建筑工地动态巡察与扬尘测控机器人研究与应用
2018-10-25马广生左梦坡侯绪冉李亭刘伟
马广生 ,左梦坡 ,侯绪冉 ,李亭 ,刘伟
(中建八局第一建设有限公司,山东 济南 250100)
1 研究背景
1.1 扬尘监测与抑制
我国建筑施工现场产生扬尘较多,是环境污染的主要源头之一。传统监测和抑制扬尘的方法有5种:①在建筑工地的某处设置扬尘监测传感器,并在整个工地设置喷淋管网,当发现扬尘超出规定限值,再开启工地扬尘喷淋系统,从而抑制扬尘;②现场管理人员手持扬尘监测仪不定时不定点抽查,当发现扬尘超出规定限值时,再开启工地扬尘喷淋系统,从而抑制扬尘;③在建筑工地的某处设置扬尘监测传感器,在建筑物外架体上安装喷淋系统,当扬尘超标后,再启动喷淋设备进行抑制;④在建筑工地的某处设置扬尘监测传感器,将喷淋系统安装在塔吊上,当扬尘监测超标后,启动喷淋设备抑制扬尘;⑤人工驾驶车辆,车辆上装载雾炮,沿规定场所工作。
上述所有方法均存在不能做到实时动态监测扬尘,只能监测局部扬尘,当另一区域产生扬尘时并不能检测到位,再者,由于建筑施工现场是动态布局,场地、建筑、塔吊会随着工程进度每日变化,设置的喷淋系统不易变化,故抑制扬尘效果均达不到要求。第五种人工驾驶车辆,成本过高,我司每年需支付人工工资和其它费用一年达800万元,一般工程按照2年工期就达1600万元。
1.2 施工现场动态巡察
传统的方法是,项目管理人员到现场巡查,若发现现场有不符合惯例规定的现象,进行处置。此存在的弊端:一是要求现场配备足够的管理人员;二是当项目领导班子成员外出则无法得知现场动态;三是受人的业务能力和主观因素的影响,管理效果难以确定。
综上所述,研发一种“建筑工地动态巡察与扬尘测控机器人”,实现自动巡察施工现场动态,并实时记录、储存、传输信息、计算机和手机终端浏览(远、近程浏览),项目领导班子成员根据浏览巡视施工现场动态,对现场值班人员发出指令,由现场值班人员通过无线广播提示各种注意事项或发出禁令,实现实时自动巡检施工现场扬尘指标,并自动启动动力系统和扬尘抑制设备工作,再机器人在无人控制下行驶工作,就解决了上述问题。
2 综合利用技术和设计研发概况
为实现上述目的,本设计研发的技术方案是综合利用通讯、电子、互联网、物联网、卫星遥感、激光测距、雷达测距、卫星定位与惯性导航组合、计算机、机械制造等技术,通过设计制造机器人构造及装置、硬件电路集成、嵌入式软件开发,实现智能工作。
3 主要组成部分、基本特征和实现方法
3.1 主要组成部分
