智能车场景建模及仿真
2018-10-29郑磊刘涛王宇蒋鑫王新竹
郑磊 刘涛 王宇 蒋鑫 王新竹
(中国第一汽车集团有限公司智能网联开发院,长春 130011)
主题词:智能车 场景定义 动态场景 静态场景 联合仿真
1 前言
汽车行驶安全性是当今世界汽车技术发展重点关注的问题之一[1],为了使汽车行驶更为安全,智能驾驶技术应运而生。随着智能车技术的不断发展,完善的测试评价体系成为支撑开发的必备条件[2],而仿真开发和测试将成为智能车研发的必须环节。未来,智能车将面对数以亿计的场景和工况,而单纯的实车道路测试已很难满足需求。
智能车研究机构和主机厂对智能车的仿真测试进行了深入研究。Waymo开发了一款名为Carcraft的自动驾驶仿真系统,系统中的模型是根据Austin、山景城、凤凰城制作的,还有一些模型用于模拟测试车道场景。截止到2018年8月,谷歌真实车行驶了1287万公里,而虚拟车已经行驶了超过80亿公里[3],谷歌自动驾驶工程师通过实车测试和仿真测试寻找自动驾驶汽车存在的隐患与不足,通过仿真手段回溯存在问题的交通场景片段,从而不断完善算法,与实车测试进行比对,并相互印证。Cruise Automation搭建的虚拟仿真平台在虚拟世界中的仿真速度可达每分钟150次,其仿真方法与Waymo类似[4]。奥迪与Cognata公司合作搭建的智能驾驶汽车仿真平台可根据真实城市创建虚拟城市,并提供各类测试情境,包括可模拟真实条件的交通模型等[5]。微软和英伟达也相继推出了其各自的自动驾驶仿真平台Auto⁃SIM和Drive Constellation[6]。
智能车的仿真、半仿真开发和测试主要包括模型在环(Model In Loop,MIL)、软件在环(Software In Loop,SIL)、硬件在环(Hardware In Loop,HIL)、实车在环(Ve⁃hicle In Loop,VIL)等环节,而虚拟场景的搭建贯穿了全部环节,本文重点研究智能车场景建模及仿真测试。
2 场景定义及结构
2.1 场景定义
对交通场景作如下定义:交通场景为主车及影响主车行驶行为的所有动态和静态要素集合,包括道路、车辆、行人、交通标志、天气等。
2.2 场景结构分层
