智慧化客车上水装置的研究与设计
2018-11-14王健赵梦丁道祥王伟
王健,赵梦,丁道祥,王伟
(中国铁路沈阳局集团有限公司科学技术研究所,辽宁 沈阳 110013)
列车上水是铁路旅客运输中的一项重要工作,当列车到达上水车站时,车站作业人员为每节车体的水箱注水,以保证旅客的用水需求。目前全路各铁路局的大多数车站已开始安装智能化客车上水装置,可以实现电动收管、远程遥控上水和停水、冬季自动加热。但是,上水作业时仍需由人工将上水软管接到客车水箱的注水口上,当开始溢流时,关闭上水栓阀门,拔下上水软管,上水作业结束。该方式具有浪费水资源、损坏路基、劳动强度高、存在安全隐患等许多弊端。
为了改变此种状况,本文提出了一种智慧化客车上水的技术方案,可以实现上水装置自动识别车体注水口位置,上水软管与车体注水口自动对接,自动判断水箱满水、脱管及收管。
1 作业环境
由于车站线路两线间的设备多、路面不平坦、冬季易结冰,若采用移动式机器人自动上水,对机器人的要求非常高,必须适应崎岖路面和冰面的路况,否则容易发生机器人的倾覆事故。若采用在高站台侧面上安装移动式上水接口的方式,借助某些技术手段实现自动搜索车体的注水口,这需要将高站台做成中空,里面放置给水设备和管道,仅适用于新建的客运高站台车站。
从安全性和经济性的角度考虑,采用轨旁限界外安装固定式导轨的方案,适用于各种类型车站的站台,施工难度小、成本低,安全性和可靠性高。
2 技术方案
智慧化客车上水装置共分为3部分:机械运动机构、识别对接及水满判断。
根据车站作业的环境特点,机械运动机构部分采用轨旁安装导轨,机械臂沿导轨移动的技术方案;识别对接采用射频识别和接近传感器的技术方案;水满判断采用无线收发的技术方案。
2.1 机械运动机构
2.1.1 导轨
在轨旁符合限界要求的位置安装金属导轨(如图1所示),导轨用于承受、固定、引导移动装置即机械臂。本方案采用线性导轨,用于直线往复运动,拥有比直线轴承更高的额定负载,同时可以承担一定的扭矩,可在高负载的情况下实现高精度的直线运动。
导轨作为导向装置,应具有下列性能。
导向精度:主要指导轨运动轨迹的精确度,直接关系着上水软管与注水口的自动对接能否成功。影响导向精度的主要因素有:导轨的几何精度和接触精度,导轨结构,导轨及其支撑部件的刚性,静态(动态)压导轨之间的油膜厚度及其刚度。
精度保持性:主要由导轨的耐磨性决定。耐磨性与导轨的材料、导轨副的摩擦性质、导轨上的压强及其分布规律等因素有关。

图1 导轨结构图

图2 机械臂总体结构图
刚度:包括导轨的自身刚度和接触刚度。主要取决于导轨的形状、支撑构建的尺寸和连接方式以及应力条件等因素。
低速运动的平稳性:当可移动导轨用于低速运动时,容易产生摩擦自激振动,即爬行现象。爬行会降低定位精度或增加被加工工件表面的粗糙度。
2.1.2 机械臂
机械臂主要包括旋转机构、升降机构、伸缩机构及夹取机构共4部分,总体结构如图3所示。机械臂各个动作的实现全部由步进电机驱动完成,各个步进电机的动作指令由控制终端通过电机控制器来下达。
2.2 旋转机构

图3 旋转机构结构图
旋转机构的主要功能是当接到“上水”命令后,带动升降机构、伸缩机构及夹取机构进行90°旋转,使伸缩机构靠近注水口。
旋转机构固定于导轨上,主要原理是通过同步进电机驱动减速齿轮组带动安装于其上的机构进行旋转。
2.3 升降机构
升降机构的功能主要是用于调整上水软管与车体注水口的相对高度。
升降机构主要由步进电机、丝杠、辅助杠、承重平台、上下底座组成。其原理是通过步进电机驱动丝杠转动,将旋转运动变换为直线运动,步进电机的正反转实现承重平台的上升和下降,如下图4所示。

