Intelligence evolution for service robot:An ADRC perspective
2018-11-02GuofeiXIANGYaoHUANGJingruiYUMingdeZHUJianboSU
Guofei XIANG,Yao HUANG,Jingrui YU,Mingde ZHU,Jianbo SU
Department of Automation,Shanghai Jiao Tong University,Shanghai 200240,China Received 3 April 2018;revised 29 June 2018;accepted 23 July 2018
Abstract
The strategy of active disturbance rejection control(ADRC)and its applications in intelligence evolution for service robot are summarized.It is also shown that the philosophy of ADRC is consistent with the essential characteristics of intelligence evolution.Most importantly,we concentrate on five core issues which will be encountered when applying ADRC to deal with intelligence evolution for service robot,that is,how to eliminate the impact of unknown composite disturbances,how to handle the nonholonomic constraints in uncalibrated visual servoing,how to realize eye-hand-torque coordination,how to deal with the disturbance in simultaneous localization and mapping(SLAM),and how to reject the imperfections induced by network in human-robot interaction.The main purpose of this paper is to clarify the challenges encountered on intelligence evolution for service robot when one applies ADRC to,hoping that more and more researchers can give some suggestions or work together to deal with these problems,and flourishing results of ADRC from both theory and applications.
Keywords:Service robot,motion control,visual servoing,nonholonomic constraints,eye-hand-torque coordination,simultaneous localization and mapping(SLAM),human-robot interaction(HMI),active disturbance rejection control(ADRC)
1 Introduction
Service robot is born at the right moment,when humans want to enhance the sense of happiness by allowing robot to help and collaborate with us in life and work more and more[1–3].Service robot is a typical nonlinear complex system and needs multidisciplinary knowledge.It usually works in unstructured and uncertain environments,such as homes,shopping malls,and hospitals,etc.We also require thatit can interact with us naturally and realize the given task autonomously.Endowing service robot with intelligence maybe a promising approach to deal with this problem.On the other hand,how to imitate human intelligence and behavior is also a long standing dream for us,which may most probably lead to intelligence evolution for service robot.In this paper,we mainly focus on five key issues on intelligence evolution based on the essential behaviors of the typical service robot,namely motion control,visual servoing,eye-hand-torque coordination,localization and mapping,and intention identification of human controller.
High performance motion control is just the basic premise for service robot task realization.Motion control has evolved into advanced control methods,which concern nonlinearity,robustness and intelligence more,from the simple linear feedback control.Many typical control schemes have been developed,including proportional-integral-derivative(PID)[4],robust control[5],adaptive control[6],stochastic control[7],sliding mode control[8]as well as intelligent methods,such as fuzzy control[9],neural network based control[10],etc.The aforementioned methods,without any doubts,can solve the motion control problem to a certain extent,but many problems are still open.For example,it is difficult to analyze the stability of PID based control system.Robust control owns innate strong conservatism.The general premise for stochastic control,that all disturbances are Gaussian,cannot be fulfilled in practical systems.The chattering phenomenon existing in sliding mode control limits its application largely.Intelligent control methods usually lead to huge computational burden and slow convergence process.On the other hand,service robots,with different shapes and functions,usually work in unstructured,uncertain environment,and the robot itself suffers from strong couplings,parameter perturbations,and unmodelled dynamics,etc.,but almost all of the above methods are relying on accurate system models in some ways.Therefore,the aforementioned methods cannot fulfill the performance requirements for service robot in most updated complex situations.However,Gao[11]clarified that the essence of automatic control is just disturbance rejection,including both internal and external disturbances.The huge challenge of high performance motion control for service robot is to satisfy the accordingly performance requirement under inaccurate system model or even without any knowledge about the system model.
As is known to all,“watching by eye and manipulating through hand”is a typical feedback control scheme in human intelligence,which constitutes the main research topic in visual servoing[12].A typical visual servoing system is shown in Fig.1,there are mainly three components involved,that is camera calibration,image feature extraction and system modeling.However,these procedures are inevitably subjected to issues,such as low calibration precision,unrobust features and unmodelled dynamics,etc.Typically,the visual servoing precision is lower than that of system model and sensor model[13].The core of calibration-free robotic visual servoing is to control the robot to realize the given task,using robot states and task status detected by camera systems,with partially known or totally unknown camera model and the mapping relationship between the camera and the manipulator.A great number of researchers use image Jacobian matrix to deal with this problem,that is estimating the nonlinear mapping between camera and manipulator online using a time-varying linear image Jacobian matrix at current moment,then computing the control signal for the next moment[14,15].However,researches show that,image Jacobian matrix based methods largely rely on the system configuration and task to be conducted.It is also subjected to delayed estimation,singularity,non-convergence and very long time for convergence.In addition,artificial neural network[16,17]has been used to fit the time-varying image Jacobian matrix,it is still hard to implement in real systems for the intolerantly long training time and data hungry,and no convergence guaranteed.Hence,the existing large amounts of uncertainties from such as the unknown camera parameters,uncertain mapping between the visual system and robot manipulator and the disturbances,etc.,largely deteriorate the performance of a robotic visual servoing system.More seriously,many robots may be subjected to nonholonomic constraints,such as,mobile robot,space robot,etc.The nonholonomic constraints will cause non-square image Jacobian matrix,which may lead to great difficulty to obtain its inverse in servoing controller design.Furthermore,the widely existing uncertainties may degenerate visual servoing performance severely.Thus,it is imperative to develop effective methods for uncalibrated visual servoing with nonholonomic constraints considered.