为了能够实现并规范化虚拟交通场景,将交通场景划分为路网模型、道路模型、环境模型、情景模型、驾驶员模型和交通模型,如图1所示。
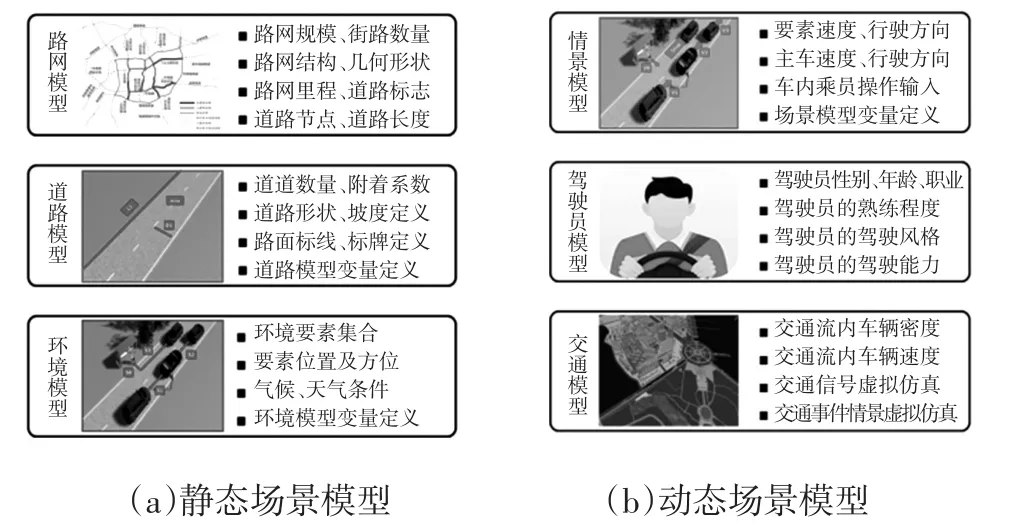
图1 场景结构分层
2.3 场景变量定义
场景变量为主车及影响主车驾驶行为的所有动态和静态要素变量,例如主车速度、交通车的行驶速度、道路长度、车道宽度等。
3 静态场景仿真模型建立
3.1 路网模型
路网模型的内容见图1a。在建立路网模型时,通常有两种方法:以卫星地图为模板,在卫星地图上搭建路网模型;直接使用OpenDrive通用格式,导入路网模型。
如图2所示,搭建的路网模型是较为粗糙的道路,而交通标志信息、车道数量、路面标线和坡道等信息并不完整,需要在场景搭建中进行调整和细化。
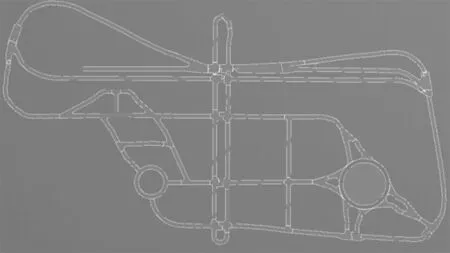
图2 路网模型
3.2 道路模型
基于上述的路网信息,对道路细节进行细化,将缺失的车道数量、附着系数、坡路信息、道路标线和标志牌等信息补充完整。
3.3 环境模型
只有道路的交通系统是不完整的,需添加主车和交通参与者,例如车辆、行人和交通设施等,并定义其位置、方位等信息。此外,还需对当前天气环境进行定义,例如光照条件、雨天、雪天和雾天等。图3所示为设置的环境模型,其中设置了主车和交通车的行驶速度,并设置天气为雨天。
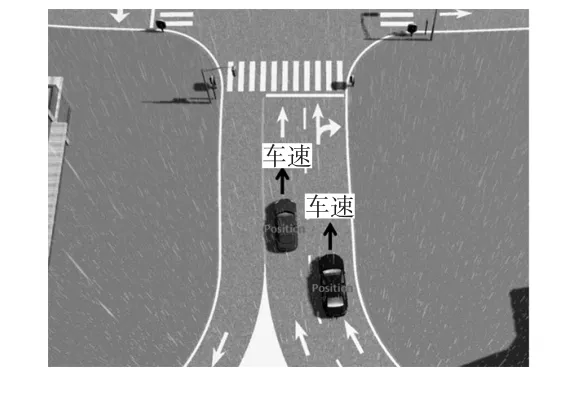
图3 环境模型
4 动态场景仿真模型建立
4.1 情景模型
布置好主车和交通参与者后,对可运动的交通参与者设置初始行为状态、轨迹和路径等信息,使可运动物体遵循设定好的行驶规则前进,如图4所示。
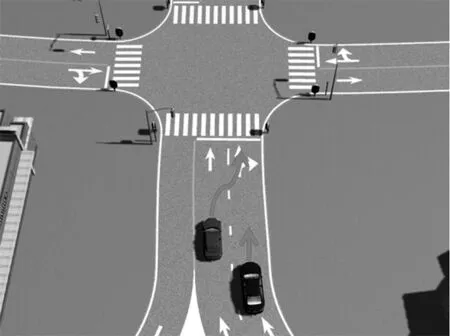
图4 情景模型
4.2 驾驶员模型
驾驶员因其年龄、性别、职业、驾驶熟练程度和驾驶风格的不同表现出不同的行为特点,影响后续的智能车仿真测试和开发。
4.3 交通模型
交通模型是对局部或整个交通系统中交通参与者行为的整体描述,行人和车辆的设置要遵循交通模型。交通模型可由独立于场景软件之外的专业交通流软件进行驱动,形成联合仿真,如图5所示。
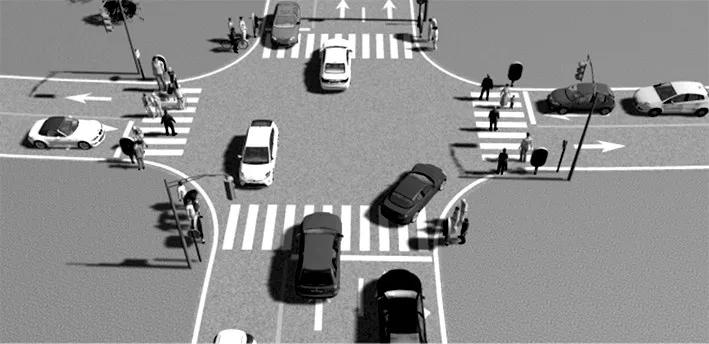