图4 升降机构结构图
2.4 伸缩机构
伸缩机构的功能主要是用于调整上水软管与车体注水口的水平距离。
伸缩机构固定在升降机构的承重平台上,主要是应用线性滑轨滚珠丝杠直线导轨,通过步进电机的正反转实现夹取机构的前进和后退,如图5所示。
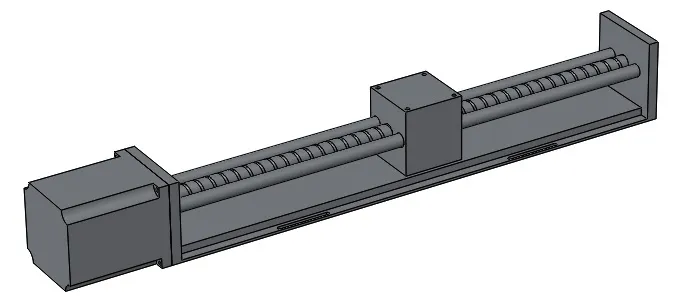
图5 伸缩机构结构图
2.5 夹取机构
夹取机构的功能主要是用于夹紧上水软管,带动上水软管与机械运动机构同步运动。
夹取机构固定在伸缩平台上,其主要结构是模仿人手抓取动作进行设计,通过人工转动丝杠,实现夹紧和松开注水软管,如图6所示。
2.6 识别对接
2.6.1 注水口位置识别
注水口位置识别采用射频识别技术,车辆注水口位置两侧一定距离内,各固定1个RFID标签,上水装置安装标签扫描识别设备。
列车进站停车后,上水装置接收到“开始上水”的指令,机械臂沿导轨向注水口位置运动,当机械臂上的标签扫描识别设备同时接收到车辆注水口两侧固定的2个RFID标签信息时,机械臂停止运动,即上水装置对准注水口的位置。

图6 夹取机构结构图
2.6.2 上水软管与车体注水口的对接
机械臂的伸缩机构共安装4个接近传感器,分为横向识别1个、纵向识别2个、垂向识别1个。车辆注水口安装4块接近传感器识别金属板。
当上水装置成功对准注水口位置后,机械臂的升降机构开始上升一定距离并停止运动。伸缩机构开始伸长直至横向识别接近传感器发出信号停止运动,表明已经上水软管与车体注水口在横向上对准;机械臂开始向无信号输出的纵向识别接近传感器方向运行,直至2个纵向识别接近传感器均发出信号,机械臂停止运动,表明已经上水软管与车体注水口在纵向上对准;机械臂的升降机构开始上升,直至垂向识别接近传感器发出信号停止运动,表明上水软管与车体注水口自动对接成功,开始上水。
2.7 水满判断
水满判断是智慧化客车上水装置的重要组成部分。当客车水箱水满时,自动停止上水,从而达到避免水资源浪费的目的,如图7所示。

图7 水满判断原理图
水满判断的实现,主要是基于水位传感器及无线收发装置。首先,客车水箱内安装高精度水位传感器,用于水箱内水位的监测;然后,客车上安装的无线发射装置将采集的水位数据实时传送给地面的无线接收装置;最后,控制终端接收地面无线接收装置传输来的水满信号控制客车上水栓停止上水。
3 实现目标
智慧化客车上水装置的研制目标主要是实现客车上水的全自动化。当列车进站停靠在站台旁后,车站中控室的上水工作人员点击控制主机的开始按钮,上水装置自动完成注水口位置的搜索、上水软管与注水的对接、上水、水满自动停止、脱管及收管等工作。同时,智慧化上水装置具备人工模式和自动模式,在设备发生紧急故障时,能够切换到人工模式,进行人工手动上水,保障客车上水工作的正常进行。
4 结语
虽然铁路客车上水装置全自动化的研究存在一定的技术难度,但是铁路装备的智慧化势在必行。若智慧化客车上水装置研制成功并投入使用,将大幅减少人力成本、缩短上水时间、提高车站的上水效率,节约大量的水资源,保障上水工作的安全快捷,彻底改变铁路客车上水的面貌,在取得经济效益的同时,对环境和社会也将产生很大的效益,为推动铁路装备智慧化的发展起到积极作用。
