视觉-线结构光组合技术在轨道检测中的应用
2018-10-26许万旸刘艳杰王志恒
许万旸,刘艳杰,李 潘,王 顺,王志恒
(1.天津城建大学 地质与测绘学院,天津 300384;2.北京普达迪泰科技有限公司,北京 100083;3.中车长春轨道客车股份有限公司,吉林 长春 130062 )
1 引 言
当前我国铁路里程长、运输量大,轨道的安全性检测至关重要。对于轨道变形引起的安全隐患必须及时被发现并予以消除。轨道检测的几何参数一般包括轨距、超高、轨向、平顺性等[1]。传统的检测方法主要是人工手段,作业效率低;随着机械自动化处理技术的出现,以轨检车为载体的接触式检测法在一定程度上提高了效率,且不受制于天气情况,但由于集成的传感器比较多,会影响到授流质量和测量精度[2];而以视觉-线结构光组合的非接触式三维测量技术既可以做到实时检测,同时又不会影响授流质量[3]。近年来,国内外都在尝试将非接触式轨检设备应用于铁路检测中。国外的轨检车价格比较昂贵[4],而我国的GJ系列则在平顺性检测等方面存在一定的缺陷,与捣固车的配合作业依然是一个需要研究和攻克的问题[5]。西南交大团队研制的结构光视觉测量系统需在轨道内外侧安置多个相机,同时由于获取的图像背景复杂,处理难度也比较大[6]。
本文继续从视觉-线结构光测量技术入手,设计了一种更为简捷有效的轨道检测装置。仅仅需要两个工业相机和三个结构光光源从轨道内侧构象测量;同时设计红外为主、红色为辅的结构光源,配合红外滤光片从图像来源上剔除杂色背景的干扰,利于后期的图像识别和处理分析。通过一系列的标定和实验,验证了此组合测量技术的有效性。
2 视觉-线结构光组合的轨道测量原理
视觉-线结构光是一种有效的非接触式三维测量方式。在近距离的三维测量中,视觉-线结构光组合往往能够获取比较高的精度和效率[7]。对于轨道这种特殊的被测物体而言,轨道的间距比较大,通常无法直接用单个结构光模型测量,而是采用两个结构光模型分别测量,然后统一起来,从而得到轨道之间的轨距、超高等参数。本文提出的测量装置采用两个相机、三个结构光组合进行轨道测量。系统左部分由一个相机和一个结构光组成三维测量系统,系统右部分则由一个相机和两个结构光组成,左右部分通过支架联系起来,支架上安置有数据处理系统,构成一个简易的轨检设备,如图1所示。
