动车组开闭罩智能化组装工艺可行性分析研究
2018-11-11赵峻松阳云帆杜立侠黄荣素张艳秋
赵峻松, 阳云帆, 杜立侠, 黄荣素, 张艳秋
(1.中车广东轨道交通车辆有限公司,广东新会529100;2.广州铁路(集团)公司,广州510088)
0 引言
动车组开闭罩又称为动车组头部导流罩,其流线形外部造型符合空气动力学原理,左右开闭罩开启后便于车钩连接其它动车车辆,是动车组头部的关键部件[1]。CRH6型动车组开闭罩体积大,物料重,而目前动车组开闭罩组装主要依靠人力搬抬。现行的开闭罩组装工艺,需要3人协同作业:两人搬抬开闭罩并对准动车组车体安装位置,一人负责安装紧固件;生产效率低,纯人力搬抬重物的劳动强度大,长时间的搬抬重物造成人力疲劳,同时易造成安全事故。
为了实现提高组装工艺的稳定性、作业安全性、生产效率和降低操作工劳动强度,有必要改进现行开闭罩的组装工艺,本文设想利用真空吸盘智能机器人代替人力来组装开闭罩,实现开闭罩智能化组装,提高组装效率,节约人力,避免安全隐患。
1 工业机器人概述
机器人是一种通过编程,可以自动完成一定操作或移动作业的机器装置。或者更确切地说,像人的上肢那样高度灵活,能做复杂动作的机械[2];它能接受人的指令而进行作业,也能按预先编排的程序工作;它的任务就是协助或取代人类的工作,机器人的应用范围涵盖制造业、建筑业、航天航空、物流业、运输业、文体教育等多个领域;特别是在一些高危环境、污染环境中,机器人取代人类工作,彰显意义非凡。
机器人英文名称Robot,原意为“工人”,由于在工业领域中机器人广泛地取代了工人,所以被称为工业机器人。
机器人技术涉及机械、电子、计算机、材料、传感器、控制技术、人工智能、仿生学等多门学科,机器人的发展是目前科技发展最活跃的领域之一。发展应用机器人的目的在于:1)提高生产效率,降低人的劳动强度;2)机器人做人不愿意做或做不好的事;3)机器人做人做不了的事情[3]。
随着工业机器人的应用与发展,传感器技术在工业机器人上广泛使用,使机器人能够利用传感器感知外部世界,然后依靠自身的智能对外部环境的变化作出反应,这种机器人被叫做智能机器人;智能机器人的四大组成部分为主控制器、传感器、驱动器、执行器[4],一些机器人的执行器类似人类的手臂,现代工厂中的焊接机器人、喷漆机器人、搬运机器人一般都装有一只灵活、强壮的“手臂”,称为机械手,本文所述的真空吸盘机械手属于智能机器人的一种带有真空吸盘的机械手。
2 吸盘机器人在动车组装行业中的应用现状
真空吸盘机器人在很多领域中应用非常广泛,比如汽车制造行业的玻璃组装机器人、车门组装机器人,船舶制造行业的搬运机器人等。真空吸盘机器人能模仿人手和臂的某些动作,可以按照固定的程序抓取、搬运物件、操作工具,完成特定的工作。特别是在一些高温、重负荷等恶劣的环境中,人力操作劳动强度大,易发生安全事故,真空吸盘机器人取代人力搬运物料和产品,能够降低人力成本、劳动强度,避免安全事故,提高生产效率。
虽然真空吸盘机器人在国内外很多行业与领域里应用广泛,但是目前在国内动车组装行业的大设备组装中使用较少。目前我司的CRH6型动车组开闭罩、车门、裙板等大部件组装工艺自动化程度不高,组装时主要靠人工抬着装上车体。所以利用吸盘机器人技术改进动车组大设备组装工艺、实现智能化生产势在必行。
3 开闭罩智能化组装的技术方案
开闭罩智能化组装的技术方案是利用吸盘机器人来搬运和组装动车组开闭罩。吸盘机器人系统分为吸盘机械爪、工业机器人、移动平台等三部分。吸盘机器人系统工作原理如图1所示,采用1台工业机器人,机器人装置上带多个真空吸盘的机械爪,利用可万向移动的电动小车装载机器人;操作人员可利用遥控器指挥小车任意移动,可指挥吸盘机械爪抓取开闭罩实施短途搬运和装配作业。
由于开闭罩外形轮廓面为不规则曲面,所以必须设计专用的吸盘机械爪装置,图2为设计好的专用的开闭罩吸盘机械爪装置,机械爪装置上装有多个真空吸盘,真空吸盘机械爪工作原理如图3所示。
