水下探测通信一体化关键技术分析
2018-11-09张群飞史文涛
卢 俊, 张群飞, 史文涛
水下探测通信一体化关键技术分析
卢 俊, 张群飞, 史文涛
(西北工业大学 航海学院, 陕西 西安, 710072)
水下探测与水声通信相结合的水下探测通信一体化技术具有减小平台体积、降低功耗、提高隐蔽性等优点, 但声呐的物理特性、声特性以及水声环境等因素制约了该技术的发展。结合现有雷达通信一体化、水下探测与水声通信技术, 研究了共享体制下基于通信信号的水下探测通信一体化技术, 分析了常用水声通信调制方式的探测与通信性能, 选取了适合水下共享波形的调制方式。针对单基地工作模式, 提出了多级自干扰抑制方法以及利用通信信号特点进行目标方位估计与检测的方法, 设计了发射泄漏模拟抵消器。针对双基地工作模式, 利用空域矩阵滤波方式进行直达波的消除, 分析了信噪比、误码率与探测性能的关系, 同时利用直达波获取的发射信号与回波信号进行匹配滤波, 提高了目标参数估计与检测性能。
水下探测; 水声通信; 一体化; 单基地声呐; 双基地声呐
0 引言
随着科学技术的不断进步, 水下作战方式也向着信息化、系统化发展。水下探测以及水下通信作为水声信息技术一直备受重视, 而将两者相结合的水下探测通信一体化技术也成为水声信息技术中重要的研究方向, 对海洋的利用开发和海洋国防安全有着深远的意义。现有的水下信息系统中, 水下探测和水声通信往往作为独立的设备单独设计和使用, 给体积占用、功率消耗方面带来很大压力, 而两者在工作原理、系统结构、信号处理以及工作频率上的相似, 将两者有机的结合集成, 形成探测通信一体化, 则可减小平台的体积, 降低功耗, 增强隐蔽性[1]。水下探测通信一体化可以实现多种资源的共享, 提高系统生存能力与应变能力, 将成为未来综合电子信息系统发展的趋势。
1 探测通信一体化发展
探测通信一体化技术最早应用于雷达上, 在20世纪60年代, Mealey[2]提出了在雷达上实现通信功能的理念, 利用雷达的脉冲对通信数据进行调制实现单向通信系统。1975年, Fiden等[3]利用不同的脉冲重复频率(pulse recurrence frequency, PRF)表示不同的通信数据来实现雷达系统传输数据的功能。20世纪80年代, 美海军研究实验室在Tilghman岛上利用SENRAD雷达搭建了一系列雷达通信验证系统[4], 验证了利用雷达进行通信的可行性。此后, 探测通信一体化越来越受到各国学者的关注, 而基于声呐的水下探测通信一体化系统目前还处于起步阶段。
1.1 探测通信一体化工作体制
探测通信一体化工作体制分为分时体制、分频体制、分波束体制以及全共享体制4种。
分时体制将时间划分为多个间隙, 在每个间隙中发送探测信号或通信信号, 一个间隙内不能同时发送探测信号和通信信号, 分时体制系统复杂度低, 易实现。1996年, 美国海军研究局开展高级多功能射频系统(advanced multifunction RF system, AMRFS)研究计划[5], 其研究的集成舰载射频系统可以保证雷达、电子战和通信功能同时或分时使用射频资源。

全共享体制是指探测与通信共享一个发射波形, 它具有在同一时段、同一频段进行目标探测与数据通信的能力, 也称为同时同频体制。这4种体制的优缺点如图1所示。