轨检设备沿着轨道行进,两侧各有一套结构光测量装置,相机内参需要提前标定。假定相机和结构光的关系提前精确标定,即结构光平面在对应相机坐标系下的光平面方程已知;同时相机1和相机2的相对关系提前标定,即相机2在相机1下的相对方位已知。对于左结构光模型而言,设相机1坐标系为O-XYZ,结构光平面与铁轨表面的交线为L,三维点P为L上一点,其坐标表示为(XP,YP,ZP)。在轨检车行进的任一时刻,通过对相机捕获的激光线条进行处理计算,即可得到当前位置处直线L上的任意一点的三维坐标。同样,对于右结构光模型而言,可以同时实时获取右轨道表面上激光线条上任意一点在相机2坐标系下的三维坐标。将右模型下的三维坐标点转化到左模型下,即可得到左右铁轨上对应位置在同一坐标系下的三维坐标,进而可以进行各项轨道参数的计算。视觉-线结构光组合的轨道测量流程如图2所示。
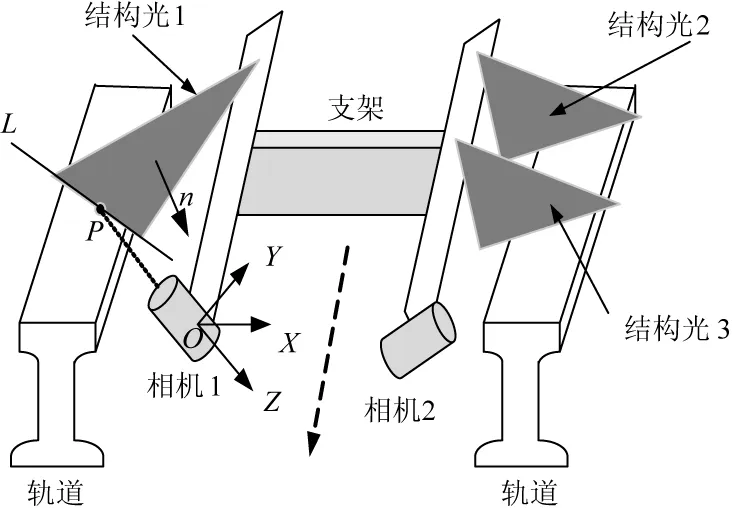
图1 视觉-线结构光组合的轨道测量示意图Fig.1 Track measurements based on the combination of visual-linear structured lights
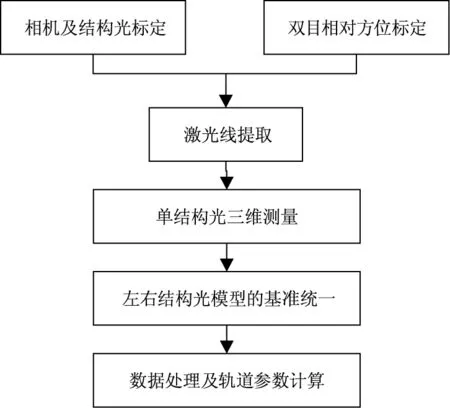
图2 轨道测量流程Fig.2 Track measurement procedure
3 视觉-线结构光组合的轨道测量方法
3.1 单结构光三维测量模型建立
对于一个相机-结构光三维测量模型而言,结构光平面与相机方位的精确标定至为重要。以图1为例,假设光平面的法向量为n,光平面方程表达式为:
aX+bY+cZ+d=0
(1)
式中,a,b,c,d为常数系数;n=[a,b,c]T,各系数可以通过标定获取。假设光平面在相机坐标系下的方程已知,三维点P对应的像点坐标为 (uP,vP),根据摄影成像关系有:
(2)
同时,点P也在结构光平面上,即:
aXP+bYP+cZP+d=0
(3)
三个方程联立,即可求解得到三个未知数(XP,YP,ZP),即P点坐标。如此,整个线条上任意一点的坐标都可以解算。同理,可以得到右轨道表面上两个光条上的任意三维点坐标。
3.2 异向轨道的结构光模型统一
对于左结构光模型而言,光条的三维点坐标是基于左相机坐标系,而右轨道的光条坐标是基于右相机坐标系,左右轨道的三维点坐标不统一。因此需要将右相机坐标系转化到左相机坐标系下,实现异向轨道的结构光模型统一。
