新型虚拟同步发电机分布式主动支撑控制策略*
2018-11-13王立王艺博何国庆
王立,王艺博,何国庆
(1.东北电力大学 电气工程学院,吉林 吉林 132012;2.中国电力科学研究院 新能源与储能运行控制国家重点实验室,北京 100192)
0 引 言
随着新能源装机和发电容量的不断增加,微电网和分布式发电得到了越来越多的关注[1-3]。与同步发电机相比,作为分布式发电并网主要连接装置的电力电子逆变器响应速度快,不存在有利于系统稳定的旋转惯量和阻尼分量,无法为电网提供电压和频率支撑,也无法参与电网的调节过程[4-5]。为了提高分布式发电系统和高比例新能源电网的运行特性,并将传统电网的运行控制策略应用于微电网中,有学者提出虚拟同步发电机概念[6-7],将同步发电机的电压和频率特性引入到逆变器的控制器中,以模拟其外特性。
文献[8-9]提出了应用于并网逆变器的下垂控制策略。下垂控制模拟同步发电机的Q/U和P/f下垂特性,在功率环节引入输出电压幅值和频率的偏差反馈,使得并网逆变器在离网模式下能根据此偏差和自身额定功率共同分担负荷功率。在并网模式下,下垂控制能够通过调整逆变器输出电压来调节输出有功和无功功率,能够为电网提供必要的有功和无功功率支撑。文献[10-11]在控制器结构中加入虚拟阻抗环节,虚拟阻抗降低了线路参数对下垂控制的干扰,能精确微电网电源点的功率分配,有效抑制环流。下垂控制模拟了同步发电机的外特性,多逆变器协同工作时不需要通信线,但并没有模拟同步发电机的电磁特性和机械特性。文献[12-14]借鉴同步发电机的电磁方程和转子运动方程来控制并网逆变器,提出了虚拟同步发电机(Virtual Synchronous Generator,VSG)控制策略,使得并网逆变器的机理、外特性和调节过程都类似于同步发电机。虚拟同步发电机能主动地参与电网中调压调频过程,提高分布式电源高渗透的电网动态特性和电能质量。文献[15]分析了弱电网下并网逆变器的输出特性,提出了一种具有类似同步发电机的自同步能力的控制策略,避免了使用锁相环而造成的不稳定,并能够稳定弱电网电压。文献[16-17]建立了并网逆变器的小信号模型,证明了一定条件下,VSG的有功环和无功环是近似解耦的,并优化了控制器的设计和参数选取并兼顾系统的稳定性、动态性能。
文中在上述文献的基础上,优化了同步发电机的建模过程,通过模拟同步发电机的励磁调节和定子绕组电气特性,以及机械运动过程,提出了一种新型虚拟同步发电机控制策略,并给出了完整的励磁器和调频器设计方法。该控制策略具有较好的电压、频率调节和恢复能力,有利于电网的稳定并具备一定的限制故障电流能力。利用PSCAD/EMTDC仿真和实验装置验证了所提控制策略的有效性,为分布式电源逆变器接口的运行控制提供了新的有效途径。
1 同步发电机建模
本节进行三相对称同步发电机动态模型的建立。为简化分析,模型建立于隐极式同步发电机,故定子绕组自感和互感为常数,并忽略阻尼绕组的作用、铁芯的涡流和磁饱和现象。图1为隐极式同步发电机绕组等效结构。
输出电压和电流以及励磁电流iF参考方向如图1所示。定、转子间互感由转子角决定,即:

图1 隐极式同步发电机绕组等效结构
(1)
定子绕组可视为具有自感L和互感M的电感,其磁链为:
(2)
对于三相对称绕组,定子绕组间互感M等于1/2L,故定子磁链可表示为:
(3)
(4)

