基于CHL-DS-01工作站的工业机器人码垛教学案例
2018-10-24王栋
王 栋
(苏州高等职业技术学校,江苏苏州215009)
1 概述
1.1 工业机器人技术专业设置背景
在“中国制造2025”提出及中国制造业加速转型(“机器换人”)的背景下,近年来从高校到职业院校纷纷根据企业需求和当地制造业的特点,进行专业设置调整,与工业机器人技术相关的专业或专业方向如雨后春笋般出现。笔者所在的苏州高等职业技术学校于2015年在江苏省同类学校中率先开设了工业机器人技术专业,近年来通过不断探索人才培养方案和课程体系,稳步推进专业建设。
1.2 “工业机器人示教与编程”课程教学
工业机器人示教与编程”是工业机器人技术专业的一门核心课程,主要学习内容是:工业机器人的基础操作与应用,掌握示教器的使用与典型的示教编程案例。本文将以该课程中的一个项目为案例来探讨课程的教学内容和方法。
1.3 机器人技术应用技能大赛
全国职业院校技能大赛是教育部每年定期举办的一项比赛,它的举办促进了各校的专业建设和师生培养。2017年大赛新增机器人技术应用项目,该项目基于北京华航唯实机器人科技有限公司生产的CHL-DS-01工业机器人异形芯片插件工作站,以ABB IRB120工业机器人为载体,通过示教编程和离线编程的方式实现工业机器人涂胶、码垛、分拣工艺。将大赛资源转化到教学中去一直是举办大赛的目标之一,因此在“工业机器人示教与编程”课程中,笔者便应用大赛设备为教学平台,以工业机器人涂胶、码垛为主要案例进行教学,下面就以码垛为案例介绍教学内容。
2 准备知识
2.1 码垛工艺介绍
码垛是工业机器人实际生产中的一种典型应用,码垛工艺是指:通过对垛的摆放位置进行简单确认就能实现所有垛的整齐摆放。这里的“垛”一般是指工业上生产的某种工件或物料。所谓机器人码垛,我们可以理解为通过机器人代替人工实现重复性的物料搬运工作,并且每个物料的位置都是确定而不是随机的。
2.2 码垛工艺要求
本项目教学基于大赛设备CHL-DS-01,该工作站上安装了一个用于取垛的码垛架(图1)以及一个用于堆垛的码垛台(图2),配备了用于机器人抓取码垛块的夹爪工具。机器人通过安装夹爪工具,可实现自动从码垛架取垛并在码垛台上堆垛。
工业机器人码垛的具体步骤如下:
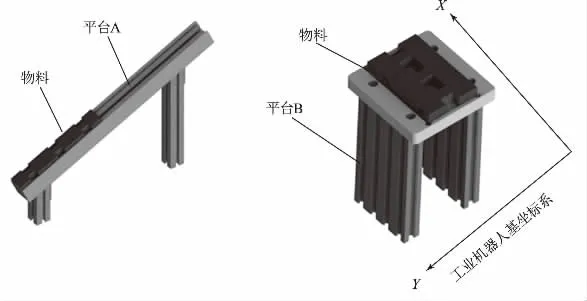
图1 码垛架
图2 码垛台
(1)工业机器人运行到工具架自动安装夹爪工具。
(2)工业机器人运行到码垛架抓取码垛块。注意:机器人应从码垛架底部抓取工件,当机器人抓走一个工件时,下一个工件会自动滑落到底部,因而每次抓取码垛块的位置是相同的,这就减少了机器人示教次数。
(3)工业机器人运行到码垛台根据示教的位置放置码垛块。
(4)工业机器人运行到工具架放回夹爪工具,然后回原点。
3 码垛示教与编程
CHL-DS-01工作站共有6个码垛块,码垛的形式可以多种多样,教学中可让学生尝试多种码垛形式。下面以单层三花垛(图3)为例介绍码垛的示教编程。
3.1 新建程序数据
首先建立本任务所需的robtarget类型数据(点位置),为下一步示教做准备。本任务的点位置包括:1个夹爪工具位置,1个取垛位置,3个放垛位置,由于后面4个位置在码垛过程中会反复用到,因此建立一个一维数组,将这4个位置都存在该数组中。
打开机器人示教器,点击程序数据,选择robtarget,点击“显示数据”,点击“新建”建立一个一维数组,数组名为“dian”,维数选择1,数组大小设为4。
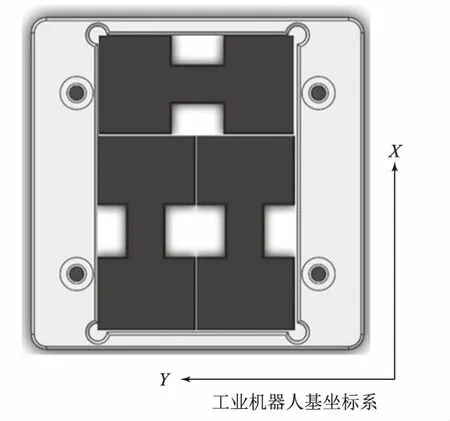
图3 三花垛(单层)
3.2 机器人示教
示教一般采用机器人手动操纵模式完成,要求学生必须严格按照要求完成每一个点的示教工作,避免误差,以免调试时发生机器人与工作站的碰撞。