由于雷达可用带宽大、孔径大且电磁波传播速度快的特点, 现有的基于雷达的探测通信一体化系统常采用分时、分频及分波束的工作体制, 这3种体制都易于工程实现。对于声呐而言, 由于可用频带窄、阵列孔径小且水声传播速度慢, 较适合采用全共享体制, 通过发射共享波形, 使探测与通信在同时同频段进行, 因此在宽带利用率、低功耗、小体积方面有着显著优势, 但也给系统实现带来困难, 下文将首先介绍该体制在雷达上的研究现状。
1.2 全共享体制研究现状
全共享体制根据共享波形类型可分为通信与探测波形叠加合成共享波形、基于雷达波形的共享波形以及基于通信波形的共享波形3类。
叠加合成的共享波形采用2种相互正交的波形来分别执行探测和通信功能[7]。2种波形独立产生, 然后叠加合成。2003年, Roberton[8]提出了基于Chirp信号的雷达通信一体化系统, 该系统中通信和雷达波形分别独立产生, 然后叠加合成共享波形, 该系统以Up-Chirp信号作为通信波形, Down-Chirp信号作为雷达探测波形, 在接收端采用独立的接收机, 但这2种信号间的干扰成为影响系统性能的新问题。
基于雷达波形的共享波形将通信信息调制到雷达信号上, 雷达信号成为传输信号的载体[9]。2007年, 荷兰的Barrenechea等[10]提出将通信数据以调幅的方式调制在调频连续波雷达信号上, 形成一个调幅-调频连续波(amplitude modulation- frequency modulated continuous wave, AM-FMCW)宽带雷达。Hassanien等[11]使用跳频的方式将通信信息嵌入到MIMO雷达中。李晓柏等[12]提出了基于线性调频信号的雷达通信一体化系统, 其采用同调频率不同初始频率的Chirp信号, 可在不影响雷达性能的前提下, 实现二进制数据的传送, 此特殊共用信号的设计使得通信信号隐藏在雷达信号之中, 增强了系统的抗干扰能力和信号的低截获率。
基于通信波形的共享波形从已有的通信复用技术上发展而来的, 如码分多址(code division multiple access, CDMA)、正交频分复用(orthogo- nal frequency division multiplexing, OFDM)等, 该类方法主要将通信信号改造成适合雷达探测的波形[13], 或者直接用通信信号作为探测波形。Sturm等[14]研究了OFDM在车载雷达通信综合化中的应用, 其利用OFDM信号的频域特性, 通过傅里叶变换处理雷达测距信号, 不但处理快速、旁瓣低, 且独立于调制数据。刘少华等[15]提出基于最小移频键控(minimum shift keying, MSK)直接序列扩频的雷达通信一体化信号, 通过对通信中的数字基带信号进行扩频, 使其具有良好的自相关性, 从而满足雷达探测的要求。以上3种全共享体制的共享波形优缺点如表1所示。
现阶段探测通信一体化的研究主要是基于雷达, 而基于水下声呐的探测通信一体化研究则很少。
2 水下探测通信一体化技术难点分析
表 1 不同共享信号的优缺点比较
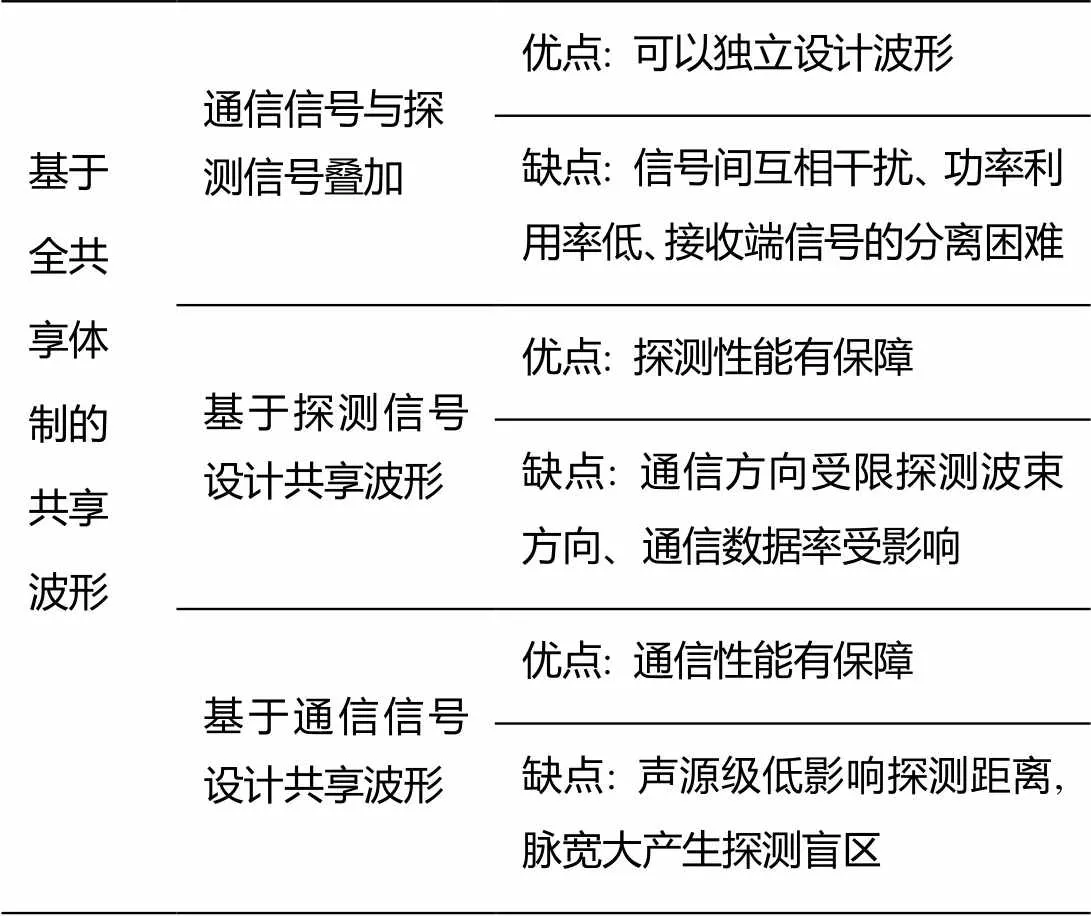
Table.1 Comparison of advantages and disadvantages among different shared signals
