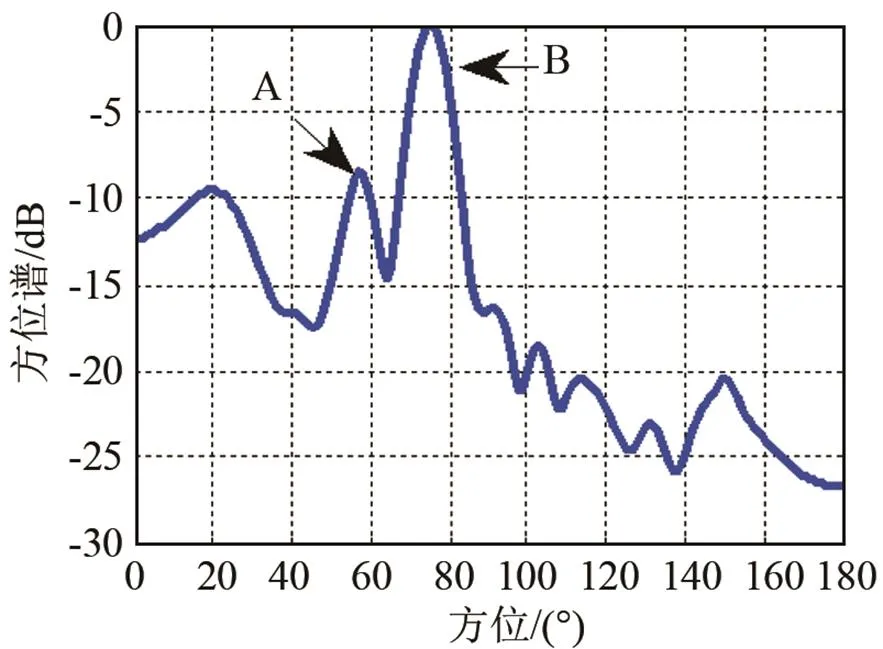
图6 单线阵输出方位谱
图7给出了单线阵分裂波束目标方位跟踪结果,可以看出,在75º方向强目标B出现后,弱目标A丢失。图8给出了三元组线列阵分裂波束目标方位跟踪结果,在左舷,目标B出现后可以正确跟踪目标B;在右舷,弱目标A的方位跟踪始终正确,没有受到强目标B的干扰而丢失。
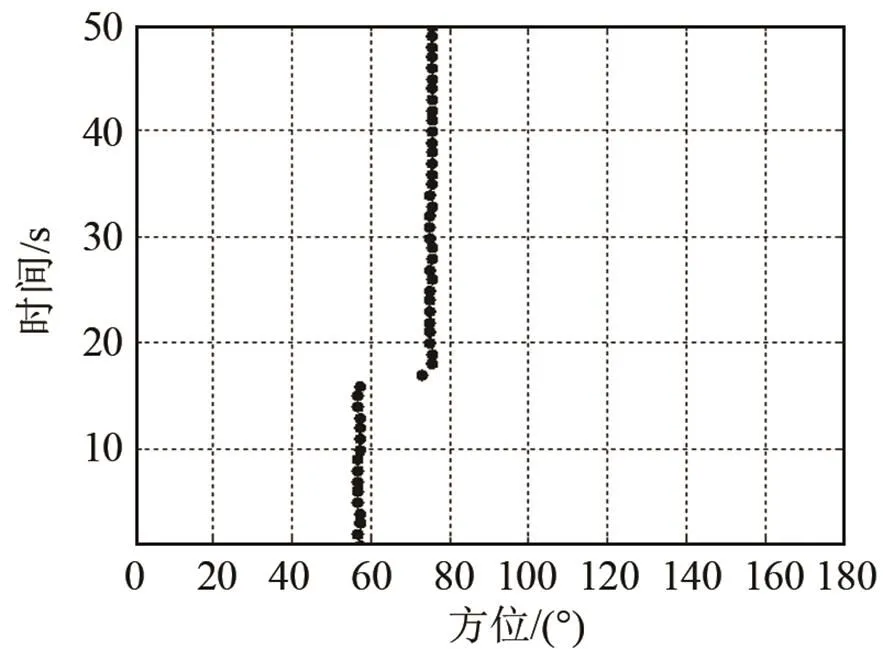
图7 单线阵分裂波束处理结果
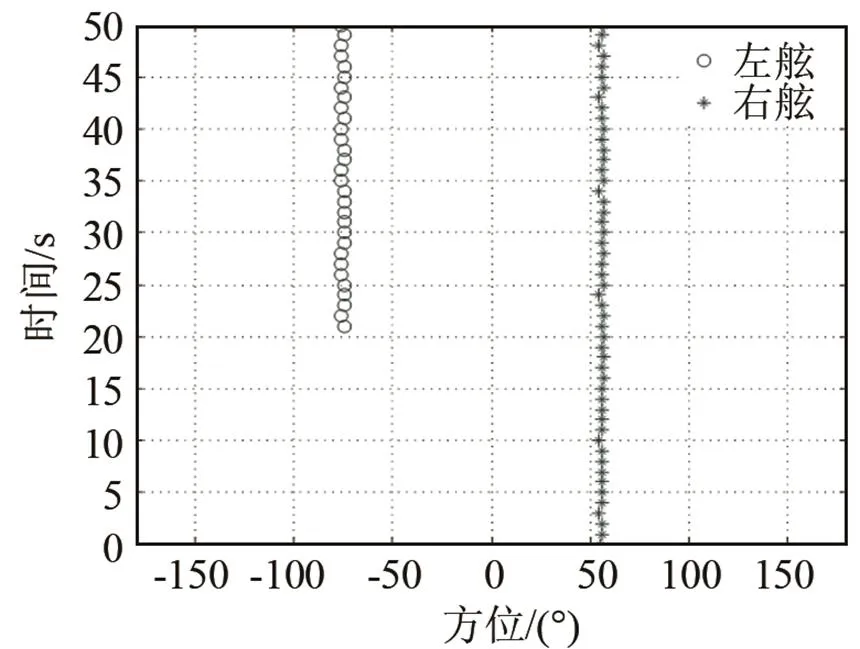
图8 三元组线列阵分裂波束处理结果
Fig.8 Results of split-beam processing for a triplet linear array
4 结论
本文将分裂波束处理扩展应用到三元组线列阵中,用于对不同舷侧的目标进行分别跟踪,给出了三元组线列阵分裂波束信号处理的详细流程,并对海试数据进行处理和分析。三元组线列阵分裂波束处理能够正确给出目标的真实方位和左右舷信息;同时该算法能够抑制不同舷侧多目标的相互干扰,可以有效提高对水下多目标的跟踪能力。
[1] STERGIOPOULOS S, ASHLEY A T. An experimental evaluation of split-beam processing as a broadband bearing estimator for line array sonar systems[J]. J. Acoust. Soc. Am, 1997, 102(6), 3556-3563.
[2] MILES D A, KIRK D, CLARKE T. A statistical analysis of the detection performance of a broadband splitbeam passive sonar[J]. IEEE Journal of Oceanic Engineering, 2006, 31(4): 986-996.
[3] 李启虎, 朴大志. 微弱信号源的和波束定向方法与分裂波束定向方法的性能比较[J]. 应用声学, 2007, 26(3): 129-134.
LI Qihu, PIAO Dazhi. Comparison of bearing accuracy of sum beam and split-beam in weak signal detection[J]. Applied Acoustics, 2007, 26(3): 129-134.
[4] 钱韬. 线阵分裂波束处理技术在水声探测中的应用[J]. 声学技术. 2015, 34(6): 552-555.
QIAN Tao. Application of split-beam processing of line array in underwater acoustics detection[J]. Technical Acoustics, 2015, 34(6): 552-555.
[5] BERTHEAS J, LOUBET V. Linear hydrophonic antenna and electronic device to remove right/left ambiguity, associated with this antenna[P]. United States Patent: 5058082. 1991.
[6] DOISY Y. Port-starboard discriminate on performances on active towed array systems[C]//UDT 1995 Europe: 125-129P.
[7] WAN MIERLD G W M, BEERENS S P, BEEN R, et al. Port/ starboard discrimination on hydrophone triplets in active and passive towed arrays[C]//UDT 1997 Europe: 176-181.