Fig.1 A typical eye-hand coordination control system.
On the other hand,for service robot,torque is a basic requirement that should be fulfilled during eye-hand coordination[12].For example,when robot conducting polishing,wiping and grabbing or carrying something fragile,etc.,the force during contacting should be controlled to a predefined intensity.Conventional methods only take torque as a constraint,which should be satisfied during task execution.Considering the strong couplings in robotic torque space,motion space and visual space,one cannot specify the accurate mappings among these spaces.Thus,eye-hand-torque coordination is of great necessity and is also a big challenge in intelligence evolution for service robot.
Service robot must have the capability of understanding “where am I?”and “where am I going?”,because of the unstructured and uncertain time-varying environment.Simultaneous localization and mapping(SLAM)is the method to estimate the pose transition of robot,under unknown environment and without any prior knowledge.During the SLAM process,many kinds of uncertainties would be introduced,such as,environment uncertainty,uncalibrated sensors and unmodeled dynamics,etc.Without any doubts,the existing uncertainties will deteriorate the final localization and mapping performance largely.References[18,19]mainly concern on improving the robustness of the extracted features.A.Kendall et al.[20]tries to quantify the environment uncertainties by presenting a deep learning framework for probabilistic pixel-wise semantic segmentation,namely Bayesian SegNet.For visual SLAM,the problem of camera calibration is even more severe,especially for cameras with large distortion[21].Many researchers try to calibrate the SLAM system by introducing other kinds of sensors,such as,infrared distance measurement equipment,laser and inertial measurement unit(IMU),etc.,or using advanced calibration techniques,such as receptive fields[22,23].Furthermore,many probabilistic approaches have been applied to deal with the uncertainties.For example,J.L.Blanco et al.[24]applies Rao-Blackwellized particle filters(RBPFs)to mobile robot simultaneous localization and mapping and exploration,in which they take the uncertainty in both the robot path and the map into account.Therefore,how to deal with various uncertainties in a SLAM system is of great importance.
Service robot should have to interact with users while accomplishing the task.With the developing of communication network,especially with the coming age of 5G era,human-robot interaction(HMI)can further be improved in its flexibility and reliability[25,26],with various communication networks such as controller area network(CAN),BACnet,Fieldbus,wired or wireless Ethernet,or even the Internet.However,the introducing of network will induce imperfections from different hierarchies,such as time delays,time-varying transmission/sampling intervals,packet losses and disorder,competition of multiple nodes accessing network,data quantization,clock asynchronization among local and remote network and network security and safety,etc.,[27].The existing of network induced imperfections will deteriorate the performance of HMI,or even endanger its stability.Therefore,network based HMI may cause many unexpected bad behaviors during the task realization.During the past decades,extensive studies on network-induced imperfections have been carried out by both the control and the communication communities assuming different scenarios,and various methodologies have been proposed on how to cope with the imperfections.While essentially eliminating the net work induced imperfections cannot be separated from the improvements of the communication infrastructure itself,developing appropriate control theories and approaches during HMI to overcome these imperfections is of great necessity and significance[28–30].