在水下信息对抗中, 声呐系统的隐蔽性和低截获率尤为关键。主动声呐发射声源级较强, 在进行目标探测时容易暴露己方, 通信信号发射声源级较弱, 具有较好的隐蔽性。但正是由于通信发射信号弱, 导致目标回波弱。为了提高检测概率, 需要增加信号累积时间以获得累积增益, 这样就需要连续的信号。同时, 在水下无线传感网络(underwater wireless sensor networks, UWSN), 各节点间的协同探测和通信中, 利用分布式的多个节点进行信息融合, 可达到比单一节点更高的检测能力、参数估计精度和容错能力。在通信过程中, 如果同时利用通信信号进行探测, 有利于提高网络的协同效率与隐蔽性。因此, 基于通信信号的水下探测通信一体化系统是值得研究的。以通信信号作为共享信号的探测通信一体化系统主要应用模式如图2所示。
从图2中可知, 水下探测通信一体化应用共有4种工作模式: ①利用自身发射的通信信号的单基地主动探测; ②利用其他节点通信信号的双基地探测; ③利用其他节点主动声呐照射信号(含通信信号)的双基地探测; ④在通信的同时被动目标探测。
借鉴雷达与声呐的相似性及雷达通信一体化的研究成果, 文中根据自研的水声通信与探测系统, 进行水下探测通信一体化的研究。该一体化系统是在保证正常通信性能的前提下, 兼顾目标主动探测功能。通信发射信号既作为信息传递信号, 又作为主动探测照射源, 从而实现探测通信一体化。因此, 文中研究的水下探测通信一体化系统是全共享体制下, 采用通信信号作为共享波形, 重点研究图2中模式①与模式②。系统结构示意图见图3。该系统由发射端、接收基阵及电子仓组成, 发射端为单阵元, 接收端为阵列。下面分别就2种探测模式的研究难点进行分析。
2.1 单基地主动探测模式
单基地主动探测模式利用节点自身发射的通信信号分别完成目标探测与信息传输, 此时通信信号具有信息传递以及目标主动探测2种功能, 其实现过程中存在如下难点。
1) 通信信号波形选取
探测与通信系统在波形上存在差异: 探测系统要求发射信号平均功率大、时宽带宽积大、在接收端可准确复制副本, 以确保匹配滤波带来的处理增益, 进而提高信号的检测能力和参数分辨能力, 常用连续波形、线性调频等波形; 通信系统要求发射信号尽可能多地携带变化的信息, 带宽利用率高, 常用OFDM、相移键控(phase-shift keying, PSK)等波形, 因此, 通信信号波形选取是关系到一体化系统探测与通信性能的重要因素。
2) 发射泄漏抑制
单基地水下探测通信一体化系统采用同时同频工作体制, 受限于平台尺寸, 发射端与接收端隔离度有限, 导致发射泄漏功率远大于目标回波信号功率, 回波信号被干扰信号淹没, 不利于目标的探测, 因此, 如何对发射泄漏的自干扰信号进行抑制是一大关键问题。
3) 基于通信回波信号的目标检测与参数估计方法
通信回波信号功率小、带宽宽、持续时间长等特点, 以及复杂时变的水声环境, 可能使信号发生畸变。通信信号较主动探测信号复杂, 其根据传输的信息、调制方式不同而不同, 以二进制相移键控(binary phase shift keying, BPSK)调制方式为例, 这时调制波形相位跳变快, 从而更容易发生畸变, 畸变更为严重, 不易于目标检测与参数估计, 需研究有效的回波处理方法。