假定右轨道上有一点P′,将右结构光模型下三维点P′ 转化到左相机坐标系可以通过公式(4)实现:
(4)
式中,[X2,Y2,Z2]表示P′点在右结构光模型下的坐标;[X1,Y1,Z1] 表示P′在左结构光模型下的坐标;R和T分别表示右相机坐标系在左相机下的旋转矩阵和平移矢量,一般通过双相机标定可以得到。
3.3 轨道图像光条提取与处理
线结构光投射的光线与铁轨表面相交成直线状。由于激光有一定的强度,直线宽度上并不是由单像素组成,图像提取时直线上的每个部位都是由多个像素构成。需要先通过滤波进行噪声去除,后进行亮带细化、中心线条提取、线条端点提取,以计算有关轨道参数。

(5)

图3 光条提取与计算Fig.3 Strip extraction and calculation
4 实验与验证
取一段铁轨置于实验室内,平行放置,轨间距为1435 mm。轨检小车设计简易,没有安装倾角仪、加速度计等传感器,因此只进行轨距测量实验。两个相机为德国Basler工业类型,型号为SCA640-90 gm,分辨率为659×494,像元尺寸为7.4 μm2;三个结构光都是红外线激光器,功率为200 mW,发射的激光含有部分红色光,以实现可视化引导,特别有利于调试阶段使用;相机镜头处安装有跟红外激光波长匹配的红外滤光片,原则上只允许红外激光能量通过;相机和结构光以一定的交互角度安置,保证最佳方位测量。检测系统如图4所示。
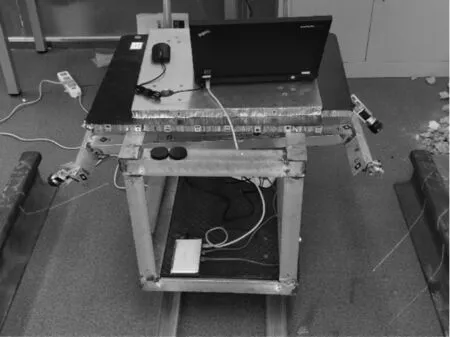
图4 轨道检测简易系统Fig.4 Track inspection simple system
由于工业相机畸变比较明显,因此在进行测量实验之前,首先利用十参数标定法进行相机的内部参数标定[7],标定结果如表1所示。
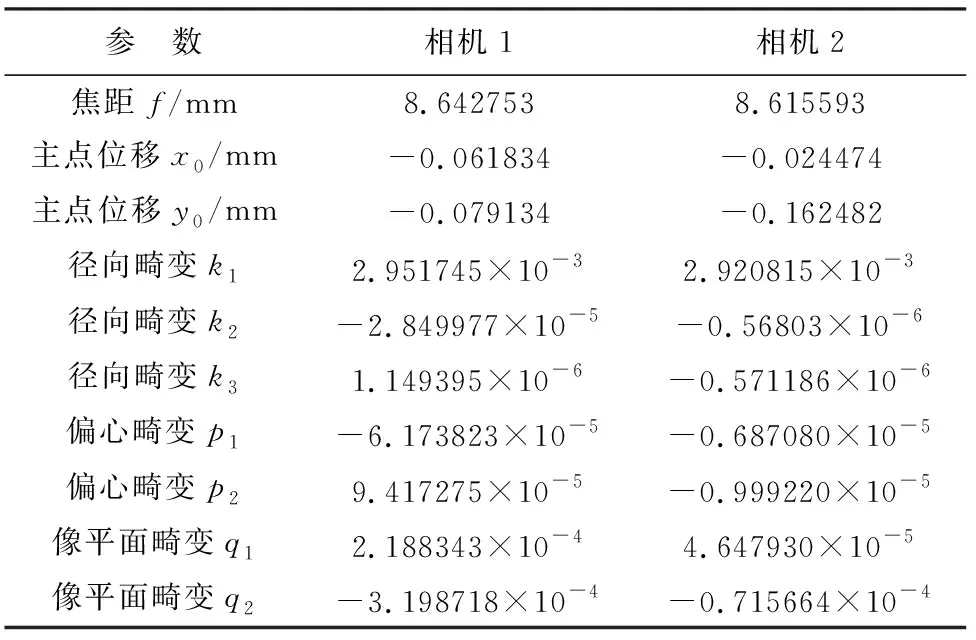
表1 相机内部参数
相机和结构光的标定也在室内进行,采用基于圆形靶标的简易标定法[8]。一个空间平面的确定需要平面上一点和平面法向量,如公式(1)所表达。表2列出了各个结构光平面上一点及相应的法向量参数。(对于表中参数,结构光平面1是基于左相机坐标系,结构光平面2和3是基于右相机坐标系。)