Various uncertainties in service robot,including unmodelled dynamics,uncertain environment and unknown disturbances during task executing,is of great influence for task realization.Active disturbance rejection control(ADRC)[31]is just the control scheme that proposed to deal with uncertain control system since its initialization.It has some advantages for disturbance rejection in uncertain control systems,and has been attracting a large number of researchers,from both academia and industry.ADRC control the uncertain system by estimating the internal unmodelled dynamics and external disturbances,as lumped total disturbance,then an extended state observer(ESO)is constructed to compensate for the total disturbances in real-time.Therefore,for high performance motion control,we can directly reduct the problem into the ADRC framework and actively eliminate the effect caused by uncertainties.For service robot uncalibrated visual servoing and eyehand-torque coordination,if we regard the unknown mappings among visual space,motion space and torque space as unknown dynamics,then ADRC can be use to design a satisfied eye-hand-torque coordinator[32,33].The essence of ADRC is that an extended state observer is constructed to estimate the effects of all uncertainties that deteriorate the performance then compensate for,and make the control system look like free of disturbance.Thus,if we regard the uncertainties and imperfections caused by the unknown environment and data transmissions,in SLAM and HMI,as total disturbances,we definitely can utilize the idea of ADRC to design control scheme to handle them accordingly.In fact,some pioneer works have shown the effectiveness in dealing with some of above problems.Therefore,we will study on intelligence evolution for service robot from an ADRC perspective in this paper,and mainly focus on five key issues,namely motion control,uncalibrated visual servoing with nonholonomic constraints,eye-hand-torquecoordination,simultaneous localization and mapping and network based human-robot interaction.While presenting some success cases,more importantly,we want to show the challenges encountered when applying ADRC to tackle these problems.
2 ADRC in motion control
Until now,ADRC has been successfully applied to many motion control problems,such as robot manipulator[34],flight control[35],motor control[36],etc.As the most important part of ADRC,the observation performance of ESO will largely affect the control performance.By introducing bounded assumption on the system uncertainty,Lyapunov stability analysis of both linear and nonlinear ESO is proposed in[37].However,the above analysis is only proposed for traditional ESO design.Except for convergence analysis,the disturbance rejection performance is rarely investigated,especially for time-varying disturbances.Madonski et al.[38]claimed that typical ESO offers asymptotic convergence of estimation for constant disturbance,timevarying disturbance cannot be estimated by traditional ESO thoroughly.Thus,it is important to explore the observer design methodology against time-varying disturbance for better disturbance rejection performance.
In[39],the generalized ESO with high order is investigated,showing that it improves in the tracking of fast time-varying sinusoidal disturbances.It can be seen that the high order ESO can improve the estimation accuracy of sinusoidal external disturbances more or less.However,there still exists a periodic estimation error,which will decrease the control performance.According to internal model principle,the observer cannot reject the disturbance exactly unless the disturbance dynamics is embedded into the observer.Next,we present an generalized ESO with the help of internal model principle to cope with composite disturbances.More importantly,we will clarify the challenges for composite disturbance rejection in motion control.
By taking the disturbance dynamics into account,a generalized ESO is proposed to estimate the equivalent disturbance and system state.Thus,the outer loop state feedback controller is designed for desired tracking performance.Consider annth order SISO nonlinear system,


