基于光电探测器的激光定位系统设计
2018-10-31陈宏达刘鹏王晓曼牟畅
陈宏达,刘鹏,王晓曼,牟畅
(长春理工大学 电子信息工程学院,长春 130022)
激光定位是对光电信号进行处理获得光斑质心位置的一种技术,应用在位移测量和探测目标的实时跟踪。以光电探测器件为核心的测量系统是研究的热点,同时激光三角法是很经典的定位测量方法。当目标发生位置变化时,探测器输出的信号计算光斑质心位置得到物体相对位移。可广泛应用于激光制导、自由空间的激光通信、精密工业检测等领域。未来激光测距技术发展方向一定是高度集成、低功耗的。目前市面上有很多种光电探测器件,进行对比后选择PSD。随着PSD的发展和改良,在工业和农业,还有航空和军事领域都起到了非常重要的作用,更广泛的应用于各个领域。STM32系列芯片是意法半导体公司开发的一种ARM内核系列产品的总称,这一系列产品有着成本低功耗低性能优良等特点。本系统以激光三角法为基础基于PSD和STM32的设计,小巧灵便、处理速度很快、精度也很高具有很高的实用价值。
1 器件选择及工作原理
1.1 光电探测器件的选取
目前常用的光电探测器件主要有QD(四象限探测器)、CCD(电荷耦合器件)和PSD(位置敏感器件)。QD存在死区,光斑很小时很容易影响测量结果的准确性,而且测量的动态范围也很小。CCD响应速度慢驱动电路也复杂,信号是非连续性的。综合以后所以选择PSD(位置敏感器件),因为其具有结构简单、响应速度快、分辨率高、不存在死区、可靠性好等优点。
1.2 PSD工作原理
PSD光电传感器是已经发展起来很成熟的一种新型的位置探测器,PSD是通过把对光感面上入射光斑位置转换成电信号进行输出的一种光电器件。PSD一般为P-I-N结构,机理与光电二极管类似,PSD的即时探测精度和光斑尺寸无关,只与光斑重心有关。输出X1、X2、Y1、Y2。它的坐标原点选在PSD器件的几何中心,则有公式如下:
入射光斑落在PSD器件感光面的不同位置时,感光器件将会输出不同大小的电信号。通过计算对此输出电信号的处理就可以得到光斑坐标,即可确定入射光斑在PSD感光面的位置。本文采用S5990-01型号的PSD器件,分辨率为0.2mm,敏感区为4.5mm*4.5mm,L=4.5mm。
2 系统设计
2.1 激光三角法原理及光路设计
由于激光三角法结构简单抗干扰性强所以实用性很强,具有高稳定性和高测量精度的优点,被广泛应用于测量定位领域。其原理是将激光照射到被测物体表面,利用透镜收集漫反射光斑,然后汇聚到光接受器件上,当被测物体移动的时候光斑也会对应移动。根据入射光和被测物体的夹角不同,它分为直射式测量和斜射式测量,直射式适合表面不是特别粗糙的物体而且光斑很小并且结构紧凑实用,所以采用直射式三角法,PSD接收到被测物体的聚焦反射光,图1为基于PSD进行设计的直射式三角法的光路原理图。

图1 直射式三角法光路原理图
由图可以推导出公式:

其中,Δd是被测物体距离,Δd'是光斑在PSD光面上移动的距离,d0是物距,d1是像距,β是主光轴和PSD的夹角,θ是入射光和反射光的夹角。被测物体由M移动到M’处,PSD所接收到的光斑位置由O’移动到了A’。为了满足成像公式,所搭建的光路系统必须满足理想成像条件,PSD接收透镜和激光光轴它们所在的平面相交同一点。并且被测物体移动的最大距离为4.5mm。本系统实验选择物距d0为60mm,像距d1为20mm,由于都是已知量,Δd'的值要小于1.5mm,但不能太小,选用的凸透镜f为15mm,根据实验要求比较以后最后选定θ为48度、β为73度、所以可以求出Δd。
2.2 信号处理电路的设计
PSD的输出信号很微弱,而且输出的电流信号不方便测量,所以设计了一套信号处理电路方便检测流程如图2所示。