2.2 双基地探测模式
双基地工作模式下, 节点利用其他节点发射的通信信号作为目标探测照射源, 实现目标探测,同时, 通信信号携带通信信息, 从而实现探测与通信一体化的功能, 其实现也存在一定难度。
1) 直达波干扰抑制
接收端首先接收的是其他节点发射信号的直达波, 其强度往往强于目标回波信号, 因此在检测目标时需要对其进行抑制。
2) 目标反射波的不确定性
双基地模式是利用其他节点发射的通信信号作为照射源, 通信信号根据所需发射的信息而变化, 接收端无发射信号副本, 且不同的调制方式以及复杂时变的水声环境可能使信号发生畸变, 不易确定回波的正确波形。
从对水下探测通信一体化的单基地与双基地2种模式实现难点的分析可以知道, 其较陆上雷达通信一体化的实现具有更大的难度, 这些难度源于声呐的物理特性、声特性以及水声环境等, 如何解决这些问题是水下探测通信一体化研究的重点。
3 单基地水下探测通信一体化突破点
借鉴雷达通信一体化的研究, 以及现有水下目标检测与参数估计方法, 针对单基地水声探测通信一体化面临的难点, 给出一些初步方法。单基地水声探测通信一体化系统结构如图4所示。从图中可知, 解决问题的关键在于共享波形的选取、发射泄漏抑制以及回波信号处理三方面。
3.1 共享波形选取
常用的水声无线调制方式有频移键控(frequ- ency-shift keying, FSK)、PSK、MSK, 以及多载波的OFDM等, 特点见表2。
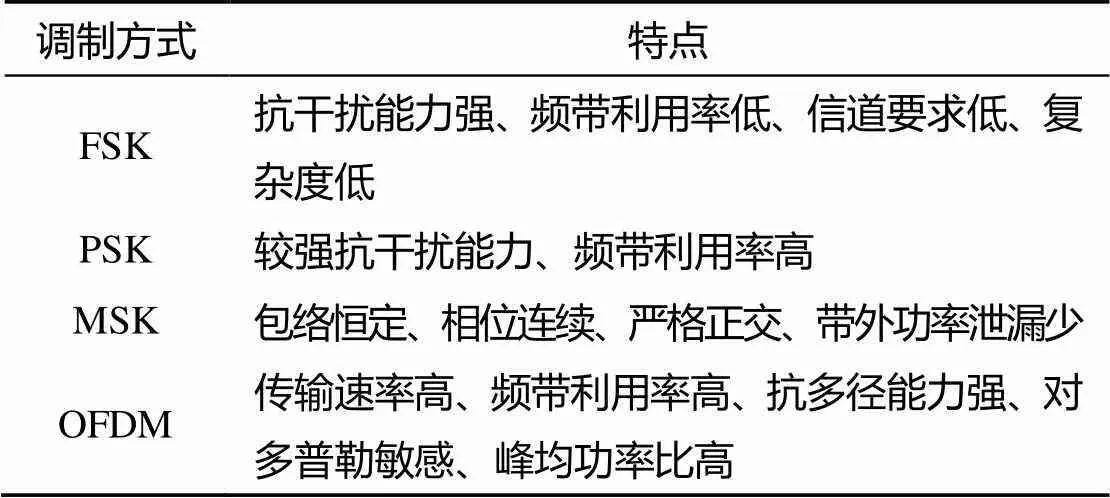
表2 常用无线调制方式特点


(1)
3种调制波形的模糊函数图如图5所示。从图中可知, MSK与2FSK调制信号的模糊函数旁瓣较高, 而BPSK调制信号呈“钉板型”, 都具有良好的时间与频率分辨率, BPSK调制信号还具有较强的抗多普勒混响能力。在无多径理想信道条件、载频6 kHz, 频带3~8 kHz, 采样频率48 kHz, 码元宽度12时, 3种调制方式的误码率仿真图如图6所示。从图中可知, BPSK误码率最低, MSK次之, 2FSK误码率最大。由于码元宽度过小, 导致2FSK失效。综合比较3种调制方式的模糊函数以及通信误码率可知, BPSK较适用于探测通信一体化的共享信号。
3.2 多级自干扰抑制
探测通信一体化系统中发射泄漏的强度远远大于目标回波, 需要在接收端对发射泄漏进行抑制。可根据发射泄漏特点进行多级抑制: 首先利用接收端声学结构对收发换能器进行声学隔离; 再利用多个接收水听器的对称性, 通过两两相减对自干扰进行初步抑制; 然后测出发射信号到接收端的传递函数, 在模拟电路中减去发射泄漏的估计值, 实现自干扰的抑制; 经过前2级的干扰抑制后, 模拟信号量化成数字信号, 完成进一步的自干扰数字化抑制。探测通信一体化系统多级自干扰抑制示意图如图7所示。
1) 声学隔离
首先把发射换能器和接收水听器布置在水密仪表舱的两端, 然后在两者之间加声障板, 达到隔离收发之间声传播通道的效果。
2) 声学抑制
利用阵元布置结构, 进行自干扰抵消。如文献[16]中所提的半波长抵消法, 两接收阵元与发射阵元在同一直线上, 且两接收阵元相对于发射端距离差半个波长, 因此两阵元接收信号的具有“等幅同相”特性, 利用这一特性进行对消, 达到15~30 dB的对消性能。这种双阵元相减的方法相当于压差式矢量水听器, 它会把法线方向的信号也减掉, 所以为了确保各方向信号的正常接收, 至少需要2对连线正交的水听器。