whereD(·) ∈R is the equivalent disturbance caused by both unmodelled dynamics and external disturbance.Assume that the equivalent disturbance in equation(2)satisfies

where θ∈Rmrepresents the state of the disturbance system and μ∈R is the input.pandqare two smooth vector fields with corresponding dimensions.gis a smooth map.The input μis a function of external disturbancedand system statex,and the relative order of the disturbance system satisfiesr≤n−1.
With the help of Lie-algebra,by introducing the following differential homeomorphism transformation ξ=ψ(θ),we obtain

Then the disturbance system can be transformed into
where

Consider both the system model in equation(2)and disturbance model in equation(5),define the generalized states of the system as˙x=[xT,ξT]T,the reconstructed generalized system model can be obtained as

By simple mathematical manipulation,the reconstructed system is observable if and only if the original system equation(1)is observable.For more discussions on this topic,please refer to[41,42].Then,one can design a ESO based on the reconstructed system equation(6).Comparing the reconstructed methodology with the traditional one,the reconstructed one can take the equivalent disturbance model into account,thus one can take full advantage of prior information of the system.By appropriate assumptions,and with the help of Lyapunov stability results,the stability of the generalized ESO is guaranteed and the error of both the control system and observer is bounded.
The generalized ESO based composite disturbance rejection control scheme has been shown in Fig.2.Zhang et al.[40]takes advantage of this approach to deal with the attitude tracking control of an aircraft,which subjected to sinusoidal disturbance.The results show that the generalized ESO based approach can successfully eliminate the periodic tracking error for the time-varying desired attitude,while the traditional one cannot.However,in practice,we cannot model the composite disturbances in advance,i.e.,the differential homeomorphism transformation in equation(4)is no longer satisfied,and we cannot obtain the reconstructed generalized system as equation(6).The internal model principle also cannot be applied.Under this circumstance,how to design satisfied ESO to eliminate composite disturbance is a big challenge in practice.
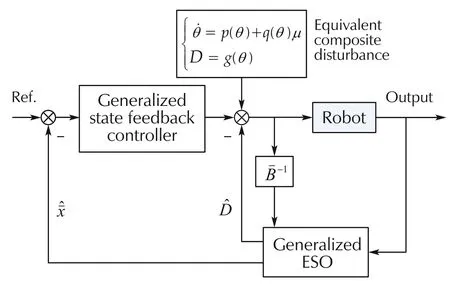
Fig.2 Generalized ESO based motion control system.
3 ADRC in uncalibrated visual servoing with nonholonomic constraints
Vision-based navigation for mobile robot has received a significant amount of attention in the service robots field[43].The external visual sensor is widely used in the robot system for its advantage of non-contacting,informativeness and inexpensiveness.Meanwhile,it can help the wheeled mobilerobot to avoid the dead reckoning problem.Wheeled mobile robot is a kind of typical nonholonomic system which has been widely recognized with the velocity or acceleration constraints that are non-integrable[44].Without loss of generality,we use a set of generalized coordinatesq={x,y,θ}to describe the mobile robot configurations,wherex,ydenote the position of the center of the rear axis and θ denotes the heading angle measured from thex-axis.The kinematic constraint is expressed by analytical relations between the generalized coordinates and their time derivatives,which arises from the assumption that the wheels do not slide.

whereA(q)=[sinθ,−cosθ,0]T.Then the basis for the right null space of the constraint matrixA(q)can be used to develop the following drift-free nonlinear control sys-tems,which are the kinematics of the mobile robot.