建筑工地动态巡察与扬尘测控机器人主要组成部分有:①机器人主体结构、②行走驱动及配电系统、③行走照明与指示系统、④机器人安全与防护构造、⑤行走和转向状态测量及转向控制系统、⑥行走制动控制系统、⑦行走加减速控制系统、⑧行走障碍物测距与避障系统(雷达测距传感、超声波测距传感)、⑨行走定位与测控系统(卫星定位与惯性导航)、⑩影像采集传输储存浏览系统、⑪管理指令系统、⑫扬尘监测与抑制系统、⑬电力电源、⑭总控系统。如三维示意图(图1)所示。
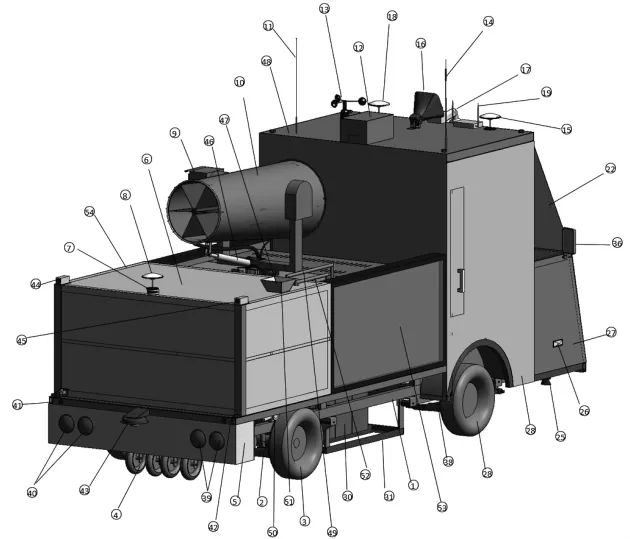
图1 三维示意图
3.2 机器人主要组成部分的构成、基本特征和实现方法
3.2.1 机器人主体结构内容、基本特征及实现方法
①机器人主体结构
机器人主体结构有:承载底盘、设备承台、控制设备室、精密仪器安装平台、强(弱)电配电柜架、控制主机柜架、可调电瓶吊架、及控制设备室;承载底盘、设备承台、控制设备室、精密仪器安装平台、强(弱)电配电柜架、控制主机柜架、可调电瓶吊架、控制设备室的基本特征如图2所示,实现方法是采用钢材等级为Q325的60×40、40×30、30×30mm的标准方管焊接而成。
②行走驱动及其配电系统
行走驱动及其配电系统有:驱动电机、差速器、主动轮轴及减震总成、转向轮轴与转向机构、减震总成、空载悬轮总成、行走驱动配电线路7个部分组成,其基本特征如图3、4、5所示,实现方法是委托加工制作总成、组装而成。
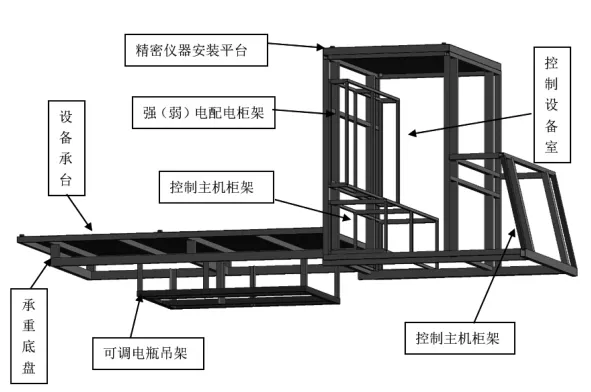
图2 三维示意图
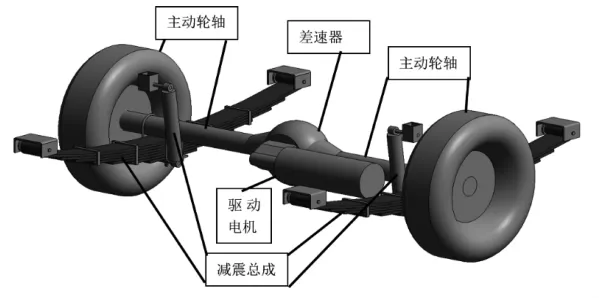
图3 驱动电机、差速器、主动轮轴及减震总成三维图

图4 转向轮轴与转向机构、减震总成三维示意图
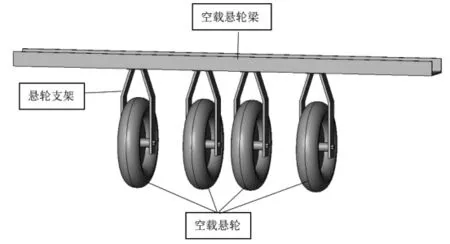
图5 空载悬轮总成三维示意图
③行走照明与指示系统有:行走照明设备及电路、转向指示照明设备及电路、LED显示器及其固定装置、LED显示电路。
基本特征如图1~4所示,主要实现方法是:设计电路图基地安装。
④机器人安全与防护构造有:设备间防护罩、前挡玻璃罩、侧翼护板、雷达测速传感器支架及防护罩、超声波测距传感器防护罩、前保护罩、后保护罩、电瓶保护罩、行走控制电器配电箱、扬尘监测传感器护罩。基本特征如图1~4所示,主要实现方法是:设计图纸、基地制作安装。
⑤转向状态测量及转向控制系统有:转向电机及传动总成、转向位移传感器和支架及传动总成、行走转向状态测量与转向控制系统供电和信息传输电路。基本特征如图1~5所示,主要实现方法是:设计图纸、基地制作安装。
⑥行走制动控制系统有:电动制动推拉杆及其传动机构总成、液压泵及油路、行走制动总成、控制电路及信息传输电路。基本特征如图1~5所示,主要实现方法是:设计图纸、基地制作安装。