由于阵元布置精度以及结构影响, 阵元间难以达到“等幅同相”的情况, 这会影响对消的性能, 仿真结果如图8所示。
从图8可知, 幅度与相位误差越小, 对消比越大, 因此阵元间的幅相一致性较为重要。
3) 模拟域发射泄漏抑制
模拟域发射泄漏抑制主要利用延迟器、衰减器和移相器等重建干扰信号, 再用重建的干扰信号与接收信号相减达到干扰抑制目的。常见的方法为多抽头延迟滤波[16], 其结构图如图9所示。
多抽头延迟滤波模型是当前同频同时全双工(co-frequency co-time full duplex, CCFD)系统中模拟域自干扰消除的原型。自干扰消除效果与模拟电路重建的自干扰信号的幅度、相位以及时间延迟偏差有关。以时间延迟偏差为例说明, 采用BPSK调制信号, 发射声源级180 dB, 仿真得到延迟时间、信号带宽与残余自干扰功率关系如图10所示。
从仿真结果看, 残余自干扰功率随着延迟时间的增加而增加, 当延迟时间增加到一定程度时, 残余自干扰功率达到恒定值; 当延迟时间一定时, 随着信号带宽的增加, 残余自干扰功率增加。所以为了增加自干扰消除能力, 应尽量减小信号带宽与延迟时间偏差。
依据电话机的回声抵消原理, 根据文中研究的一体化系统, 设计适合该研究的发射泄漏抵消滤波器(如图11所示), 它是一种自适应干扰抵消器, 根据抵消输出调整滤波器系数, 使输出最小, 最大程度抵消接收信号中的发射泄漏。滤波器系数在数字域调整, 抵消过程在模拟信号域进行, 充分保证了微弱目标回波的信噪比。
4) 数字域发射泄漏抑制
经过前面两级自干扰抵消后, 模拟信号经过A/D量化成数字信号, 在数字域进一步进行干扰抵消处理。常用的方法有基于干扰信道估计与重建的自干扰抑制及自适应滤波。基于干扰估计与重建的数字干扰抑制, 其抑制效果主要取决于干扰信道的估计精度。自适应滤波需要一个接收信号输入和一个参考输入, 以便抵消原始输入中的干扰信号, 而对其中的有用信号则不产生影响。
自适应滤波器如图12所示, 其核心是自适应对消器, 自适应对消器的特性是当输入过程的统计特性未知或输入过程的统计特性变化时, 能自适应调整自身的参数, 以满足某种准则要求, 常见的准则有递归最小二乘(recursive least squa- res, RLS)准则、最小均方(least mean square, LMS)准则、归一化最小均方(normalized least mean squ- are, NLMS)准则。
经过多级自干扰抑制, 使发射泄漏自干扰被抑制在可以接受的范围内, 从而保证系统对远程弱目标的探测性能。
3.3 回波信号处理
水下探测通信一体化对于目标回波信号的处理, 可以借鉴常规的主动声呐信号处理方法。通信发射声源级(180~185 dB)要小于主动声呐发射声源级(200~205 dB), 因此, 目标回波信号能量更弱。
为提高微弱信号的检测能力和估计精度, 可对回波信号进行匹配滤波、增加时宽带宽积处理增益, 但同时也增加了运算复杂度和内存资源开销。因此, 需要对接收到的回波分段, 再对各段进行信号处理, 最后对处理结果进行融合, 达到降低运算复杂度, 提高探测性能的目的, 其过程如图13所示。