wherev,wdenote the translational velocity and angular velocity of the mobile robot,respectively.
Due to the nonholonomic constraints,both the linear control theory and standard nonlinear control methods are failed in the driftless control system.According to the Brockett’s necessary condition[47],nonholonomic systems cannot be stabilized via a smooth static-state feedback law.In[46],the problem has been addressed from two points of view.One is motion planning which is considered as an open loop control problem.By finding a group of bounded control sequence to steer the system from an initial state to a final one over a given finite time interval.Since there does not exist a set of independent generalized coordinates to describe the nonholonomic system,not every motion is feasible in the coordinate space.Motion planning for the nonholonomic system should be performed with constraint.Another close-loop strategy is that an equilibrium of the closed-loop system is exponentially stable or asymptotically stable by a feedback control law.The linearization of nonholonomic systems about any equilibrium is uncontrollable.Consequently,linear stabilization methods cannot be used even locally.The approaches for stabilization of the nonholonomic system can be classified as discontinuous time-invariant stabilization[45],smooth time-varying stabilization[48],and hybrid stabilization[49].
In addition to the system control problem caused by the nonholonomic constraints,the system uncertainties arising from uncalibrated camera parameters(including internal and external parameters),unknown image depth,robot modelling errors and environmental disturbance should also be considered.The former two are introduced by vision sensors.The dynamics of the vision-based mobile robot system can be expressed as
whereS∈Rndenotes a set of image features,U=(v,w)Tis the velocity vector of the mobile robot system,J(q) ∈Rn×2is the Jacobian matrix which contains the whole system uncertainties.equation(9)describes the differential change of features in the image caused by the differential movements of the mobile robot in the robotic coordinate system.
做好购置程序的严格控制,针对耗资巨大的机械设备需要建立专门的审批制度对其进行控制。以保证机械在运转过程中产生故障时能够及时和生产商协商解决。此外,还要将日常检修工作和维护工作放在工作的首位,通过信息化技术的应用建立计算机检测机制,对机械设备进行实时监控,保证机械设备的运转正常。
In general,the image features are redundant.Without loss of generality,considering point features as an example.At least two points which are neither coplanar with the optical axis nor perpendicular to the motion plane should be chosen.That means the number of inputs is less than system states which makes the Jacobian matrix non-square.The inverse of the singular matrix cannot be applied directly which prevents application of the traditional model based control strategies.There are two points of view to deal with the problem.1)Reconstructing image feature to reduce the dimension of the system state.An existing example has been indicated by[50].2)Adding control dimension by changing the vision model such as a pan-tilt camera.Furthermore,in the perspective of ADRC,the essential problem is to analyze the observability of the uncertainties in the nonsquare Jacobian matrix which is still an open problem.
4 ADRC in eye-hand-torque coordination
In fact,eye-hand coordination with torque constraints have been widely studied in the last decades.Raibert[51]proposed torque-position hybrid control scheme,due to the orthogonality between the torque space and motion space in some tasks.Hogan[52]proposed impedance control,which adjusted the position and speed based on the error of torque.Chung[53]designed adaptive control mechanism by learning the force of friction,gravity and acting force in real-time.In all above cases,the torque space and the motion control space are not strongly coupled.While in some cases,like acupuncture therapy in Chinese medical diagnoses[54]as shown in Fig.3,which is totally different from the above,where the torque space and the motion control space are strongly coupled,i.e.,the coupling between torque and eye and the coupling between torque and hand should also be considered.Just as in the“Manipulating the needle”stage,the eye-torque coordination should be carefully conducted with the help of eye-hand coordination.And in the“Retaining and withdrawing the needle”stage,the hand-torque coordination should be carefully conducted with the help of eye-torque coordination.This also comes when using robot writing Chinese Calligraphy[55].

Fig.3 A typical procedure of acupuncture therapy.
In a robot eye-hand-torque coordination system,with the introduction of torque requirements in conventional eye-hand coordination system,the three pairs of mappings,i.e.,eye-hand coordination,eye-torque coordination and hand-torque coordination,generally,cannot be specified accurately in advance.Taking acupuncture therapy as an example,it is hard to locate the acupoints since it is difficult to model the mechanical characteristics for tissues,and there is huge difference between different individuals compared with the size of the acupuncture needle.Then,the needle is not rigid body,some extent of buckling exist during the acupuncture procedure.In addition,the uncertainties in sensors and unmodeled dynamics for robot will also degenerate the performance largely.Therefore,it is really a challenge for the eye-hand-torque coordination system with performance guaranteed.
In practice,if we regard the three unknown mappings and uncertainties as unknown dynamics,then the philosophy of ADRC is shown to be consistent with the characteristics of robotic eye-hand-torque coordination.Supposing the unknown eye-hand-torque relationshipf(·)can be represented as

whereW=(wx,wy,wz)Tis the hand position in the robotic coordinate system.P=(px,py,T)Tis the hand position in image space with torqueT.The target position and torque isDifferentiation of the both sides of equation(10)leads to

whereUis the velocity vector in the robotic coordinate system,which is the system control.g(W)is the Jacobian matrix off(W).In practice,g(W)can only be estimated.Thus,taking the estimation error and external disturbance into account,we obtain

