基于无人机遥感技术的水土保持植被恢复率提取
2018-10-29林成行朱首军巴明坤
林成行, 朱首军,, 周 涛, 巴明坤, 赵 宇
(1.西北农林科技大学 水土保持研究所, 陕西 杨凌 712100; 2.西北农林科技大学 资源环境学院, 陕西 杨凌 712100)
植被建设工程是生产建设项目水土保持的一项重要措施,也是生产建设项目水土保持监测的重要内容。监测工作中林草植被恢复率计算,关键就是植被面积的获得。传统的植被面积统计方法一是利用卫星影像提取植被面积,二是用全站仪实地测量,但两者均存在一定的缺陷。卫星影像一般适用于大范围植被面积的提取,对于生产建设项目水土保持的植被计算,其面积较小,影像资料分辨率不高,满足不了水土保持监测工作的精度要求;全站仪实测虽然精度较高,但费时费力。与传统方法相比,无人机具备快速高效、机动灵活、精细准确、适用范围广、影像实时传输等重要特点[1-2],在小区域快速获取高分辨率影像方面具有明显优势。研究表明,无人机航拍影像可用于植被面积提取,使用无人机技术作为植被面积计算的新手段,可以改变项目监测过程中技术和资料限制,能有效弥补传统计算方法的诸多不足[3]。因此,可利用无人机影像代替传统的遥感影像应用在生产建设项目监测工作中[4]。
小型无人机遥感影像的拼接方法和技术已成熟,高精度的正射影像图广泛用于土地利用分类研究[5],韩文霆等[6]以无人机正射影像为研究对象采用面向对象法提取不同土地利用类型。但目前鲜有基于无人机遥感影像的高精度植被面积提取,并且由于无人机载重有限,只能搭载真彩色数码相机,所获取影像波段较少,影响了植被的识别及分类[7]。因此本次研究在正射影像图提取土地利用分类的基础上,采用计算机和人工目视解译结合的方法,将影像上较难被精准分类的植被在高精度的正射影像上直接矢量化,绘制出不同种类植被的分界线,统计出植被的现状信息,最终实现植被面积的提取。