信号分段的长度不仅影响时间累积增益大小, 同时关系到运算复杂度, 因此合适的信号分段长度对平衡运算复杂度与系统性能尤为关键。
回波信号为目标对通信信号的反射波, 利用通信信号的特点进行目标的方位估计与检测是一种方法。如BPSK调制信号, 其具有非圆特性[17], 依据这一特性, 同时利用接收数据矩阵及其共轭, 组成扩展的接收数据矩阵
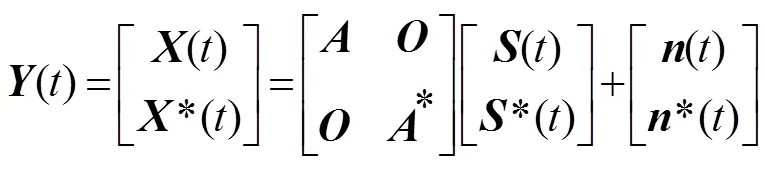
利用扩展的接收数据矩阵可以提高信息的利用率, 等效于虚拟扩展阵列的阵元数, 从而提高波达方向(direction of arrival, DOA)估计的分辨率,并增加可估计的信源个数。
基于通信信号的水下探测通信一体化回波信号具有功率小、带宽宽、持续时间长以及可能存在畸变等特点, 给信号处理带来难度, 需要进一步研究有效的处理方法。
4 双基地水下探测通信一体化突破点
双基地水下探测通信一体化是利用其他节点发射的通信信号作为照射声源来探测目标。首先通过接收、解调该通信信号的直达波, 获得发射节点的信息, 然后滤除该直达波去检测微弱的目标回波。它面临的问题主要是直达波抑制以及不确定性信号检测。
4.1 直达波抑制
双基地水下探测通信一体化工作过程中通信信号直达波的强度会远高于目标对通信信号的回波。假设双基地距离为, 目标位于中点/2处、目标强度10 dB, 两者的吸收衰减差别不大, 但扩展损失相差很大(见表3)。距离1 km的2个节点要实现双基地探测, 接收系统需要具有38 dB的直达波抑制能力, 才能获得0 dB的信干比。这对直达波抑制能力提出了较高的要求。
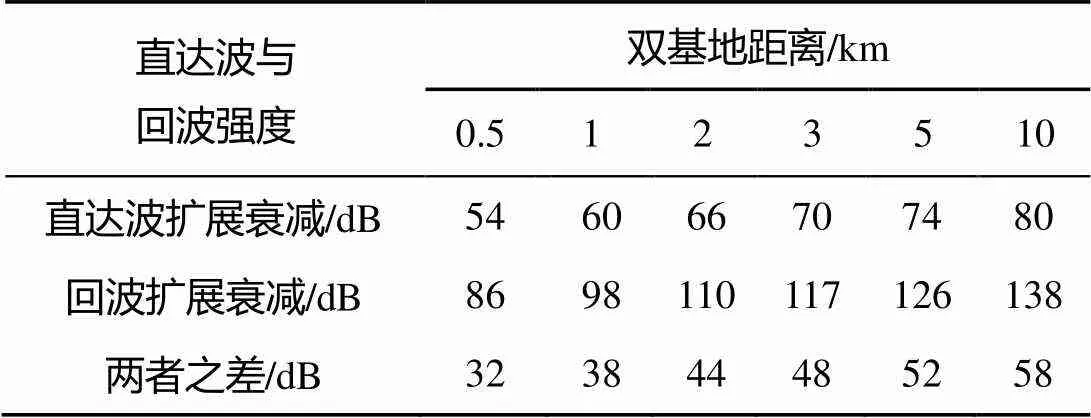
表3 双基地不同距离下直达波与回波强度分析

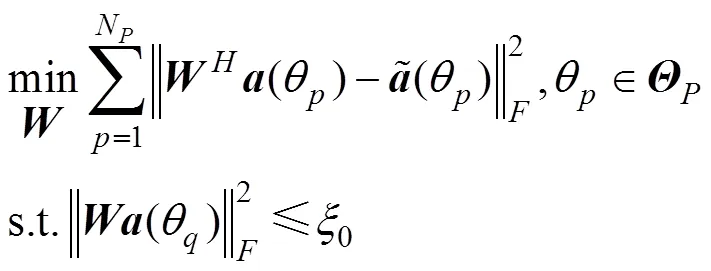
式中:是设定的阻带扇面的衰减率;为目标方位。
从仿真结果可以看出, 当不进行空域滤波, 干噪比为10 dB时, 目标信号被干扰淹没; 经过最小二乘矩阵滤波后, 在干噪比10 dB时依然能较好地分辨出目标。基于零点约束的空域滤波结果, 在信干比25 dB时依然能检测到目标, 比最小二乘空域滤波具有更好的干扰抑制效果。
4.2 不确定性信号检测
双基地模式中, 通信信号由于发送信息的不同, 其发射信号波形中除了同步头、训练段是确定的, 其余大部分是不确定的数据段。同时, 信道环境引起信号的畸变导致目标反射回波的不确定性, 给回波信号的处理带来难度。

从仿真结果上看, 目标回波与副本做匹配滤波后, 随着信噪比的提高, 信号通信误码率降低, 目标分辨概率随之提高。
因此, 如何获取准确波形, 降低误码率对探测性能的影响值得研究。将通信帧中携带信息的不确定部分进行分块校验, 校验正确则加入到检测副本中, 否则相应位置的检测副本置零, 排除解调错误的波形给检测带来的负面影响。分块校验的关键是分块长度的确定, 分块太长会导致可用的块太少, 分块太短则需要引入太多的校验信息、降低了通信有效数据率, 且不同误码率情况下的最佳分块长度也不同。以正交相移键控调制(quadrature phase shift keying, QPSK), 编码数据帧长1 000 bit为例, 考虑每块加入4 bit校验和, 表4为不同误码率和分块长度时的可用分块比例。