whereg(W)is the estimation ofg(W),and we can just simply choose the mean or mid-value during the procedure of task realization in practical applications.AndA(t)=(g(W)−g(W))˙W+ξ(t),is the total disturbance of the systems encountered.Thus,equation(12)gives an ADRC oriented eye-hand-torque coordination model.Following the principle of ADRC,we can formulate the control system.
However,it is still unclear the specific meaning of torque in the eye-hand-torque coordination system,since torque is not a physical entity like “eye”and“hand”.How to effectively design an eye-hand-torque coordinator,and how can we guarantee the stability of the eye-hand-torque coordination system with ADRC based on equation(12)are still open problems.
5 ADRC in simultaneous localization and mapping(SLAM)

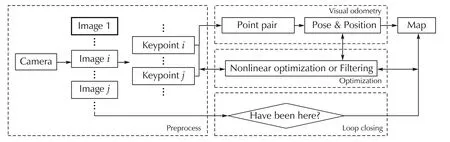
Fig.4 A typical SLAM procedure.
whereIidenotes theith image,Crepresents the image process with environmente.While coming a new image,there comes the features extraction stage and obtains key points,

whereEmeans the feature extraction algorithms,andkis are the key points obtained from imageIi.
After obtaining enough key point pairs,one can compute the pose and position changes ρ following the key point matching algorithmsM,

whereGis the relationship between the pose and position and the matched key point pairs.Thereafter,one can further improve its localization and mapping accuracy by solving a nonlinear optimization problem,

wheref(k)means the estimation of the coordinate of the key pointkunder camera coordinate system or the world coordinate system.δ is a noise term.Finally,the localization and mapping performance can be further improved by loop closing detection.
During the above procedure,one would be usually confronted with large distortion,such as Fisheye camera,which makes it hard to be calibrated precisely in equation(13).It is almost impossible to extract featureskithat can be robust to any arbitrary environment,such as changing illumination,occlusion,etc.The estimation error in equation(15)will deteriorate the localization and mapping performance severely.Although these uncertainties have been recognized widely and been addressed from different perspectives in the last decades,it is not yet clear what the best method is.We think that,for service robot localization and mapping,the SLAM performance degeneration may be caused by different aspects of uncertainties from different stages as stated above,and we cannot explicitly clarify the uncertainty source and model it,what we can do is to estimate the total influence caused by all uncertainties,then compensation mechanism can be designed to eliminate the influence,which is just the idea of ADRC.However,as presented before,the uncertainties during the SLAM procedure are usually described through probabilistic approaches.It is still an open problem for how to describe ADRC with the help of probabilistic methods,especially Bey esian methods.Therefore,these challenges propels us that the idea of ADRC should be studied deeply and broadly,so that ones can break through the general framework,i.e.,double integrator based ESO,TD and NLSEF,and more diverse descriptions developed by mathematicians can be easily applied to solve different problems from different domains.
6 ADRC in human-robot interaction through network
Network induced imperfections have been intensively studied in networked control systems(NCS)[28–30].It is shown that,for a particular NCS,the different types of imperfections listed in Introduction part may not occur simultaneously in practice,and the effects of some imperfections in certain network may be minor,e.g.,the time delay can be ignored in a real-time network,and the quantization errors are negligible in high bandwidth Ethernet.For Internet based service robot human-robot interaction,it is shown that time delays and packet loss impact the performance more severely[58].
A typical approach for dealing with time delays is to regard an NCS as a traditional input-delay system,e.g.,in linear cases,as

