基于遗传算法的红外点源目标模拟器测速系统的关键技术
2018-10-31贾克唐智勇王晶东王旭李英
贾克,唐智勇,王晶东,王旭,李英
(1.长春理工大学 光电工程学院,长春 130022;2.长春理工大学 机电工程学院,长春 130022)
红外点源目标模拟器是用于在实验室条件下红外成像导引头对目标探测、目标跟踪以及对红外诱饵等抗干扰性能进行测试的主要设备[1]。红外点源目标模拟器通过控制信号,直接驱动无刷直流电机,带动电机轴上的带轮,使目标源和干扰源随着同步带做抛物线运动。在工作过程中,红外点源目标模拟器会受到摩擦、干扰等多种扰动因素的影响,对电机调速系统有较高的稳定性要求[2]。
采用双闭环PI调节器设计双闭环调速系统是解决电机调速问题的常用方法[3],然而双闭环PI调节器对被控对象的数学模型要求较高,尤其在非线性方面表现的力不从心,容易造成系统的不稳定。因此,有必要探索一种新型的调节器来弥补双闭环PI调节器的缺陷,提高红外点源目标模拟器调速系统的稳定性能。
在红外点源目标模拟器控制系统的设计中,需要考虑工作环境、负载以及位置检测等多方面的影响。为了让系统动态性能更好,在常规的双PI调节器基础上,转速环内采用基于遗传算法整定的模糊PID调节器。
1 红外点源目标模拟器工作原理
通过合理设计红外点源目标模拟器的机械结构和电子控制系统,实现了多诱饵发射方式。结构图如图1所示。红外点源目标模拟器工作时,通过输入指令给控制器,控制安装在轨迹控制盘上的无刷直流电机的转速,同时接收电机反馈回来的转速、电流信号,实时对电机输出转速进行调整。输入信号和输出信号在控制器里按规律进行计算后,转变为电信号经过驱动电路驱动无刷直流电机带动固定有干扰源的同步带进行运动。

图1 红外点源目标模拟器结构图
在红外点源目标模拟器的功能实现中,驱动电机的调速控制对目标模拟器系统性能有着重要作用,由于驱动电机直接带动固定有干扰源的同步带运动,要求调速系统具有快速响应以及较强的抗干扰能力。因此,调速性能是红外点源目标模拟器控制系统研究的主要内容。
2 电机调速模型建立
在电机双闭环控制实现中,需要实时检测电机的反馈信号电流和转速的变化。由于反馈信号检测中常含有谐波和其他扰动量[4],为了抑制各种扰动量对系统的影响,需要在转速和电流反馈回路上增加一阶惯性环节进行滤波[5]。在抑制扰动量的同时,滤波环节也延迟了反馈信号的作用,为了平衡这个延迟作用,在给定信号通道上加入一个同等时间常数的惯性环节。让给定信号和反馈信号经过相同的延滞,使二者在时间上得到恰当的配合。建立调速系统的双闭环控制模型如图2所示。

图2 电机调速系统双闭环控制模型

图3 优化对象数学模型
在设计电流内环过程中,不允许电枢电流在突然加控制作用时有太大的超调,主要是以跟随性能为主,即调速系统设计为无超调的典型I型系统。由于电机在启动过程中启动电流调节过程远远快于转速与反电势的变化过程,则可以忽略反电势的影响。电流环采用PI调节,则I型电流环传递函数为:

简化后的电机调速系统双闭环模型如图3所示。优化后的基于遗传算法的PID优化对象的传递函数为:

其中,
式中,ki—电流调节器的比例系数;ks—电流调节器的积分系数;β—电流反馈系数;R—电机电枢电阻;Tl—电磁时间常数;Ts—PWM装置的延迟时间;Toi—电流反馈时间常数;Tm—机电时间常数。
3 遗传算法对模糊PID控制器参数的优化
在自适应模糊PID控制基础上,利用遗传算法对模糊变量的隶属度函数参数和模糊控制规则进行优化,可以使模糊控制系统具有自学习、自组织和自校正功能。模糊控制系统的结构图如图4所示。

图4 基于遗传算法的模糊PID控制系统
其实现方法是在确定待优化的控制规则表和隶属度参数情况下,采用合适的编码方案,将控制规则表和待优化的隶属函数参数统一编码,进行优化[6],具体优化过程如下:
Step1.建立红外点源目标模拟器电机调速系统的数学模型,确定调速系统中待优化的参数;
Step2.对控制参数进行编码,并生成初始种群;
Step3.根据调速控制系统的性能要求,计算适应度函数;
Step4.设计遗传算子,确定遗传算法的运行参数;
Step5.进行遗传操作,生成子代种群,判断是否满足终止条件;
Step6.解码,输出最优参数,在电机调速系统中运行。
3.1 隶属函数和控制规则的编码
三角形隶属函数可以快速反映出一个相应的调整量,因此适合用于在线调整数据过多的系统中[7]。选取三角形作为隶属度函数图形,模糊论域划分示意图如图5所示。将三角形的三点横坐标作为待优化的参数,对{x1,x2,x3,x4,x5}进行十进制编码,其中 -3<x1<x2<x3<x4<x5<3,这样隶属度函数的编码为5*5=25位的编码串。