图2 信号处理流程图
根据流程图绘制原理图对放大电路的具体参数和设计如图3所示。
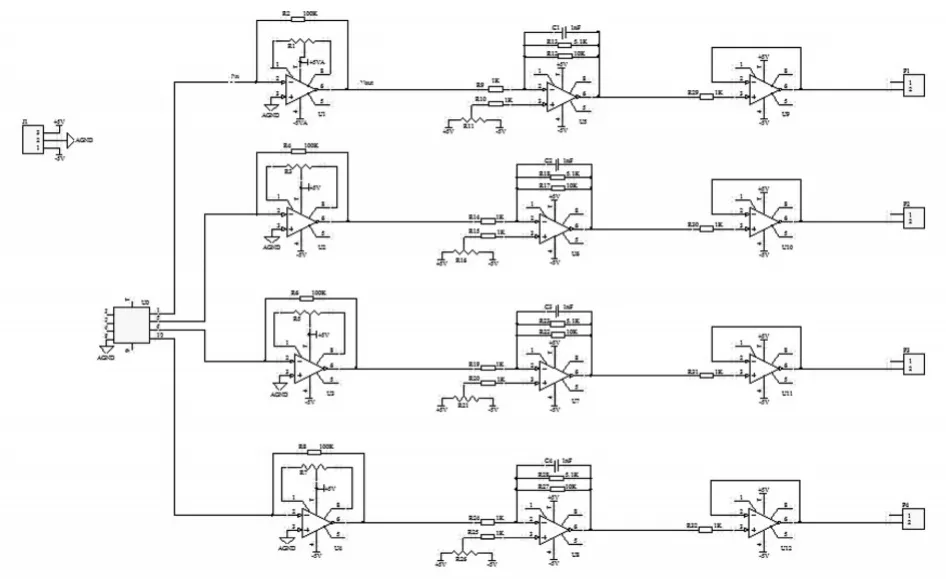
图3 放大电路原理图
由图3可知第一部分是电流放大器,是一个电流——电压转换器(I/V变换部分)。第二部分是滤波和电压放大电路,第三部分是信号跟随部分,起到缓冲隔离和提升带载能力。根据测量需要的不同还可以调节滑动变阻器来改变放大倍数。这里选用的放大器型号是OP07CP。通过此套电路的设计可以对PSD的输出电流信号进行处理方便后面采集运算。最后将处理的信号输出给STM32进行AD处理。
2.3 STM32ADC采集
将处理过后的信号输出给STM32进行ADC采集,本文选用STM32F103ZET6芯片,接口丰富功能强大,内部AD直接进行采集,采集后的数据直接显示在由STM32驱动的LCD液晶屏上,方便直观。液晶屏驱动方式是用SPI方式驱动。STM32F103ZET6芯片的AD是12位逐次逼近型的模数转换器,最大的转换速率为1Mhz,也就是转换时间为1μs,不要让ADC的时钟超过14M,否则转换精度将会下降。转换效果如图4所示。

图4 采集效果图
采集数据后进行运算得到测量位置坐标(X,Y)并且在LCD实时显示出来,进行对比然后可以得到位移量。
3 系统实验检测与结果
为了验证系统的有效性进行了实验,手动调整二维精密转台移动,光源发射激光照射到被测物体上,通过成像镜头成像在PSD上,被测物体发生移动时,光斑在PSD光敏面相应移动,输出电信号。软件部分是以KEIL5为编译环境,以STM32为控制器进行编程,实时采样信号进行运算处理。使用STM32内部AD四路通道进行采集,计算出当前的坐标(X,Y)进行对比后得到位移量。然后把测量的实验结果和物体实际的移动结果进行对比并且计算测量误差。系统流程图如图5所示。

图5 系统流程图
以0.1mm为单位移动1mm,选取十组静态数据测量分析,得到PSD的静态测量误差范围小于6μm,在合理误差范围之内,如图6。

图6 静态误差图
为了测量本系统存在的测量误差,继续做了实验,由于Δd和px,py成比例关系,通过软件计算可算得Δd。把被测物体每次移动0.1mm,在0.2~5.0mm的范围内得到的测量结果如图7所示。
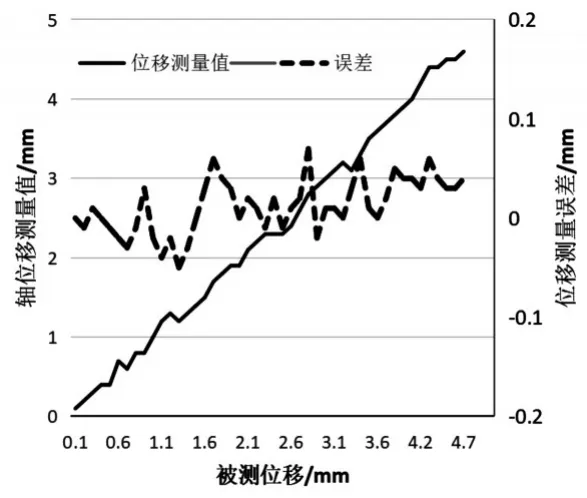
图7 测量结果图
图7为0.2~4mm的范围内测量结果。误差的平均值为0.011mm,标准偏差为0.030mm。对此实验系统进行测量以后对比实验数据,然后对实验结果产生的误差也进行了分析,然后把系统进行了优化在正负4.5mm范围内位移进行快速测量,本系统的实际测量精度为30μm,可应用于精密仪器的测量。
4 结束语
本文根据激光三角法基于PSD和STM32的激光定位系统测量位置具有简单、高效、准确的优点,在平稳环境下进行实验,能够方便、有效的实时对激光位置进行定位,实现微弱信号的精确检测,在此系统的基础上还可以继续提升系统的精度和可用性,加入上位机实时控制。光路系统部分可以更加简洁高效。而且PSD体积小实时性高,整套电路搭载简单,在信号处理部分也还可以加入反馈电路匹配不同反射能力的实物。可能出现的误差方面还可以继续改进,如光学装配和调试误差、系统的背景光、暗电流噪声等。