(5)
由式(5)可知,调节励磁电流iF就可以相应地调节输出电压的大小。在电压动态调节过程中,励磁电流iF不为常数,因此建模时仍应考虑励磁电流的微分量。
由转子运动方程可建立同步发电机机械转动模型:
(6)
式中Tm为机械转矩;Te为电磁转矩;J是转子惯性时间常数;D是阻尼系数;ωs是电网电压角频率;电磁转矩可由输出电磁功率Pe,得:
(7)
2 新型虚拟同步发电机控制策略
介绍一种新的虚拟同步发电机控制策略的设计方法。图2所示为三相两电平逆变器的电气结构,其包含采用脉宽调制的三相桥臂和用以消除电压纹波的LC滤波器。可将滤波电容输出侧视为同步发电机的输出端口,通过控制滤波电容电压来模拟同步发电机的外特性。

图2 逆变器电气结构
控制策略可分为三部分:励磁器、调频器和内环控制器。励磁器控制虚拟同步发电机输出无功功率或输出电压幅值,调频器控制输出有功功率或输出电压角频率,内环控制器实现控制快速性并限制故障电流。另外,励磁器和调频器还具有自同步、电压频率支撑、负荷分配、环流抑制能力。所提出的控制框图如图3所示。
2.1 励磁器
励磁器考虑励磁电流的动态特性,结合虚拟转子坐标系,对式(4)和式(5)进行abc静止坐标系到dq旋转坐标系转换,可得dq旋转坐标系下同步发电机输出电压和内电势如式(8)和式(9)。虚拟转子坐标系如图4所示。
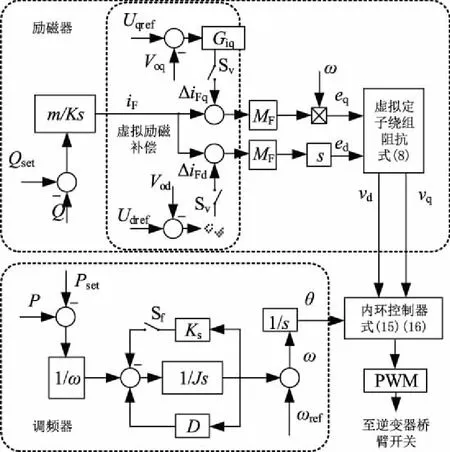
图3 虚拟同步发电机控制框图

图4 虚拟转子坐标系
定义q轴超前d轴90°,a相与d轴重合,δ为内功率因数角。
(8)

(9)
式中Rs、Ls为虚拟定子绕组电阻和电感。其中,eq分量反映出励磁电流变化时对基波电势的扰动。
逆变器输出无功功率和电压之间应满足下垂关系,如图5(a)所示。
由式(9),内电势由励磁电流iF决定,励磁电流由输出无功功率Q与无功功率给定值Qset的偏差量得到,即:

图5 输出功率的下垂曲线
(10)
式中m为无功功率下垂系数,并在控制器中加入积分环节1/Ks以实现无功功率的无差控制。
对于闭环控制的VSG,其闭环输出阻抗由其开环输出阻抗和闭环参数共同决定,虚拟定子绕组环节可以调整逆变器的输出阻抗,解决线路阻抗中阻性成分带来的功率耦合问题,满足虚拟同步发电机的功率解耦条件。虚拟定子绕组能减弱线路参数对下垂特性的影响,合理的设计虚拟定子绕组阻抗值,有利于并联组网运行的逆变器的负荷分配。同时,虚拟定子绕组的设置可实现并联逆变器间环流和故障电流的限制。
在无功负载过大时,因下垂特性,励磁电流减小,内电势降低,使得逆变器输出电压不满足要求。此时可在励磁器中加入输出电压前馈进行励磁电流补偿,修正内电势,如:
(11)
式中ΔiFd、ΔiFq为d轴、q轴虚拟励磁电流补偿量,分别由额定电压的d、q轴分量Udref和Uqref与输出电压的d、q轴分量Vod和Voq的偏差经过比例积分(PI)环节得到。在控制器中,闭合开关Sv,即可补偿励磁电流,修正输出电压参考值,在稳态时使得输出电压Vodq等于电压额定值Udqref。
2.2 调频器
调频器可实现对电网频率和相位的追踪。稳态时,输出有功功率和电压频率之间满足下垂关系,如图4(b)。机械转矩Tm和电磁转矩Te之差使得转子角频率变化,改变输出相位θ。输出相位θ决定abc到dq坐标系的变换。利用转子运动方程,可设计输出功率和频率之间的惯性关系,模拟同步发电机的一次调频过程。输出电压角频率的增量正比于输出功率与给定值的差值。稳态时,频率增量为:
(12)
由此,可设计调频器为:
(13)
式中Pset为有功功率给定值;P为逆变器输出功率;对应于电磁功率Pe。
同步发电机中,通过调整原动机输出功率来修正频率特性曲线,消除一次调频的静差,使得系统频率恢复为额定值。
(14)
虚拟同步发电机中,闭合开关Sf,通过前馈频率增量经比例环节修正Pset,调整直流侧输出功率,如式(14),从而实现二次调频。
2.3 内环控制器
内环控制器采用基于dq解耦的电压电流双闭环控制器,分为电压外环和电流内环。在电压环中,采用PI控制器来调节滤波电容电压,并得到电流参考值。
(15)
电流环通过P控制器调节滤波电感电流,如:
(16)
为防止暂态时的过电流损害设备,应限制电流参考值iLdref、iLqref。通过解耦项来实现d、q轴电压电流的独立控制,抵消滤波电感上的压降。
3 虚拟同步发电机的工作模式
3.1 输出无功功率和电压调整
虚拟同步发电机的输出无功功率增量和输出电压幅值增量满足Q/V下垂关系,并联系统中,下垂系数m决定着负荷无功功率在逆变器间的分配。
在孤岛模式下,输出功率由负载决定,当负载过大时,虚拟同步发电机的输出电压可能不满足要求(输出电流过大会使得虚拟定子绕组阻抗上压降过大,无功负载过大也会造成励磁电流的降低)。此时,闭合开关Sv,输出电压偏差经过比例积分环节对虚拟励磁电流iF进行补偿,分别对d、q轴内电势经行修正,以消除输出电压幅值误差。
3.2 输出有功功率和频率调整
在同步发电机中,当负荷有功功率增加时,机械转矩增加,转子转速被拖慢。其角频率变化的程度决定于阻尼系数D,阻尼系数和转子惯性时间常数J决定频率惯性环节的时间常数τ,输出有功功率和频率之间满足P/f下垂关系,即:
(17)
通常,时间常数τ越大,则同步发电机的机械旋转惯量越大,储存的机械能越大。对于虚拟同步发电机,时间常数τ反映系统的惯量,系数D阻尼功率振荡。
在并网状态下,若同时打开二次调频开关Sf和虚拟励磁补偿补偿开关Sv,则虚拟同步发电机运行于恒定有功无功功率(PQ)模式,此时输出功率由功率参考值决定,输出电压受限与交流母线,输出侧相当于PQ节点。若打开开关Sf闭合开关Sv,则虚拟同步发电机工作于恒有功功率、恒电压(PV)模式。在组网模式下,若同时闭合开关Sf和开关Sv,则VSG进入恒压恒频(Vf)模式。由此可知,VSG不仅具有更统一兼容的控制接口,也方便引入电力系统中相关控制理论和方法。
4 时域仿真与实验验证
4.1 时域仿真
在PSCAD/EMTDC环境中搭建20 kVA逆变器模型,以验证上述虚拟同步发电机控制策略。选取阻尼系数D为50,有功功率指令每增加1 kW,频率增加0.063 6 Hz。选取转子惯性时间常数J为0.3,则频率惯性环节时间常数τ为0.006 s。励磁电感Mf为3.18e-3,无功下垂系数m为0.005。仿真时间步长为5 μs。逆变器主要参数如表1所示。
在本仿真中,虚拟同步发电机的交流侧直接与微电网交流母线连接。仿真由t=0 s时刻开始,有功功率指令Pset和无功功率指令Qset均为0,在t=0.3 s时刻Pset变为10 kW,在t=0.3 s时刻Pset变为20 kW,在t=0.9 s时刻Qset变为2 kvar,在t=1.5 s时刻Pset变为10 kW。可见,输出功率均随功率指令变化,且有功/无功功率指令变化时,输出无功/有功功率也有小幅变化,但很快恢复到指令值。输出频率随Pset变化以调整逆变器输出电压相位。
由图6、图7可见,在功率指令阶跃时,输出功率随之上升,可知所提的虚拟同步发电机控制策略有较好的功率跟踪能力。