首先示教夹爪工具位置(示教器中设为“jz”):通过手动操纵模式,控制机器人到达夹爪工具所在位置,在示教器中选择“修改位置”确定该点位置。
然后示教数组dian里面的4个点位置(1个取垛和3个放垛位置):点击数组dian,可以看到4个点数据初始值是一样的。手动操纵机器人,控制机器人到达码垛架底部的取垛位置,选择数组第一个数据{1}并点击“修改位置”确定dian{1}为取垛位置;然后继续手动操纵机器人确定3个放垛位置,并分别通过“修改位置”存入dian{2}、dian{3}和dian{4}。
3.3 机器人编程
打开示教器,新建例行程序maduo,然后按照码垛工艺顺序编写RAPID程序。
(1)安装夹爪工具程序。
添加MoveAbsJ指令使机器人回原点(命名为home),然后利用MoveJ、MoveL等运动指令编写程序完成以下步骤:利用Offs偏移功能使机器人到达夹爪工具上方,再降低速度到达夹爪位置,等待0.5 s(WaitTime 0.5)后复位快换工具信号(Reset HandChange_Start)安装夹爪工具,再等待0.5 s后上升到过渡位置。
(2)单层三花垛码垛程序。
单层三花垛共需码垛三次,可使用循环指令(FOR或WHILE)实现,首先设一个计数变量m,初值为1;然后利用FOR指令编写取、放垛程序,指定循环计数值为1~3即可实现3次循环。循环程序中将取垛位置设为dian{1},放垛的位置设为dian{m+1}(当m=1,放垛位置是dian{2};当m=2,放垛位置是dian{3};当m=3,放垛位置是dian{4})。
其中放垛程序如下:
ConfJOn;!关节运动的轴配置控制,使机器人避开奇异点或不可达位置
MoveJ Offs(dian{m+1},0,0,15),v500,fine,tool0;!到达码垛位置过渡点
MoveL dian{m+1},v50,fine,tool0;!到达码垛位置
WaitTime 0.5;
Reset Grip;!夹爪松开放置码垛块
WaitTime 0.5;
MoveL Offs(dian{m+1},0,0,20),v500,z50,tool0; !回到码垛位置过渡点
ConfJOn;
(3)放回夹爪工具程序。
与安装夹爪工具程序步骤相反,首先利用偏移功能到达夹爪工具位置上方,再降低速度到达夹爪位置,等待0.5 s后置位快换工具信号(Set HandChange_Start)松开夹爪工具,再等待0.5 s后上升到夹爪工具过渡点,最后机器人回原点结束任务。
3.4 机器人调试
程序编写完必须通过调试来验证例行程序的正确性,从安全考虑,可以先单步调试再连续运行调试。未经教师允许,学生不得启动自动模式调试机器人。
(1)单步调试。
在示教器上单击“调试”,选择“PP移至例行程序”,选择单层三花垛程序,按下示教器使能按钮,再按下单步调试前进按钮,按步观察机器人运行情况。如调试无误则可松开使能按钮准备连续运行程序,如机器人出现停顿并报错务必及时解决问题后重新调试。
(2)连续运行调试。
按下使能按钮后再按下连续运行按钮,观察机器人在手动限速模式下单层三花垛任务完成情况,确认无误后结束调试。
4 结语
本文以单层三花垛为例,介绍“工业机器人示教与编程”课程中一个任务的教学内容。机器人程序中应用了数组和FOR指令以简化程序,实际生产中码垛工艺会更加复杂,例如码垛的层数会更多,码垛的姿态会不同,因此,课后应引导学生进一步优化机器人码垛程序。学生通过机器人码垛的示教编程学习,可以掌握RAPID程序的基本指令及工业机器人应用的基本操作流程,为掌握更全面的工业机器人技术奠定基础;通过将大赛设备引入教学,也实现了大赛资源的及时转化,使大赛服务于教学。