⑦行走加减速控制系统有:加速器和电动推拉杆及其传动机构总成、转速传感器及其支架、供电和信息传输线路。基本特征如图1~5所示,主要实现方法是:设计图纸、硬件安装、编写软件。
⑧行走障碍物测距与避障系统有:雷达测距传感器及其支架、超声波测距传感器及其支架、供电和信息传输线路。基本特征如图1~5所示,主要实现方法是:设计图纸、硬件安装、编写软件。
⑨行走定位与测控系统有:卫星定位与惯性导航设备总成、卫星信息接收器、供电和信息传输线路。采用北斗定位与惯性导航系统设备,并根据接口协议编写控制软件。
⑩影像采集传输储存浏览系统有:网络摄像机及其固定装置、信息传输设备、嵌入式计算机、智能手机等,通过硬件集成、4G网络和计算机来实现。
⑪管理指令系统有:音频发送电台、发射天线、无线电接收机、功放机、麦克风及扬声器、供电和信息传输线路。通过硬件集成、计算机和发射电台来实现。
⑫扬尘监测与抑制系统有:扬尘监测传感器、扬尘监测指标显示器、扬尘抑制总成、供电和信息传输线路。通过系统设计、硬件集成和编写控制软件实现。
⑬电力电源有:充电蓄电池、燃油发电机、高压变配电及电箱、低压变配电及电箱。通过系统设计、硬件集成实现。
⑭总控系统有:控制主机、嵌入式计算机、供电和信息传输线路。实现方法通过硬件集成和编写控制软件来实现。
4 软件设计
4.1 软件总体设计
4.1.1 需求概括
本系统旨在设计一套嵌入式软件系统,实现机器人人工操作转向自动化控制。主要功能模块分为加减速自动化控制模块、制动自动化控制模块、转向自动化控制模块、前进后退自动化控制模块。
4.1.2 运行环境
①硬件环境。开发使用ST公司的STM32F429开发板,开发用PC机为惠普笔记本,运行环境为STM32F429芯片,使用CPU为ARM32-bit CortexTM-M4 CPU附带FPU,主频为180M。需同时搭载本项目专用机器人硬件框架,使用本项目专用外设配件。
②软件环境。软件需安装STM32F4xx_StdPeriph_Driver和STM32F429I-Discovery依赖库,使用STM32 F429开发板,并需要保证2M的片上存储空间。
4.1.3 总体结构
本软件系统总体设计框架如图6所示。

图6 软件系统设计框架图
本软件操作系统基于STM32F4XX系列代码库搭建,通过操作库函数API实现硬件操作接口调用,从而实现模块硬件的自动控制,同时与扬尘测控系统、动态巡查系统、导航系统同步通信,根据导航系统或者用户接口输入信息,控制机器人完成对应的功能。
4.1.4 功能模块简述