1 材料与方法
1.1 仪器准备
针对小范围区域进行低空快速摄影需求,本次试验采用大疆精灵4并搭载FC330~3.6相机,获取无人机航摄图像。
1.2 研究区概况
试验区域选择渭南市合阳县水土保持示范园,地理范围为东经110.1389°—110.1429°,北纬为35.2487°—35.2538°,研究区面积为11.81 hm2。在水保分析中,常用植被分类包括有林地、灌木林地和草地等。根据研究目标,以绿化率高的地块为依据,选择植被丰富的示范园核心区。植被组成包括乔木林地、灌木林地、草地。其余地类包括交通用地、设施用地及其他土地。具体分类见表1。
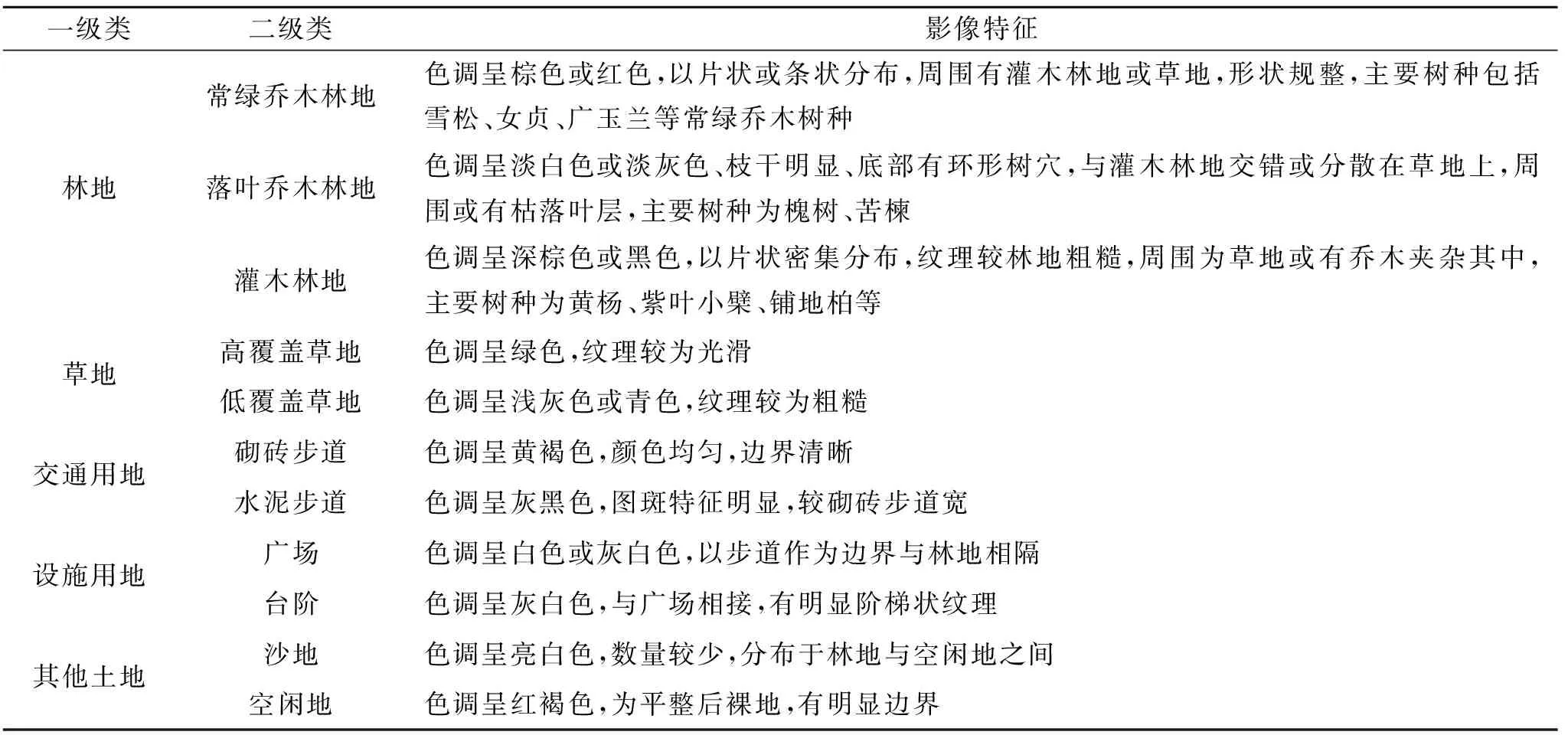
表1 土地利用类型统计
1.3 数据处理
(1) 飞行实施。选定天气晴朗且风速稳定的日子飞行,根据天气状况手动设置飞行参数,飞行参数设置见表2。

表2 飞行参数
为保证成像质量,防止研究区边缘成像扭曲模糊,本次飞行增加研究区周边辐射区补拍(距离研究区边界约100 m范围内区域)。本次试验飞行总时长25 min,共获取影像数据291张,剔除不合格影像数据7张。
(2) 正射影像图制作。无人机航拍正射影像制作软件采用Agisoft Photoscan[8-9],地理坐标系采用WGS-84,投影坐标系采用高斯投影(Gauss-Kruger)即Xian 3 Degree GK CM 111 E。
