一种人工介入的评估方法
2018-10-26孙学聪魏巍董潇雅
孙学聪,魏巍,董潇雅
一种人工介入的评估方法
孙学聪,魏巍,董潇雅
(陕西重型汽车有限公司汽车工程研究院,陕西 西安 710200)
车辆使用频率日益增长和对驾驶安全的重视程度不断提高,驾驶行为分析已成为行车安全的重要环节。针对驾驶员行为的耦合性、随机性和复杂性,选取方向盘为主要参考依据,结合油门踏板、制动踏板可以有效评估驾驶意图,对驾驶员是否介入车辆驾驶进行准确判断。
驾驶行为;驾驶意图
前言
驾驶车辆在多种场景下,驾驶员进行相关操作,如前方出现拥堵踩制动进行制动操作控制纵向加速度。通过对比分析,筛选驾驶员通常会操作方向盘、踩制动踏板或油门踏板[1]等方式干预车辆运动。如何判断驾驶员介入车辆驾驶行为,是主动安全和被动安全的重要参考依据。本文着重分析了多种条件下驾驶员干预车辆驾驶的行为,为车辆驾驶安全做好评估工作。
1 功能框图
1.1 功能划分依据
依据操纵车辆机构[2]主要划分为三个模块:转向介入模块、制动介入模块、油门介入模块进行行为评估
1.1.1转向介入模块
线控车辆装配的电控转向机构,其可以通过报文形式反馈电控转向状态;可通过各模式下报文变换,判断人工介入程度。
1.1.2油门介入模块
线控车辆装配的电子油门,整车相关控制器采集油门电压信号,通过判断电压变化获取油门开度,并通过报文反馈油门开度状态;可通过对比油门开度变化,判断人工介入程度。
1.1.3制动介入模块
线控驾驶车辆装配的电子制动系统,其可以通过报文形式反馈电控制动系统状态,通过对比自动驾驶模式下报文与人工驾驶模式下报文变换,判断人工介入程度。
1.2 功能框图
以上三个功能进行分别评估后取“或”后输出评估结果,系统框图如图1所示。
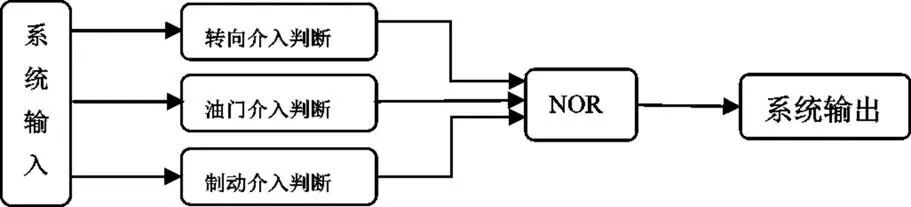
图1 人工介入功能框图
2 各模块功能逻辑
2.1 转向介入功能逻辑
通过请求的转角变化率,与真实的转角变化率的在相邻两个周期内差值;大于阈值时判断驾驶员介入转向操作。
同样,通过请求的转矩变化率,与真实的转矩变化率的在相邻两个周期内差值;大于阈值时判断驾驶员介入转向操作。但考虑到方向盘在自动驾驶过程中会产生抖动,所以需要先判断真实转角的变化率是否小于抖动阈值,若小于认为方向盘自然抖动,没有人工介入。
转矩和转角判断其中之一判定驾驶员操作即认为人工介入,逻辑框图如图2所示。
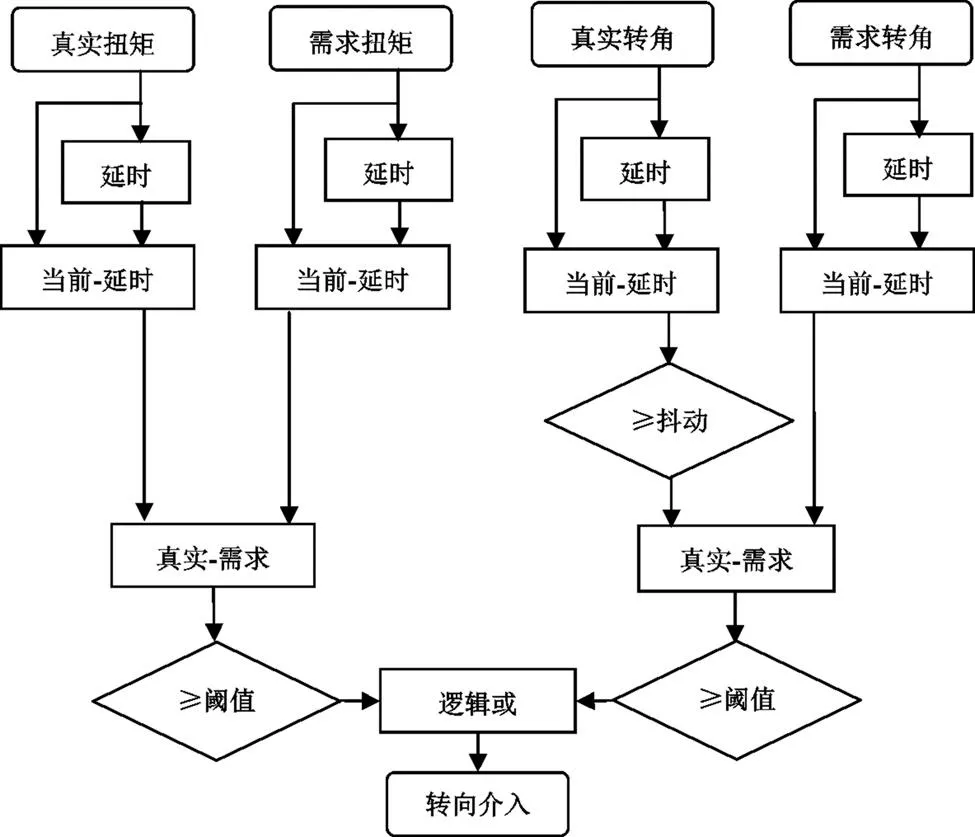
图2 转向介入逻辑框图
2.2 油门介入功能逻辑
通过如巡航请求的油门变化率,与真实的油门变化率的在相邻两个周期内差值;大于阈值时判断驾驶员介入转向操作。而如巡航工况下真实的油门开度应为零,其变化率也应为零。逻辑框图如图3所示。