图5 交通模型
5 复杂车辆模型集成
5.1 复杂车辆模型搭建
AMESim是SIEMENS公司开发的模型软件平台,拥有丰富的机械库、内燃机库、传动库、动力学库、液压库、电子库等整车仿真所需模块,能够根据具体的建模车辆结构及配置快速搭建包括发动机、传动系、新能源电机电池总成及车辆动力学模型在内的整车模型,提供MATLAB/Simulink接口,方便与其他场景仿真模型集成,车辆模型编译后添加到S-Function模块中,实现复杂场景模型与复杂车辆动力学模型的联合仿真。动力学模型包括底盘模型、悬架模型、轮胎模型、道路模型、ABS/ESP模型、EPS模型、预设的标准操纵工况及AMESim驾驶员模型[7]。
本文采用15自由度底盘模型,模型具有车身3个方向平动、3个方向转动、4个车轮的转动及跳动、转向盘转动、齿条位移等自由度,能够体现质心位置、转动惯量对车辆动态响应的影响。悬架模型基于KC试验数据,模拟车轮运动状态变化及悬架系统的弹性变形对车辆行驶状态的动态响应。转向系模型可模拟车辆各工况下转向盘力矩,具备模拟转向回正工况的能力,能实现转向盘转角输入和转向盘力矩输入两种转向输入方式。制动系统模型包含蓄能器、液压泵、制动缸、控制阀等ESP液压制动系元件,模拟液压油节流特性。轮胎模型采用Pacejka 5.2模型,模拟稳态、非稳态工况下轮胎侧向力、纵向力、回正力矩、滚动阻力的变化,模拟轮胎外倾角对轮胎力的影响、大侧偏角和大外倾角工况下的轮胎力[7]。
5.2 复杂车辆模型集成
为把AMESim模型应用于仿真场景中,需要将其集成在Simulink环境下使用,因此将其封装为S-Function形式。车辆模型与场景的交互信息主要为轮胎触地点信息等,包括轮胎触地点的位置、高度、垂向速度、垂向加速度和触地点的法向量等。
5.3 车辆模型与场景模型联合仿真
车辆模型与场景模型的联合仿真如图6所示,其中车辆模型只进行了纵向控制,用于验证车辆模型和场景模型集成的有效性。
由于模型需求,车辆初始状态为在水平路面行驶,经过最初跳动后进入稳定状态,然后进行纵向控制。由图6可知,车辆模型可以在场景模型中正确运行,说明车辆模型和场景模型已经正确集成。
5.4 传感器设置