本次试验主要通过正射影像平面投影进行植被面积提取,需对正射影像平面精度进行验证,由于无人机搭载非量测相机,正射影像的建立是通过软件对航拍影像进行空三解算生成[10]。其中地面像控点是至关重要的一环,不论是控制点的分布还是数量都将直接影响到正射影像的解算精度。
像控点布设应该考虑点位清晰、周围环境空旷无遮挡,易于辨别,地表起伏不大。试验以制作1∶2000正射影像图为依据,共选取像控点5个,利用RTK对其精度进行检查。结果表明,其平面平均中误差为0.231 5 m,根据《1∶500 1∶1000 1∶2000地形图航空摄影测量外业规范》(GB/T7931~2008)规定,满足≤0.5 m中误差精度要求。
2 结果与分析
2.1 正射影像图裁剪
利用Envi Classic影像裁剪功能得到想要的研究区,然后对该研究区进行分析。影像裁剪包括空间裁剪和波谱裁剪,其中空间裁剪又包括按行列号、影像、地理坐标、文件、感兴趣/矢量、滚动窗口的裁剪。试验采用的是按矢量边界进行不规则裁剪。以无人机航拍制作的由4个波段组成的正射影像图作为数据源,即原始的遥感图像(图1),以波段3,2,1模拟真彩色图像合成RGB进行显示[11]。图1成像效果总体偏暗,这是由于在航拍过程中,考虑到光照变化对成像质量的影响,飞行实施采取低曝光手动相机模式。一是降低了航拍对光照的依赖,二是防止成像过程中由于光照变化导致色彩不均匀现象,三是尽量减少地物阴影的形成,从而提高分类精度。(1) 最优裁剪边界。图像裁剪的意义在于提取研究所需区域,去除非关键区域的影响。裁剪部位需满足以植被为主,同时具备多种地类作为对比。裁剪的界限以明显的地物特征作为识别依据,裁剪的结果应有利于后期地物分类及面积提取。根据研究目的,以道路作为边界,选择植被集中区域作为裁剪对象。