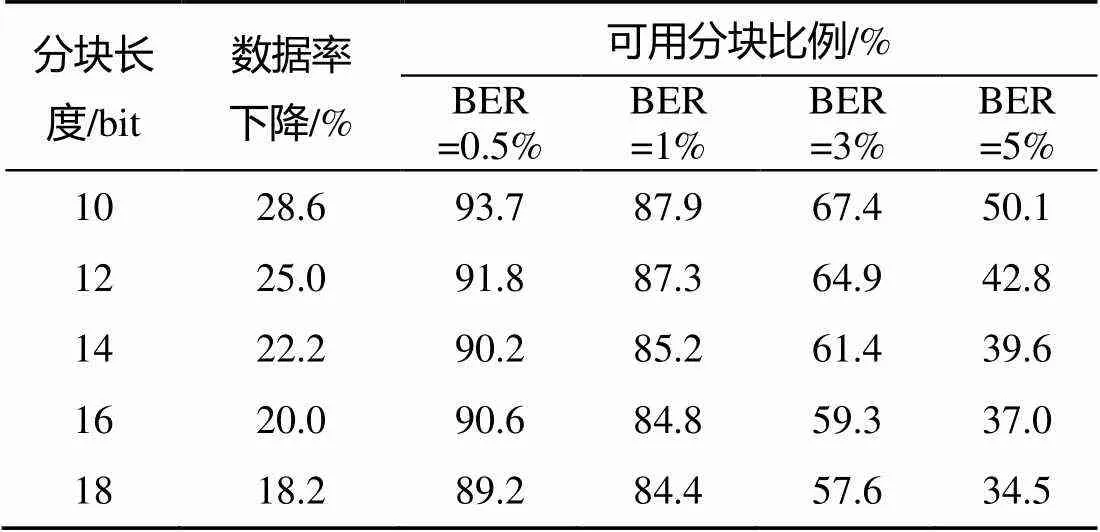
表4 不同误码率和分块长度时的可用分块比例
利用解调以及校验等方式, 根据回波信号准确重建发射端发射信号, 是解决目标回波不确定性的一种有效方式。
5 结束语
水下探测通信一体化系统同时具备水声通信与水下目标主动探测功能, 是水下技术向集成化发展的一个趋势。文中参考雷达通信一体化技术, 根据水下探测和通信的特点, 提出了全共享体制下基于通信信号的水下探测通信一体化技术。分析传统水声通信调制方式的探测与通信性能, 为共享信号选取合适的通信调制方式。针对单基地工作模式, 提出多级自干扰抑制方法对发射泄漏信号进行抑制、以及利用通信信号的特点进行目标的方位估计与检测方法。针对双基地工作模式, 利用空域矩阵滤波进行直达波的消除, 同时利用直达波获取的发射信号与回波信号进行匹配滤波, 提高目标参数估计与检测性能。文中是对水下探测通信一体化技术初步探讨, 后续还需有更深入的研究。
[1] 李廷军, 任建存, 赵元立, 等. 雷达—通信一体化研究[J]. 现代雷达, 2001, 23(2): 1-2.Li Ting-jun, Ren Jian-cun, Zhao Yuan-li, et al. Research of Radar-Communication Integration[J]. Modern Radar, 2001, 23(2): 1-2.
[2] Mealey R M. A Method for Calculating Error Probabilities in a Radar Communication System[J]. IEEE Transactions on Space Electronics & Telemetry, 1963, 9(2): 37-42.
[3] Fiden W H, Czubiak D W. Radar-compatible Data Link System: US 7298313 B1[P]. 2007.
[4] Coleman J O. Architecture for a Demonstration Radar co- mmunication Link[R]. Naval Research Lab Report, 1984.
[5] Hughes P K, Choe J Y. Overview of Advanced Multifunction RF System(AMRFS)[C]//IEEE International Conference on Phased Array Systems and Technology, 2000. Dana Point, CA, USA: IEEE, 2000: 21-24.
[6] Antonik P, Bonneau R, Brown R, et al. Bistatic Radar Denial/Embedded Communications Via Waveform Diversity[C]// Radar Conference, 2001. Proceedings of the Atlanta, GA, USA: IEEE, 2001: 41-45.