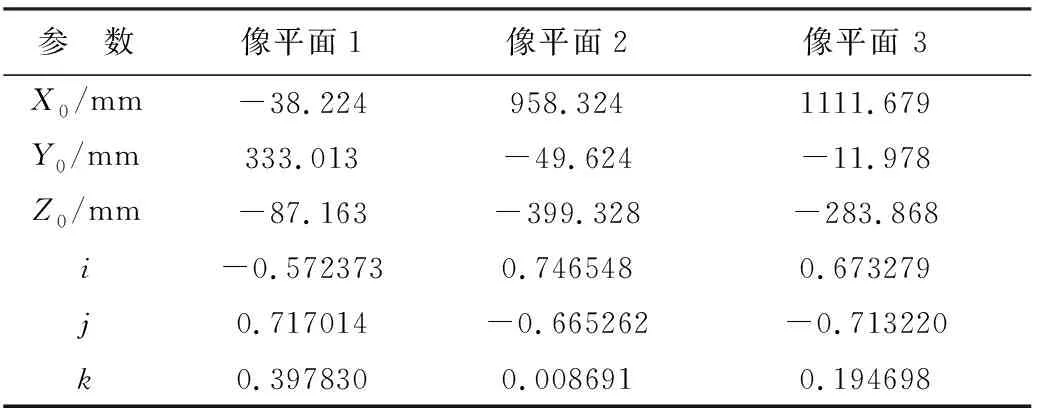
表2 结构光平面方程参数
接下来对左右相机的相对方位进行标定,得到右相机坐标系在左相机坐标系下的旋转矩阵和平移参数。标定结果如表3所示。

表3 右相机在左相机下的相对方位元素
所有标定工作完成以后,开始测量作业。轨检车缓慢移动,两个相机通过同步控制装置实现同步拍摄,帧频为10 f/s,在8 s的时间内,共采集了80张影像。由于滤光片过滤掉了所有非红外的能量,采集的图像结构光线条对比度特别明显,如图5和图6所示。直接获取的图像就如同二值化后的效果一样,几乎没有背景杂色的干扰,特别有利于后续的图像精确和快速处理。首先对获取的影像进行畸变校正,然后经过直线提取、直线拟合、端点的中心像素提取、中点定位,即可利用整个结构光模型系统实时的对轨距进行测量。从图像中可以明显看出,线条的两个端点和中心点可以很容易被定位出来,按照3.3节的计算方法,可以直接解算轨距。但是,由于没有惯导等定姿定位设备,作为基准的左相机坐标系无法跟大地水准面产生关联,故无法对超高、水平等参数进行检测。
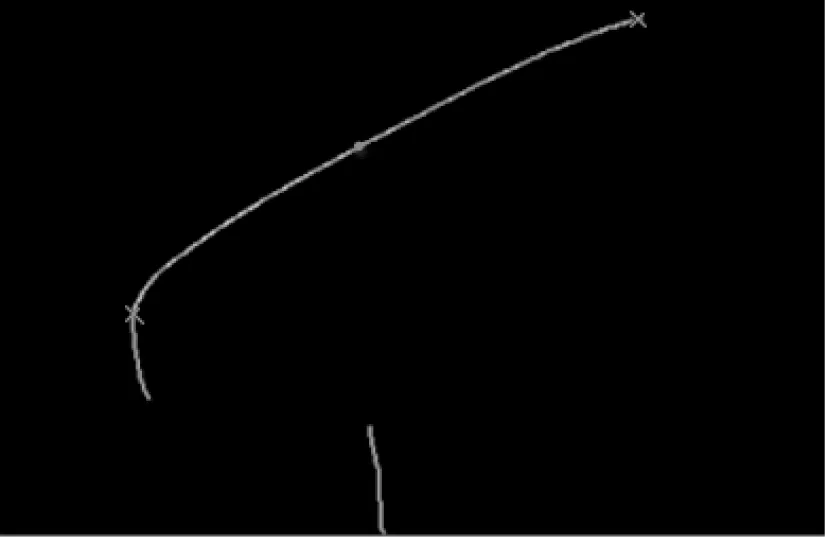
图5 左轨道图像Fig.5 Image of left track
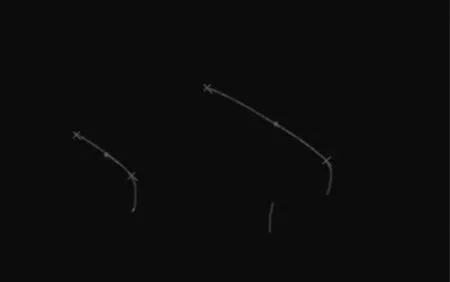
图6 右轨道图像Fig.6 Image of right track
接下来对软件处理解算出的80个轨距数据进行统计。与真实值1435 mm对比,从图7可以看出均值为1435.135 mm,最大误差为0.96 mm,均方根误差为0.56 mm,测量精度达到毫米级,基本满足检测需求。
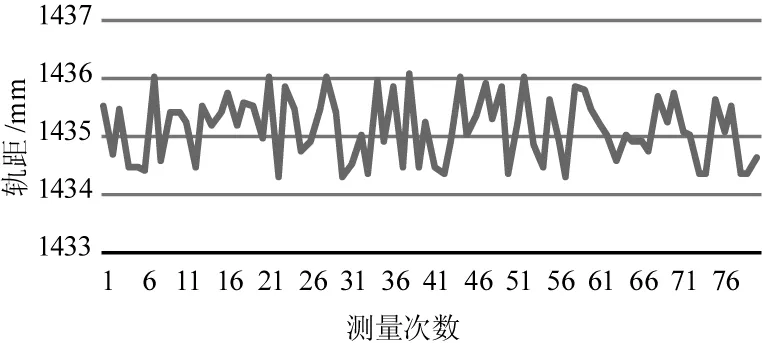
图7 轨距测量值Fig.7 The gauge value
5 结 论
本文设计的视觉-结构光组合测量技术装置简捷易行,只用两个相机即可实现轨道参数的测量。同时,将红外结构光发射器和红外滤光片结合,以红光作为引导,使后期的图像处理简单有效。但是,由于系统尚缺乏惯性导航系统、角度传感器等组件,因此仅仅获取了轨距参数,无法实现超高、平顺性等轨道参数获取[9]。下一步会继续进行多传感器组合研究,实现实际铁路轨道的多参数工程化检测。