(2) 绘制矢量边界。图像的土地利用分类及面积提取是建立在图像包含矢量数据的前提下。裁剪的关键在于利用矢量图层对原有影像进行分割,即对裁剪边界进行矢量化。本次试验通过对正射影像图绘制矢量多边形,并对多边形矢量化,生成矢量化文件。(3) 生成感兴趣区域(ROI)。将研究对象转化为感兴趣区,有利于减少图像处理时间并提高裁剪精度。若要利用矢量文件完成裁剪,则需要将矢量文件转换为感兴趣区(需要裁剪的区域),最后才能输出裁剪图像(图2)。
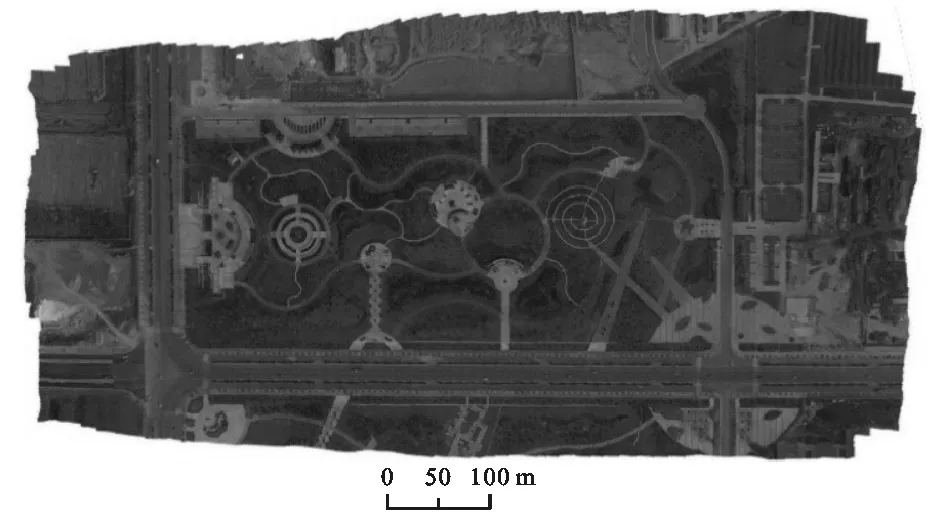
图1 原始正射影像图
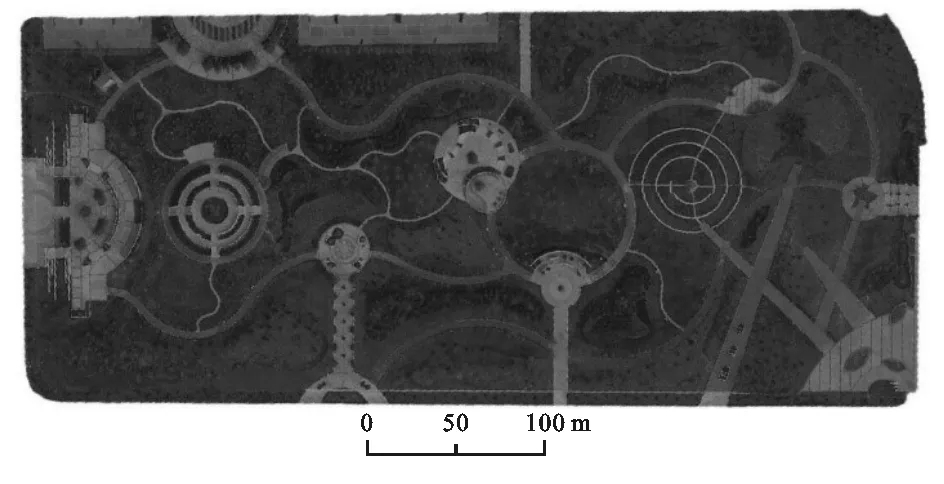
图2 裁剪后正射影像图
2.2 非监督分类及分类结果合并
(1) 非监督分类。非监督分类是目视判别的基础,以颜色参数作为鉴别依据,呈现出图像光谱的异质性。本次非监督分类采取IsoData算法即(迭代自组织数据分析技术),计算正射影像图数据空间中均匀分布的类均值,然后用最小距离技术将剩余像元进行迭代聚合,每次迭代都重新计算均值,且根据新均值,对像元进行再分类。对于小范围区域的非监督分类效果以分辨率≤0.5 m为优,采用0.2 m分辨率正射影像即可识别大部分地类[12],且可在较高精度下提取植被面积。具体参数设置见表3。
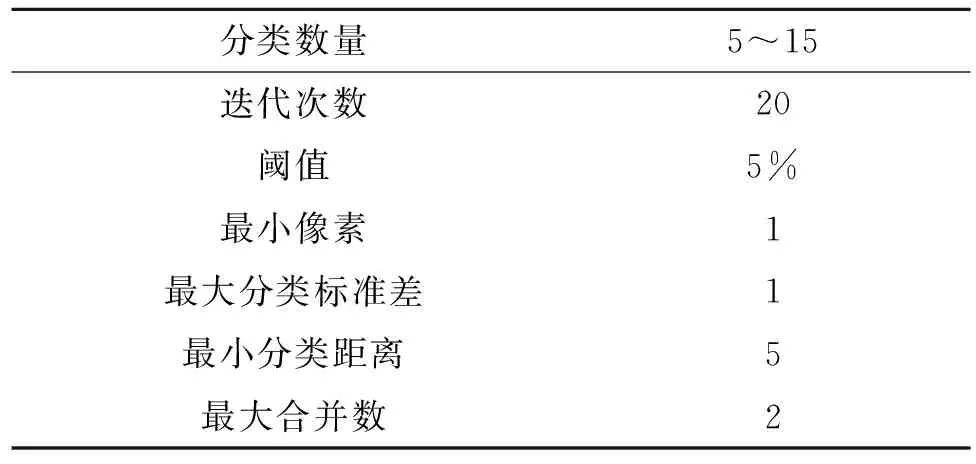
表3 IsoData算法参数设置
(2) 分类结果合并。分类数量设为5~15时,分类像素较小,图像像元较为零碎,同一类型地类存在多种分类结果,见图3。由于非监督分类在图像识别过程中仅依靠影像上不同类地物光谱信息进行特征提取,对于细小像元颜色差异较为敏感。一般情况下,同一地类在成像上存在多种光谱信息,这是造成识别困难的重要原因。对多种分类结果进行合并,有利于缩小分类结果差异,提高目视识别判读准确性[13]。