表1 逆变器主要参数
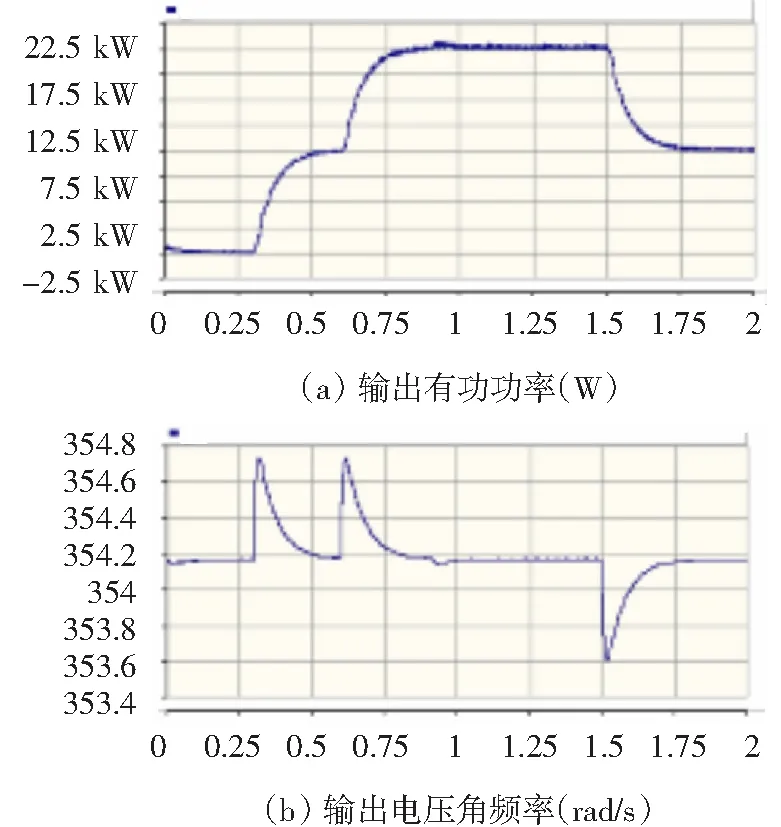
图6 逆变器输出有功功率和电压频率

图7 逆变器输出无功功率和电压标幺值
4.2 实验验证
搭建一台三相逆变器以验证上述虚拟同步发电机控制策略。控制器主要参数选取同仿真参数。逆变器桥臂开关采用SiC-MOSFET,开关频率20 kHz。控制器DSP采用TMS320F28335,A/D转换芯片为AD7865BS-1。电压互感器为LV25-P,电流互感器为HAC-400-S。DSP数据通道采样间隔时间为50 ms。逆变器电路主要参数如表2所示。
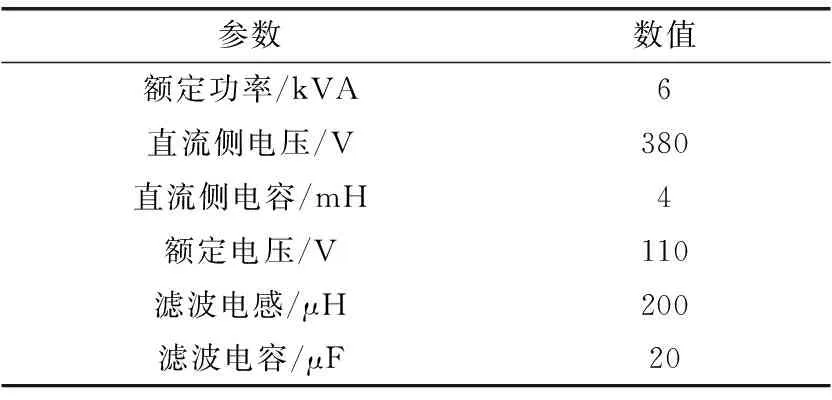
表2 实验逆变器主要参数
实验过程分为两部分。第一部分:初始状态时逆变器接入6 kW有功负载,此时设定有功、无功功率指令Pset和Qset分别为6 kW和0 kvar,在t1时刻退出3.5 kW有功负载,在t2时刻接入1.1 kW有功负载。逆变器输出有功功率和输出电压角速度如图8所示,经过调频器环节,角速度随着输出有功功率的减少而增加。t1时刻输出电压电流如图9所示。