本软件的模块逻辑框架图如图7所示,主要分为5个模块:①主控MCU模块,由一块STM32F429为主控芯片,主要实现与导航模块的通信,以及底层4个控制模块的硬件控制;②转向自动控制模块,主要通过硬件信号传输,接收来自主控MCU的控制信息实现转向系统的自动化控制,并将实时转向角度通过硬件信号反馈给主控MCU;③加减速自动控制模块,接收来自MCU的控制信息实现机器人加速和减速系统的自动化控制,同时将实时速度信息反馈给MCU;④制动自动控制模块,接收MCU的控制信息实现机器人制动系统的自动化控制;⑤前进后退自动控制模块,接收MCU的控制信息实现机器人前进和后退切换系统的自动化控制。
4.2 接口设计
4.2.1 用户接口
本软件系统通过硬件通信接口打印实时信息到OLED屏幕上,也可以通过硬件串口查看系统运行信息。用户可以接入导航系统,通过导航系统实现机器人的自动行走,也可以通过串行接口直接使用串行通信协议,直接对机器人的行进进行控制。
其余部分通信协议将在第四部分软件功能描述中详细列出。串口通信物理参数如下:
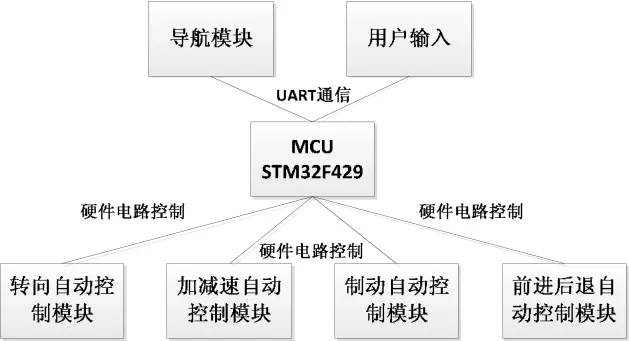
图7 模块逻辑关系图
波特率:9600 bit/s;数据位:8 bit;停止位:1 bit;奇偶校验位:无
4.3 内部接口
本软件系统使用的内部接口主要为STM32F4XX系列函数库,具体使用到的有I2C外设库、时钟库、串口通信库、IO库、DAC库、ADC库、内部中断库、外部中断库、SYSTEM库、FLASH库。
5 软件功能设计描述
5.1 通讯模块流程图和详细描述
本系统使用的用户输入方式为串行结构通信,具体通讯协议和物理参数已在第三章和第四章后面小节中详细介绍。本节主要详细介绍通讯模块的详细算法流程,具体算法流程如图8所示。
本模块首先初始化对应的硬件通讯接口,然后开启开启串口接收中断。当有串口信息发送过来时,串口接收标志位会发生改变,并进入串口中断,本模块对收到的信息都会做信息存储,等待一次接收完毕之后,对接收到的信息进行校验。校验方式为从起始码开始,将收到的每一字节数据依次累加至数据域最后一字节,然后将累加值和校验位两字节数据比对数值,数值相同即为成功,不同即为失败。若校验失败,就将收到的这组数据丢弃;若成功,便根据对应通信协议完成相应功能。
本软件模块使用的到的主要支撑库函数为USART_Init、USART_Cmd、USART_IRQHandler、USART_SendData。
5.2 加减速装置自动化控制功能流程图和详细描述
本系统所使用的底层行走控制装置为柯蒂斯牵引电机控制器,STM32F429芯片通过电压信号传输至柯蒂斯控制器控制机器人行进速度大小。具体流程如图10所示。
本算法首先对需要使用的硬件接口进行初始化,然后开始根据接收到导航系统的信息,修改速度设定值。系统通过加装的速度编码器,如图9所示。