对分类结果(图3)进行合并,同一类型地类归为单一地类。如乔木林地、灌木林地、草地可合并为绿地,其余合并地类(表4)包括步道、广场以及空闲地。分类图像经合并后已可以较为清晰分辨出地物轮廓,合并结果如图4所示。
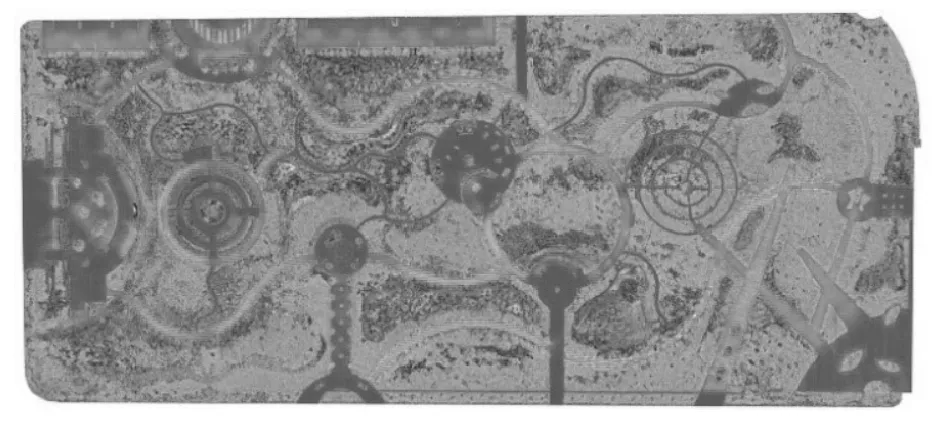
图3 非监督分类结果
图4 土地利用分类结果合并
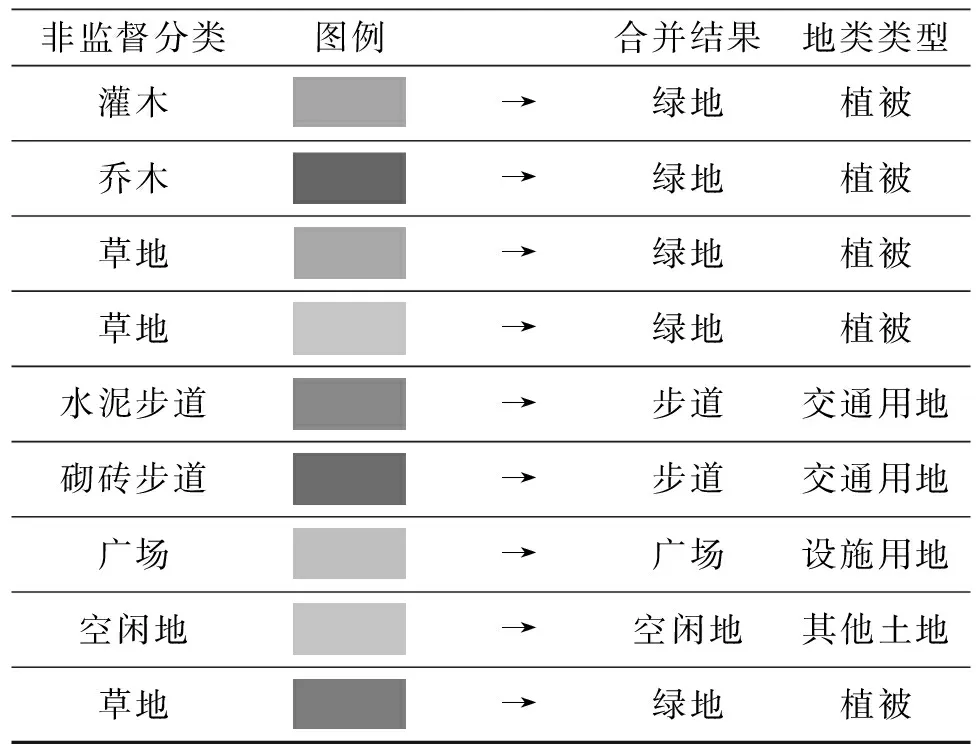
非监督分类图例合并结果地类类型灌木→绿地植被乔木→绿地植被草地→绿地植被草地→绿地植被水泥步道→步道交通用地砌砖步道→步道交通用地广场→广场设施用地空闲地→空闲地其他土地草地→绿地植被
2.3 分类结果编辑及输出
分类结果中植被总体呈现为绿色,但由图4仍可看出少数非植被地类掺杂其中,这在分类过程中属于错分、漏分的像元,表现为色彩斑驳且不均匀。这是由于原始影像在经过分类结果合并后,土地利用分类结果存在同物异谱及异物同谱现象,分类结果(如绿地)识别差异较大,很难接近实际分类效果。这里的原因有自动分类算法的问题,也有实际光谱的问题。所以,分类合并结果还应该在人机交互下目视识别进行修改[14],最终才得到想要的结果。
对于上述分类结果,利用目视判别准则,对局部错分、漏分的像元,可以进行手动修改。本次试验以明显的绿地界限对相邻地类进行区分(图5),并将一定范围内像元并入其他一种地类中,逐步细化分类过程中的差异。试验区域分类样本主要为四大类,即植被、设施用地、交通用地和其他土地。在目视判读过程中,除了考虑地物的光谱特性,还要考虑地物所处的位置、形态特征等因素,从而避免误判或由界线不清造成的不利影响,得到较准确的判读结果。