图3 油门介入逻辑框图
2.3 制动介入功能逻辑
通过如巡航请求的制动变化率,与真实的制动变化率的在相邻两个周期内差值;大于阈值时判断驾驶员介入转向操作。而在如巡航模式下真实的制动开度应为零,其变化率也应为零。逻辑框图如图4所示。
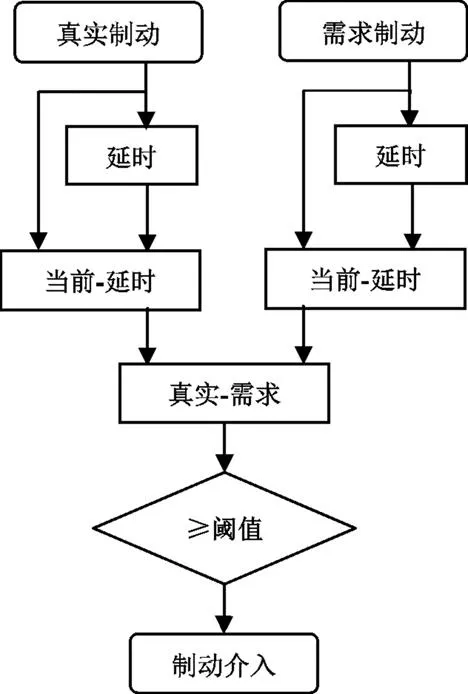
图4 制动介入逻辑框图
3 结论
本文涉及的评估方案是建立在整车线控底盘的基础上,依据总线通讯进行状态分析评估,整车改制需求较少适合于线控驾驶车辆人工干预评估。
[1] 李霖.智能汽车自动紧急控制策略[J].同济大学学报(自然科学版),2015.11.
[2] 余志生.汽车理论[M].北京:机械工业出版社,2009.
An artificial intervention evaluation method
Sun Xuecong, Wei Wei, Dong Xiaoya
( Shaanxi Heavy Vehicle Co., Ltd. Automotive Engineering Research Institute, Shaanxi Xi’an 710200 )
With the increasing frequency of vehicles and the increasing emphasis on driving safety, driver behavior analysis has become an important part of driving safety. According to the coupling, randomness and complexity of driver's behavior, the steering wheel is selected as the main reference, and the accelerator pedal and brake pedal are combined to evaluate the driving intention effectively, and to judge whether the driver is involved in driving accurately.
driving behavior; driving intention
A
1671-7988(2018)20-185-02
U471.3
A
1671-7988(2018)20-185-02
U471.3
孙学聪,男,(1980-),工程师,硕士,现从事智能驾驶技术开发和新能源混动控制策略开发。
10.16638/j.cnki.1671-7988.2018.20.067