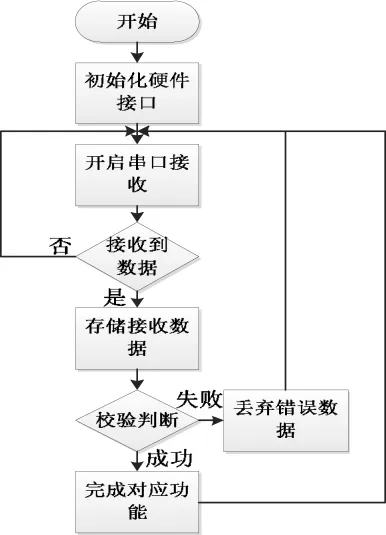
图8 通讯模块算法框图
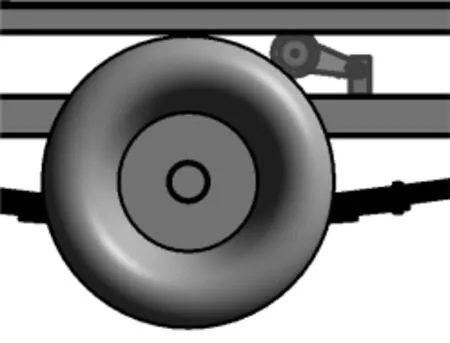
图9 速度编码器示意图
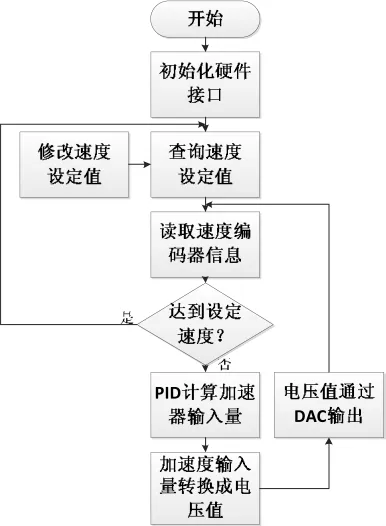
图10 速度编码器设计图
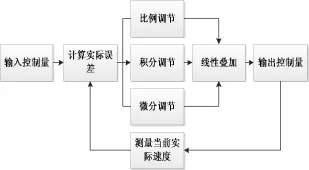
图11 PID算法框图
实时监测机器人行驶轮速,当发现实际轮速和设定速度差值大于5%时,便通过PID算法对速度输入控制量进行调整,具体PID算法流程图如图11所示。并将速度输入量转化为电压量,通过DAC输出至牵引电机控制器,改变机器人行进速度。
本软件模块使用的到的主要支撑库函数为DAC_Init、DAC_Cmd、DAC_SetChannel1Data。制动装置自动化控制功能流程图和详细描述本系统的制动部分主要依赖一个制动电机拉动制动踏板完成。具体结构如图12所示。
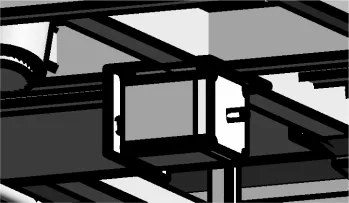
图12 步进电机设计图
本系统的制动装置自动化控制功能具体流程图如图13所示。首先初始化硬件接口,然后开始根据接收到导航系统的信息,修改制动设定值。当读取到需要制动时,本系统先修改速度设定值,将速度设定为0,然后输出A路PWM信号控制电机正传,带动踏板踩下,整个过程需要3S完成。再关闭A路输出,输出B路PWM信号控制电机反转,使踏板松开,整个过程需要3S完成,从而实现制动系统的自动化控制。PWM信号由定时器TIM3产生,通过初始化定时器参数,设定分频系数和占空比,A路和B路PWM信号的频率都为1KHz,占空比50%。
本软件模块所用到的支撑库函数接口主要有DAC_Init、DAC_Cmd、DAC_SetChannel1Data、TIM_TimeBaseInit、TIM_OC1Init、TIM_OC2Init、TIM_OC3Init、TIM_OC4Init、TIM_SetCompare1、TIM_SetCompare2、TIM_SetCompare3、TIM_SetCompare4。
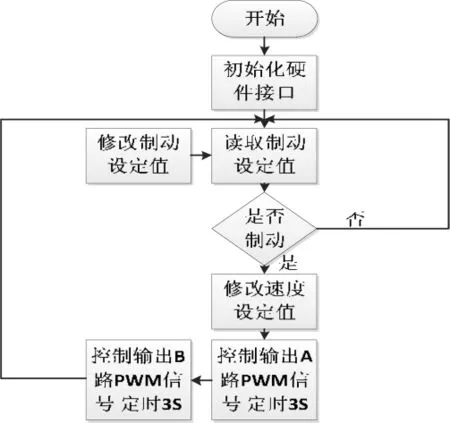
图13 制动装置自动化控制算法流程图
本软件模块和导航模块的通信协议,导航模块发送给STM32F429的控制指令为发送码,STM32F429会对接收到的控制指令码原码回传,表示已接收。
5.3 转向装置自动化控制功能描述