图5 模糊论域划分示意图
对于模糊控制规则的编码,约定1,2,3,4,5,6,7分别代表模糊语言变量的七个语言值NB,NM,NS,ZO,PS,PM,PB。对于两输入三输出的系统而言,模糊控制表中有7×7=49条规则,则编码串的长度为3*49=147位。
将隶属度函数的编码和模糊控制规则的编码联合起来进行统一编码,构成编码串长度25+147=172位的染色体进行优化。
3.2 适应度函数的选取
根据红外点源目标模拟器调速系统响应快、超调小的性能要求,选用误差绝对值时间积分性能指标与上升时间作为遗传算法的主要优化目标。选取如下目标函数:

式中:e(t)为系统误差,u(t)为控制器的输出,tr为上升时间。w1,w2,w3,w4为权值。为避免输出响应的超调量过大,引入惩罚函数。系统一旦超调就把超调量作为最优指标的一项,因此w3远大于w1。
将适应度函数选取为:

3.3 遗传算法设计
(1)选择操作
采用比例法进行操作,即每个个体被选择的概率与其适应度成正比,选择公式为:

式中:Psi—第i个个体被选择的概率;fi—第i个个体的适应度;n—种群大小。
(2)交叉操作和变异操作
交叉算子和变异算子分别具有全局搜索和局部搜索的能力,交叉和变异操作中选用单点交叉算子和基本位变异算子。关于参数的确定,根据Srinvivas提出的自适应遗传算法[8],使这两个参数可以自动改变。其计算公式为:

式中:fmax—群体中最大的适应度;favg—每代群体的平均适应度;f′—交叉的两个个体中的较大适应度;f—变异个体的适应度;Pc—交叉概率;Pm—变异概率;其中:Pc1=0.9,Pc2=0.6,Pm1=0.1,Pm2=0.01。
4 仿真结果与分析
通过计算,红外点源目标模拟器调速控制系统优化对象的传递函数为:

模糊系统仿真原理框图如图6所示。
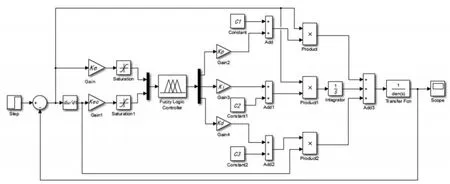
图6 系统控制模型
对于优化对象传递函数式(10)为被控对象,取种群规模为60,迭代次数为100。目标函数式(5)中的w1=0.996,w2=0.03,w3=0.01,w4=100。隶属度函数和控制规则[9]的编码仍然采用十进制编码,然后对遗传优化的模糊PID算法进行仿真。
4.1 单位阶跃响应
在调速系统中,给系统输入单位阶跃信号。为了显示出经过遗传算法优化后的模糊PID调节器的优点,分别进行了双闭环PI调节器和遗传算法优化后的模糊PID调节器仿真,得到图7所示的双闭环PI调节器阶跃响应曲线和图8所示的遗传算法优化后的模糊PID调节器阶跃响应曲线。

图8 遗传算法优化后的模糊PID调节器阶跃响应曲线
由图7、图8仿真曲线对比可知,采用基于遗传算法优化后的模糊PID调节器时,系统无超调,同时响应速度快,并且具有较好的稳定性。
4.2 调速系统抗干扰实验
在调速控制系统中,在0.3s处给系统增加一个脉冲信号,通过对脉冲信号产生时间的控制来模拟系统突然受到的干扰。分别进行了双闭环PI调节器和遗传算法优化后模糊PID调节器仿真,得到图9所示的双闭环PI调节器受到干扰时的仿真曲线和图10所示的遗传算法优化后的模糊PID调节器受到干扰时的仿真曲线。

图9 双闭环PI调节器受到干扰时的仿真曲线
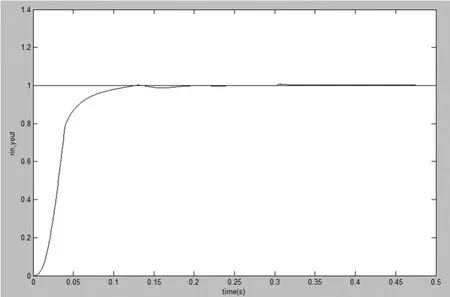
图10 遗传算法优化后的模糊PID调节器受到干扰时的仿真曲线
由图9、图10仿真曲线可知,经过遗传算法优化后的模糊PID调速器与双闭环PI调速器相比能够快速的消除干扰,让系统重新回到稳定的工作状态。因此,经过遗传算法优化后的模糊PID调速器具有更好的抗干扰能力。
5 结论
红外点源目标模拟器在工作时会受到摩擦、干扰等多种扰动因素的影响,对电机调速系统有较高的稳定性要求。基于红外点源目标器调速系统工作原理,采用模糊控制在线修改PID参数,利用遗传算法对隶属函数和模糊规则进行优化,克服了常规双闭环PI调节器难以对非线性系统优化的缺点,实现了调速系统快速、稳定的设计要求。因此,选用基于遗传算法的模糊PID控制方法对红外点源目标模拟器进行控制可以满足系统的控制要求,达到较高的控制精度。