[8] 杜选民, 朱代柱. 拖线阵左右舷分辨技术的理论分析与实验研究[J]. 声学学报, 2000, 25(5): 395-402.
DU Xuanmin, ZHU Daizhu. Theoretical analysis and experimental research on port/starboard discrimination in towed line array[J]. Acta Acoustic, 2000, 25(5): 395-402.
[9] GROEN J, S P BEERENS, R BE, et al. Adaptive port-starboard beamforming of triplet sonar arrays[J]. IEEE Journal of Oceanic Engineering, 2005, 30(2): 348-359.
[10] ERDAL M. Comparison of detected target bearings from a triplet towed array with GPS and IMU data[C]//UDT 2015 Europe, 2446-2457.
A split-beam azimuth tracking method of triplet linear array
YIN Zi-yuan, TAN Jun-hong, ZHOU Sheng-zeng
(Shanghai Marine Electronic Equipment Research Institute, Shanghai 201108, China)
A split-beam bearing track method of triplet linear array is proposed in the paper, which can be used to improve the the weak target tracking performance of a single linear array. The triplet linear array is equally divided into two same sub-triplet linear arrays, then the heart-shaped beamforming is carried out respectively for the two sub-triplet linear arrays, and the target azimuth is obtained by using split-beam processing with the respective heart-shaped beam outputs. This method can not only give the target’s port-starboard information, but also improve the performance of tracking target when there are many targets on different sides. Results of sea trial show that the proposed method has an excellent multi-target tracking ability.
hydrophone triplet; heart-shaped beamforming; split-beam; azimuth tracking
TB556
A
1000-3630(2018)-05-0425-04
10.16300/j.cnki.1000-3630.2018.05.004
2017-09-12;
2017-12-04
尹子源(1982-), 男, 黑龙江五常人, 高级工程师, 研究方向为拖曳式线列阵。
谭君红, E-mail: tanjunhong621@163.com