[7] Cantrell B H, Coleman J O, Trunk G V. Radar Communications[R]. Naval Research Lab Report, 1981: 1-15.
[8] Roberton M, Brown E R. Integrated Radar and Communications Based on Chirped Spread-spectrum Techniques[C]// IEEE MTT-S International Microwave Symposium Digest, Philadelphia, PA, USA: IEEE, 2003: 611-614.
[9] Lu L I, LI G J, Li C Q. A Communication System Based on Active Phased-array Radar[J]. Journal of China Acade- my of Electronics & Information Technology, 2008, 2: 131-135.
[10] Barrenechea P, Elferink F, Janssen J. FMCW Radar with Bro- adband Communication Capability[C]//Radar Conference, 2007. Boston, MA, USA: IEEE, 2007: 130-133.
[11] Hassanien A, Himed B, Rigling B D. A Dual-function MIMO Radar-communications System Using Frequency-hopping Waveforms[C]//Radar Conference. Seattle, WA, USA: IEEE,2017: 1721-1725.
[12] 李晓柏, 杨瑞娟, 程伟. 基于Chirp信号的雷达通信一体化研究[J]. 雷达科学与技术, 2012, 10(2): 180-186.Li Xiao-bai, Yang Rui-juan, Cheng Wei. Integrated Radar and Communication Based on Chirp[J]. Radar Science and Technology, 2012, 10(2): 180-186.
[13] Liu Y, Liao G, Xu J, et al. Adaptive OFDM Integrated Radar and Communications Waveform Design Based on Information Theory[J]. IEEE Communications Letters, 2017, 21(10): 2174-2177.
[14] Sturm C, Wiesbeck W. Waveform Design and Signal Processing Aspects for Fusion of Wireless Communications and Radar Sensing[J]. Proceedings of the IEEE, 2011, 99(7): 1236-1259.
[15] 刘少华, 黄志星. 基于扩频的雷达通信一体化信号的设计[J]. 雷达科学与技术, 2014(1): 69-75.Liu Shao-hua, Huang Zhi-xing. Design of Intergrate Radar-Communication Signal Based on Spread Spectrum[J]. Radar Science and Technology, 2014(1): 69-75.
[16] Mueller K. A New Digital Echo Canceler for Two-Wire Full-Duplex Data Transmission[J]. Communications IEEE Transactions on, 1976, 24(9): 956-962.
[17] Chen H, Hou C, Liu W, et al. Efficient Two-Dimensional Direction-of-Arrival Estimation for a Mixture of Circular and Noncircular Sources[J]. IEEE Sensors Journal, 2016, 16(8): 2527-2536.
Analysis on the Key Technology of Integrated Underwater Detection and Communication
LU Jun, ZHANG Qun-fei, SHI Wen-tao
(Northwestern Polytechnical University, College of Marine Engineering, Xi’an 710072, China)
The integrated technology combined with underwater acoustic communication and underwater detection possesses the advantages of reducing platform volume and power consumption, and enhancing concealment. However, the development of this technology is restricted by the physical characteristics, acoustic characteristics and underwater acoustic environment of a sonar. In this paper, an integrated detection and communication technology based on communication signals under the sharing system is researched by means of the existing radar communication integration technology, underwater acoustic communication and detection technology. The detection and communication performances of the commonly used underwater acoustic communication modulation mode are analyzed, and the modulation modes suitable for underwater shared waveforms are selected. Aiming at the single base operation mode, a multi-level self-interference cancellation method and a method for estimating and detecting target based on the characteristics of communication signal are proposed, and a emiting leakage analog canceller is designed. Aiming at the bistatic operation mode, a spatial matrix filter is used to eliminate the direct waves, the relationship among signal-to-noise ratio(SNR), bit error rate(BER) and detection performance are analyzed, and the transmitted signal and echo wave which are obtained by direct wave are matched for filtering, so the performance of target parameter estimation and detection is improved..
underwater detection; underwater acoustic communication; integration; single base sonar; bistatic sonar
TJ630.34;TN911.7
A
2096-3920(2018)05-0470-10
10.11993/j.issn.2096-3920.2018.05.015
2018-7-30;
2018-9-12.
国家重点研发计划(2016YFC1400203), 国家自然科学基金(61531015).
卢 俊(1989-), 男, 在读博士,主要研究方向为水下信号处理技术.
卢俊, 张群飞, 史文涛. 水下探测通信一体化关键技术分析[J]. 水下无人系统学报, 2018, 26(5): 470-479.
(责任编辑: 杨力军)