本软件模块具体流程图15,首先初始化硬件接口,然后开始根据接收到导航系统的信息,修改制动设定值。系统实时读取位移传感器数据,并根据如图14所示的对应关系,计算当前角度值。通过当前角度值和设定角度值做差,得到当前角度偏差量,若大于±5%,则计算角度修正方向和角度,并根据方向选择当前PWM输出通道,A路通道正转,B路通道反转;根据角度大小计算PWM信号占空比,角度越小占空比越小,调整速度越小,反之亦然。然后重新测量当前角度值,直到角度偏差值小于±5%的阈值。
本模块所用到的支撑库函数接口主要有TIM_TimeBaseInit、TIM_OC1Init、TIM_OC2Init、TIM_OC3Init、TIM_OC4Init、TIM_SetCompare1、TIM_SetCompare2、TIM_SetCompare3、TIM_SetCompare4。导航模块发送给STM32F429的控制指令为发送码,STM32F429会对接收到的控制指令码原码回传,表示已接收。
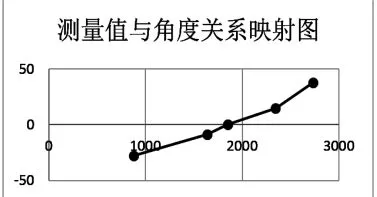
图14 传感器测量值和角度映射关系图
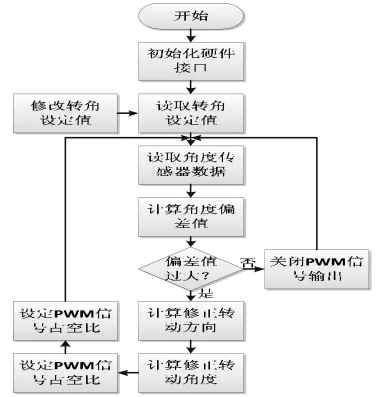
图15 转向装置自动化控制算法流程图
5.4 前进后退装置自动化控制功能流程图和详细描述
本系统的前进后退装置是通过STM32F429主控板输出两路控制信号控制电子换相器,从而控制机器人前进与后退之间相互切换。
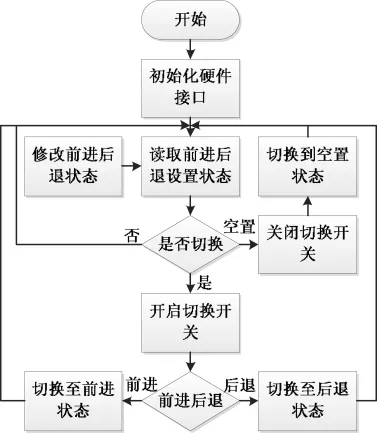
图16 前进后退装置自动化控制算法流程图
本软件模块的具体流程如图16所示。首先初始化硬件接口,然后开始根据接收到导航系统的信息,修改前进后退状态。当未收到切换指令时,不做处理;当收到空置指令时,调用IO口控制函数,关闭切换开关,切换至空置状态;当收到切换指令时,调用IO口控制函数开启切换开关,开启切换开关之后根据指令调用IO控制函数切换至前进状态或者后退状态。等待下一次切换指令到来。
本软件模块所用到的支撑库函数接口主要有GPIO_Init、digitalHi、digitalLo。
本软件模块和导航模块的通信协议为导航模块发送给STM32F429的控制指令为发送码,STM32F429会对接收到的控制指令码原码回传,表示已接收。
5.5 出错处理
当机器人出错,或者行驶偏离用户和导航系统设定时,用户可以使用远程电子遥控开关关闭系统的自动控制功能,机器人会直接切换至手动控制模式,以便用户处理紧急状况。
6 结束语
综合利用各种先进技术,通过创新设计与制造机器人实现智能工作,是我国新时期科技兴国的战略举措之一,我司通过此项目研发和应用,实现了建筑业逐渐从低附加值产品向高附加值产品转变,逐渐从劳动密集型向智能管理型转变,具有广阔的应用前景和深远意义。