图8 输出有功功率和输出电压角速度
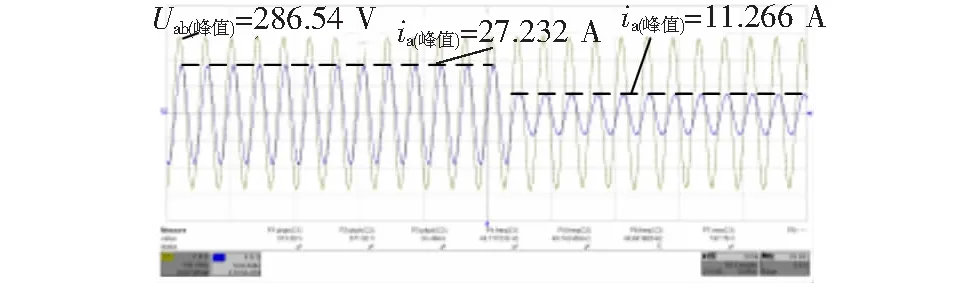
图9 t1时刻输出线电压和A相输出电流
在t3时刻接入3 kvar无功负载,在t4时刻退出0.75 kvar无功负载。输出功率和输出电压幅值d轴分量如图10所示。

图10 输出功率和输出电压d轴分量
可见,随着输出有功功率的下降,输出电压角速度上升,满足频率下垂关系。投入无功负载后,输出电压下降,满足电压下垂关系。
第二部分:同t1时刻一样退出有功负载,此时电压角速度随之升高,在t5时刻闭合开关Sf,以验证二次调频环节,如图11所示,在有功负载不变的前提下,输出电压角速度恢复到额定值。同t3时刻接入无功负载,输出电压受励磁器控制随之下降,在t6时刻闭合开关Sv,验证虚拟励磁补偿环节,如图12所示,输出电压静差很快被消除,恢复到额定值。可知,所提的虚拟同步发电机不仅能够在负载变化时为电网提供电压和频率支撑,还具有电压和频率二次调整能力。
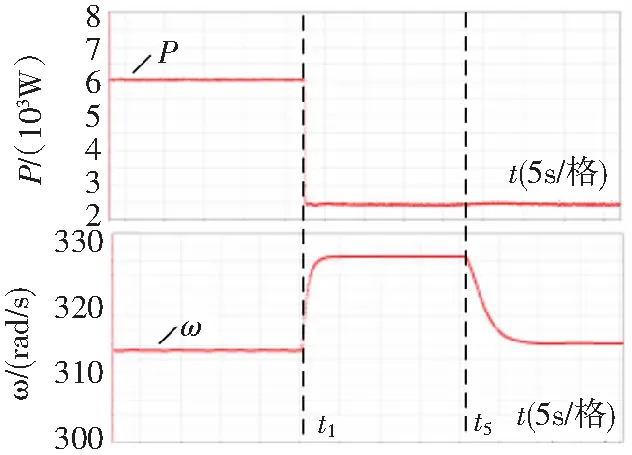
图11 输出有功功率和输出电压角速度

图12 输出功率和输出电压d轴分量
5 结束语
结合虚拟定子绕组概念,提出了一种适用于新能源并网分布式发电的新型虚拟同步发电机主动支撑控制策略,得到以下结论:
(1)所提出的虚拟同步发电机控制策略具有与同步发电机相似的有功和无功调节能力,能够为电网提供一定的惯性和阻尼,有利于电网的稳定;
(2)所提出的虚拟定子绕组环节可以调整逆变器的输出阻抗,解决线路阻抗中阻性成分带来的功率耦合问题,同时能减弱线路参数对下垂特性的影响,合理的设计虚拟定子绕组阻抗值,有利于并联组网运行的逆变器的负荷分配;
(3)仿真和实验结果都验证了所提的虚拟同步发电机控制策略的可行性和有效性,为新能源微电网控制的发展提供了新的方法。