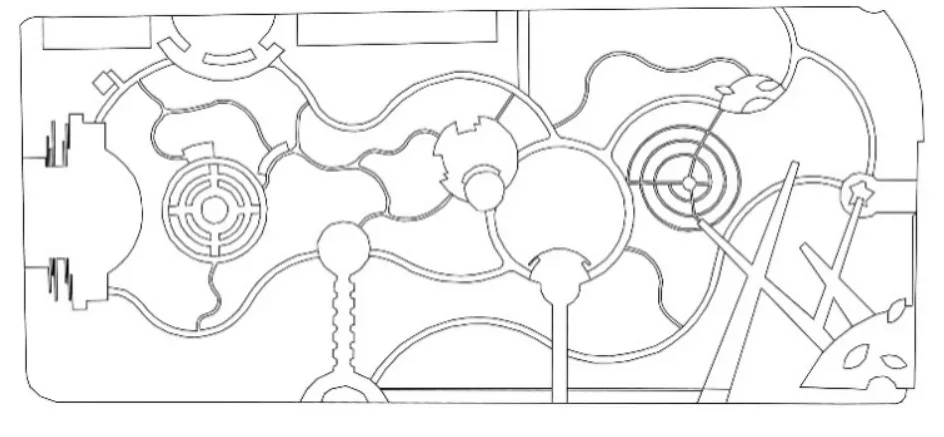
图5 目视识别及勾划
2.4 数据统计与计算
(1) 数据统计。在分类结果编辑时,集中的植被基本可以正确划分,非成片植被利用不规则条状或点状图形进行划分。对于数量较少的零碎植被,在不影响总体植被面积的前提下,可纳入相邻地类。其余地类依据地物特征进行划分。根据分类编辑结果及实测结果(图6)统计出各种地类的面积以及所占比例,见表5。
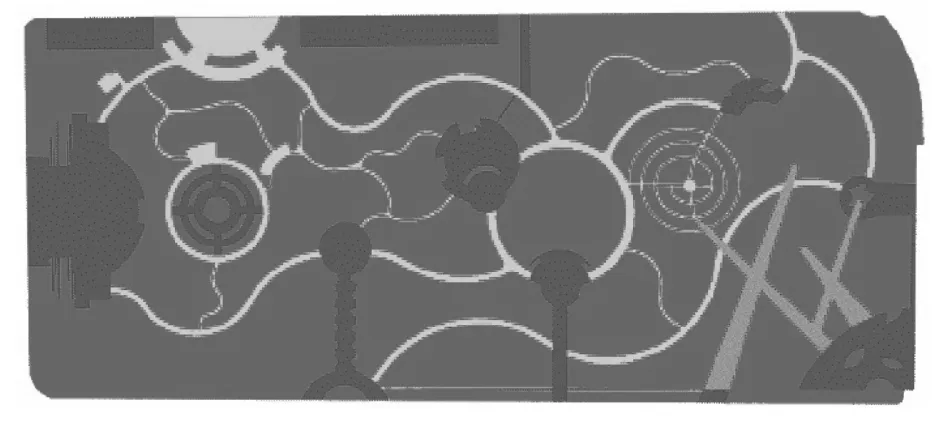
图6 利用目视解释编辑分类结果
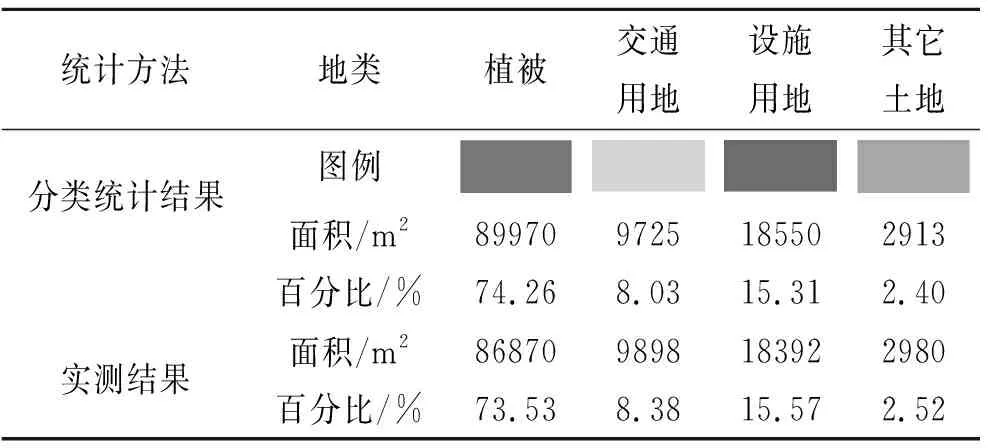
统计方法地类植被交通用地设施用地其它土地分类统计结果图例面积/m2899709725185502913百分比/%74.268.0315.312.40实测结果面积/m2868709898183922980百分比/%73.538.3815.572.52
(2) 林草植被恢复率计算。可恢复植被面积是通过分析论证确定的可以采取植物措施的面积,不含国家规定的应恢复农耕的面积。即本次研究区域可恢复植被面积应不包括原有硬化面积及小部分水域面积,在计算时不考虑原占地类型为农地以及无法实施植物措施的区域。本次可恢复植被面积主要通过现场核查、实地调查得出。
林草植被恢复率是指项目建设区内,林草类植被面积占可恢复林草植被面积的百分比。项目建设区内可恢复林草植被的面积为93 223 m2,植被实际恢复面积86 870 m2,详细结果见表6。