whereKis the state feedback controller gain,τscand τcaare the time-varying delay in the feedback channel and forward channel,respectively,with 0≤τsc+τca≤d.ϕ(t)is the initial condition.Then constructing an appropriate Lyapunov-Krasovskii functional and derive the condition for system stability,performance,controller design and filter design.
The packet dropouts in both feedback channel and forward channel are usually modeled via a stochastic process,that is
where{α(k)}and{β(k)}model the packet loss phenomenon as independent Bernoulli process,for the feedback and forward channel,respectively.It is assumed that{α(k)}and{β(k)}obey the probability distribution,Pr{α(k)=1}=E{α(k)}=α,Pr{α(k)=0}=1−α,and Pr{β(k)=1}=E{β(k)}=β,Pr{β(k)=0}=1−β,where{α(k)=1}and{α(k)=0}denote the success and failure in the packet transmission,respectively,which also holds for{β(k)}.Thus,we haveuk= α(k)β(k)Kxk.
Although network induced imperfections have been addressed widely in the last decades.It is rarely effective in practice,since it is very hard to specify the timevarying delays in the feedback and forward channels in equation(17).The assumption of Bernoulli process in equation(18)may deviate from real situations largely.We think that,for service robot human-robot interaction,it is hard to guarantee the performance for just taking only a part of network induced imperfections into account.Since,generally,various types of imperfections lead to the results jointly.What is worse is that we cannot even figure out which kind of imperfections leads to the undesired results.Therefore,there is no doubt that the above stated methods would not be effective in some practical applications.
In addition,the aforementioned methods aim to control the robot directly following user’scommands,which usually need intensive interactions.Under this circumstance,network induced imperfections may be aggravated due to the huge amounts of data transmission.Thus,it is essential to seek solutions by resorting to the autonomy of the robot.Additional specially assigned intelligence might be embedded into the robot,so that the robot could understand the user’s command and execute the assigned task autonomously without frequent interactions with user.Following this idea,Su[58]presents user intention modelling based networked robot control scheme,which aims to infer the state of user intention,given robot state sequence and commands that the robot has received.In this way,the inferred intention model,instead of the user,issues the command to control the robot to perform the user’s desire action as long as the true intention is captured.Hence,communication between the robot and the user is minimized,and so is the impact of network induced imperfections upon system performance.
However,given complex tasks under uncertain environments,there needs huge amounts of data for successfully inferring the user intention.Furthermore,this data-driven based user intention modelling scheme relies heavily on high quality data.While in the networked environment,network induced imperfections will reduce the data quality severely,and so is the success rate of intention modelling.Therefore,it is a big challenge for how to successfully infer user intention under network induced imperfections.
As stated above,the unacceptable impacts caused by network induced imperfections in the service robot system are that they will cause performance deterioration or even endanger the system stability.While in the perspective of ADRC,we can regard all the imperfections as total disturbances,then an extended state observer can be constructed.Thus,by the principle of ADRC,we can eliminate the impact of imperfections.However,how to deploy in practice is still an open problem,since,it is difficult to formulate the networked control system into double-integral-chain model,such as describing the Bernoulli processes in the framework of ADRC,and then integrating the Bayesian filtering technique into ADRC.Therefore,there is a long way for us to deal with network induced imperfections during HMI for service robot under the framework of ADRC.
7 Conclusions
In this paper,we focused on presenting the problems and challenges from five aspects,i.e.,motion control with unknown composite disturbance,uncalibrated visual servoing subjected to nonholonomic constraints,eye-hand-torque coordination,simultaneous localiza-tion and mapping and network based human-robot interaction,which would be encountered when dealing with intelligence evolution for service robot when applying ADRC.For convenience,the challenges and related works are summarized in Table 1.By analysis,we think that,some physical properties should be reconsidered in the perspective of ADRC,such as nonholonomic constraints.The idea of ADRC should be studied deeply and more diverse mathematical tools should be introduced to deal with more problems,such as SLAM and network induced imperfections.In addition,more troublesome applications,such as uncalibrated visual servoing with nonholonomic constraints and eye-hand-torque coordinations,should be considered under the framework of ADRC.By doing so,we hope that more researchers will join us to enrich the research of ADRC by developing new theories and mathematical tools,and promote the application of ADRC to more challenging problems.

Table 1 Summary of challenges and related works.
猜你喜欢
杂志排行

Control Theory and Technology的其它文章
- From flatness,GPI observers,GPI control and flat filters to observer-based ADRC
- Embedded model control:Reconciling modern control theory and error-based control design
- Development of nonlinear disturbance observer based control and nonlinear PID:A personal note
- Active disturbance rejection control:some recent experimental and industrial case studies
- Active disturbance rejection based load frequency control and voltage regulation in power systems
- Editorial