真空吸盘的工作原理是在吸盘和工件之间产生一个真空负压,由于压力差,工件被反压在吸盘上;多个真空吸盘通过气管连接真空压力开关、单向阀、2位3通常通电磁阀、真空过滤器、真空泵,真空泵使吸盘和工件之间区域产生负压;真空压力开关打开后,吸盘松开工件;单向阀保证气路单向流动,防止空气进入吸盘工作区;单向阀、2位3通常通电磁阀用于转换气流方向;真空过滤器过滤掉气流中的灰尘和杂质,保护真空泵。
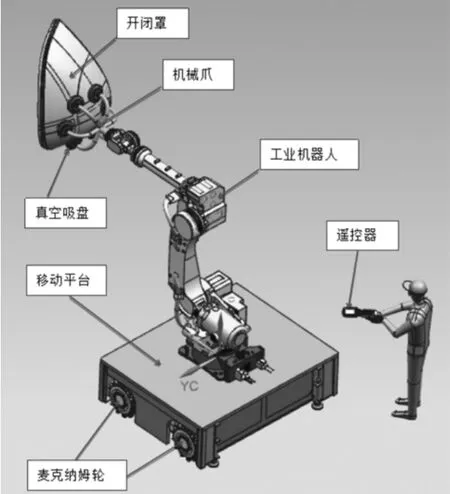
图1 吸盘机器人的工作原理图
采用6轴工业机器人,工作范围能到达空间任意位置;开闭罩理论质量为54 kg,只要选择一台承载能力为100 kg左右、运动半径2 m左右的机器人即可满足使用要求。
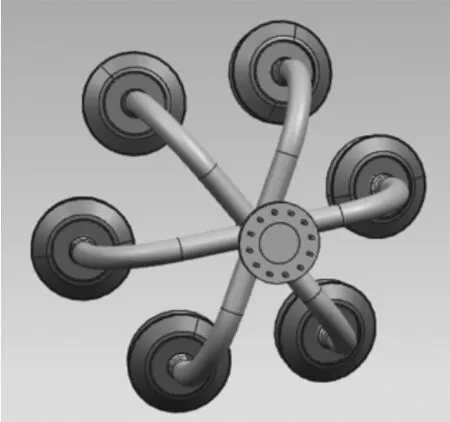
图2 机械爪装置
移动平台安装有4个麦克纳姆轮和驱动电动机,能支撑吸盘机器人和搬运的重物的总质量。每个麦克纳姆轮带有一个驱动电动机,工作时4个电动机根据系统的指令,能各自以各种不同的速度正转、反转,促使麦克纳姆轮滚动和滑动,可使移动平台在地面上向任意方向行走,还能原地360°旋转。这种移动平台移动灵活方便,能在地面上任意位置作业。
整个系统的工作原理:由1名操作员利用遥控器指挥移动平台行走到开闭罩存放区域;接着利用遥控器指挥吸盘机器人抓取一个开闭罩;然后再指挥移动平台移动到动车组头车位置,利用遥控器指挥机器人将开闭罩安装孔与动车组车体上的安装孔一一对齐;操作员指挥机器人锁定开闭罩不动作,装配好紧固件;最后指挥吸盘机器人松开开闭罩,并指挥移动平台撤离工作现场,进行下一项工作任务。
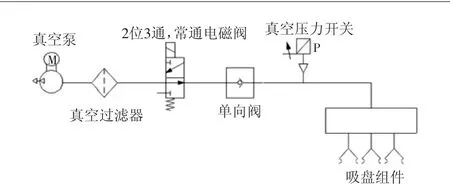
图3 真空吸盘工作原理图
利用吸盘机器人进行开闭罩组装仅仅是智能机器人在动车组行业应用场景之一,我们同样可以采用以上技术方案进行动车组塞拉门、裙板、车下小设备等部件的组装,即在动车组组装的多个工序中利用智能机器人取代工人而实施智能化生产。
4 智能化生产的预期经济效益
智能化生产的主要特点是“机器换人”。机器换人是以现代化、自动化的装备升级传统产业,利用机械手、自动化控制设备或流水线自动化对企业进行智能技术改造,实现减员、增效、提质、保安全的目的。通俗地说,机器换人就是在用工紧张和资源有限的情况下,通过提升机器的办事效率,来提高企业的产出效益[5]。同理,在动车组组装工序中,实施“机器换人”的智能化组装也能给企业带来较高的经济效益。采用本文所述的技术方案对动车组几个工序实施智能化组装,实现了预期综合经济效果。
动车组现行组装工艺中:开闭罩需要3人,其中2人搬抬,另外1人安装紧固件;塞拉门需要4人搬抬,另需1人安装紧固件;裙板需要2人搬抬,另需1人安装紧固件。
而使用智能化机器人可供开闭罩工序、塞拉门工序、裙板工序等3道工序使用。减少工人8名:开闭罩工序减掉2名工人,塞拉门减掉4名工人,裙板减掉2名工人。
在使用智能机器人过程中:1)只需1名工人指挥吸盘机器人完成组装工序,工人的劳动强度降低80%;2)机器人取代人力搬抬重物进行组装,工伤事故发生概率趋近于0;3)3道工序原11名工人能省去8名工人,只需3人,节约人力成本73%。
5 智能化生产的预期社会效益
智能机器人的使用推动动车制造业创新与转型,提升整个行业的生产效率,减少人工成本的投入。促进产业从低端加工制造迈向高端加工制造。有助于增强我国动车组制造业的综合竞争力。智能化生产能促进社会经济的发展,而经济发展的核心能力仍然在制造上。科技的进步使得制造的方式产生了巨大的改变,这种改变在很大程度上体现在制造方式上,智能成为了制造方式创新最大的主战场。工业机器人、3D打印、智能终端、智能成套装备成为这种智能化的重要特征[6]。显然,动车组装工艺的创新会对整个动车组制造领域产生深远的影响,而动车组装技术的智能化水平提升无疑会带来不可估量的社会效益。
6 结论
利用吸盘智能机器人实施动车组开闭罩智能化组装技术方案具有可行性,在动车组大设备组装领域具有广阔的应用前景和使用价值。智能化生产必将引发动车组制造领域的工业革命。