表6 林草植被恢复率计算结果
3 结论与讨论
3.1 结 论
(1) 本文以合阳县水保示范园作为监测项目典型案例,从无人机航拍、遥感数据分析、水土保持基本信息提取3个方面,分析该技术的操作性及效果。监测结果与实际计量结果相比,误差小于10%,满足水土保持监测相关要求。此外,除植被面积,其余地类面积计算同样适合于生产建设项目水土保持监测过程。
(2) 无人机航拍结合Envi分类方法可将复杂繁琐的室外工作转变为高效便捷的内业工作,实现水土保持基本信息获取、分析的自动化,使监测工作精度和效率的提高成为可能,极有可能成为今后水土保持监测工作技术发展方向。
(3) 分类方法采用非监督分类,分类过程中存在同物异谱及异物同谱现象,增加了土地利用分类识别难度,导致需要进行大量的人工目视识别和分析,才能得到可靠的分类结果。
(4) 相比较无人机在水保方面应用的前期类似试验,本文一是在利用正射影像土地利用分类的基础上,对水保难以提取的植被面积进一步细化且提高了精度,二是将以往用于大范围区域的非监督分类用于小范围水土保持监测的信息获取。
3.2 讨 论
(1) 提取植被恢复率与实际相比,误差为3.32%。
比较图6与原正射影像图发现,在实际植被中,树冠覆盖面积与周围地类存在重叠现象(如树冠投影覆盖了道路),而分类过程中未对此部分面积进行筛选剔除,这是造成误差的重要原因。如何细化分类方法、提高分类精度将是下一步试验的关键所在。
(2) 本次试验无人机飞行参数设置比较单一,缺少其他天气因素作为变量参考。针对此问题,考虑后续试验增加多组飞行参数作为对比分析。同时Envi影像处理的主要功能在水土保持应用方面仍有待挖掘。