本研究中,对自动紧急制动(AEB)功能和自适应巡航(ACC)功能的控制模型进行了集成和仿真。AEB和ACC功能需要车辆通过安装传感器感知道路环境,从而向控制器输出感知信息。因此,仿真中需要对车辆配置传感器模型。根据AEB和ACC功能的需求,配置了1个长距离雷达和1个短距离雷达,长距离雷达的感知距离为150 m,扫描范围为9°,短距离雷达的感知范围为30 m,扫描范围为80°。
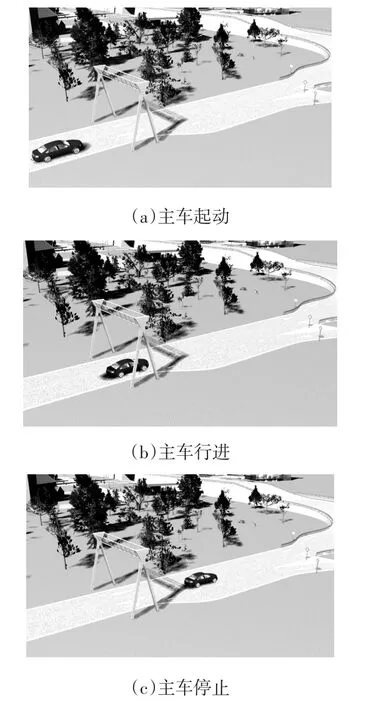
图6 车辆模型和场景模型联合仿真结果
6 仿真结果
6.1 自动紧急制动
AEB功能启动时主要包括3个阶段:碰撞时间为2.6 s时,系统发出警告;碰撞时间为1.6 s时,系统控制制动压力为40%;碰撞时间为0.6 s时,系统控制制动压力为100%。这里以此逻辑验证AEB控制模型是否集成正确。
如图7和图8所示为AEB控制模型、车辆模型和场景模型集成的仿真结果。从仿真曲线可以看出,车辆在AEB工作过程中经历了2段明显的减速度变化。
6.2 自适应巡航
ACC系统是ADAS功能的一种,它是在定速巡航的基础上发展而来的。在主车行驶过程中,安装在车辆前部的车距传感器(雷达)连续感知主车前方环境信息,同时轮速传感器采集车速信号。当主车与前方车辆的碰撞时间小于阈值时,ACC可以通过与防抱死制动系统(ABS)、发动机控制系统协调动作,使主车减速,从而与前方车辆始终保持一定的安全距离。
图9、图10所示为ACC控制模型、车辆模型和场景模型集成的仿真结果。结果显示,主车发现目标车辆并减速跟随目标车辆,失去目标车辆后重新加速行驶,恢复设定的速度。

图7 AEB触发过程中速度和加速度的变化
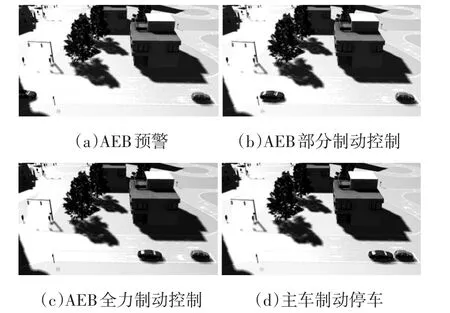
图8 AEB仿真结果

图9 ACC功能触发过程中主车车速和目标车速度变化
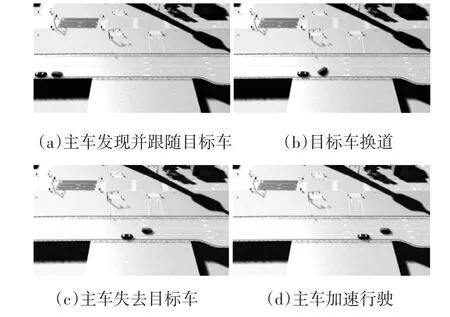
图10 ACC仿真结果
7 结束语
本文对用于智能车开发和测试的交通场景进行了定义,并提出了搭建场景的框架,定义了动态场景和静态场景的概念和范围。通过场景建模和仿真测试方法的研究,规范了场景建模方法,并搭建了仿真测试场景,实现了基于AMESim复杂车辆模型的集成和ACC、AEB控制算法的集成。
