基于无人机和差分GPS的舰载雷达动态标校方法
2018-10-23季勤超姚申茂杨利斌贺林波
季勤超 姚申茂 杨利斌 贺林波
(1.海军航空工程学院兵器科学与技术系 烟台 264001)(2.海军军械装备局 北京 100080)
1 引言
舰载雷达用于搜索和跟踪空中目标,是舰船作战系统防空反导最重要的信号源之一,其探测精度直接关系到武器系统的打击精度,影响着舰船的作战效能和生存能力[1]。在舰船交付前,船厂对舰载雷达进行统一的标校,以保证雷达的探测精度。但随着舰船服役时间的推移,雷达的误差会发生漂移[2~3]。因此,雷达在实际使用和执行重要任务前必须对其进行标校。
传统的标校方法有很多,但它们都有明显的不足之处:文献[4]介绍了基于标校塔的标校方法,但标校塔建设成本大、资源稀少、机动性差,标校组织实施时不方便;文献[5]介绍了基于星体测量的雷达标校方法,但其受舰艇摇摆、天气及时间的影响严重;文献[6~7]提出了基于ADS-B数据进行雷达标校的方法,但ADS-B系统提供的仰角真值与雷达测量值时间对准困难,标定精度差;文献[8~9]介绍了应用差分GPS技术进行标校的方法,但没有考虑舰船姿态对标校精度的影响。而且,传统的雷达标校误差数据一般采用静态数据处理方法,把误差数据作为一个整体,计算其均值、方差等数据,缺乏对标校误差数据的分析和有效利用。本文提出一种基于无人机和差分GPS的舰载雷达标校方案,采用动态数据处理方法[10]对雷达标校数据进行处理,该方案能很好地获取目标位置信息,减少舰船姿态对雷达测量精度带来的影响,解决了传统标校方法和数据处理方法上存在的不足。
2 总体方案
2.1 系统设计
整个系统由标定源(无人机平台和目标模拟器)、雷达数据录取设备、GPS定位设备、无线数传设备、数据处理系统、载车及其它辅助设备组成。标校系统组成结构如图1所示。

图1 标校系统组成结构
标定源主要为雷达提供具有规定特征的目标反射信号,应该具有良好的机动性和可探测性[11],本系统标定源采用无人直升机悬挂龙伯球。采用无人直升机具有以下优点:通过无人机悬停和飞行能给舰载雷达提供静态和运动目标;无人机连续飞行时间长,标校时能确保获取到足够的目标真值和雷达测量数据;可根据需求实时修改无人机的飞行航路,改变无人机的飞行计划和降落点。龙伯球可以把各种大角度入射电磁波平行地发射回去,与三角反射体相比可产生较大的雷达截面和具有较宽的二次辐射方向覆盖角,加挂到无人直升机上后,基本不受无人机飞行航路限制,可保证雷达接收到龙伯球的有效反射信号。
雷达数据录取设备用于录取和记录雷达测得的目标位置信息,并通过无线数传设备实时发送到数据处理系统进行处理。
GPS定位设备为雷达和标定源提供高精度定位,提供GPS绝对时标,实时测量舰船的姿态角,并将测得的数据通过无线数传设备发送到数据处理系统。
无线数传设备将雷达数据录取设备和GPS定位设备测得的数据实时发送到数据处理系统。
数据处理系统的主要功能:接收无线数传设备发来的GPS数据和雷达录取数据;实时计算目标真值信息;实时测量舰船姿态信息;向飞控系统实时发送飞行航路控制命令;实时计算雷达标校结果。
载车用于承载无人直升机、GPS定位设备、无线数传设备和数据处理设备等设备,并将其运送至工作地点。
2.2 标校的基本流程
将舰船上的GPS天线C、GPS天线D、GPS天线E和无人直升机搭载的GPS天线B测得的数据,分别通过无线数传设备送往数据处理中心,与基准站GPS天线A获取的数据实时差分处理,得到GPS天线C、GPS天线D、GPS天线E和无人直升机的GPS坐标。通过GPS天线C、GPS天线D和GPS天线E测得的数据计算出舰船摇摆中心O点的大地直角坐标和舰船的姿态信息。通过坐标变换将无人直升机的GPS坐标变换到舰船甲板坐标系。根据舰船的设计安装资料,获取雷达天线在舰船甲板坐标系下的坐标值。求出无人直升机在雷达测量极坐标系下的坐标值,即目标真值。获取舰载雷达的测量数据和由雷达局部基准系统获取雷达对航母姿态的修正值,测量数据中排除局部基准的修正值,叠加由GPS获取的航母姿态参数得到修正后的测量值。对雷达的测量值和真值进行一定的处理,最终解算出雷达的系统误差。最后根据得到的系统误差对舰载雷达的各项指标进行校准,完成对舰载雷达的标校。标校基本流程如图2所示。

图2 标校基本流程图
3 关键技术
3.1 真值获取
舰载雷达标校工作的关键是如何精确获取目标的实时位置信息,即如何获取目标真值。本文采用差分GPS定位技术来实时获取无人直升机相对于舰载雷达的位置信息,其定位精度可达到厘米级,高于雷达精度的3倍以上。
由于无人直升机所悬挂的龙伯球和搭载的GPS天线B基本处于相同的空间位置,可直接从GPS接收机B和基准站GPS接收机A读取数据,差分后得到无人直升机的GPS坐标,再通过坐标变换得到无人直升机在舰船甲板坐标系下的坐标。通过舰船上的GPS天线C、GPS天线D和GPS天线E能实现舰船的精确定位,然后根据舰船的设计安装资料可直接获取雷达天线在舰船甲板坐标系下的位置信息。最后通过计算得到无人直升机在雷达测量极坐标系下的坐标值,即目标真值。
3.2 舰船姿态测量
舰船在海上航行时受海浪和海风影响产生的摇摆运动会影响舰载雷达的测量精度,因此标校过程中必须实时测量舰船的姿态。现有的姿态测量手段主要是通过惯导测量,但当舰船连续航行时间较长时惯导累积的误差较大[12]。本文采用差分GPS来测量舰船姿态以弥补惯导测量的不足。
如图1所示,O点为舰船摇摆中心,GPS天线D和GPS天线E沿舰船艏艉线放置,分别置于舰艉和舰艏,GPS天线C放置在舰船的左舷,使OC垂直于DE。天线D和天线E之间连线向量记为-→----,O点和天线C之间的连线向量记为-→-----→-----→----的长度和方向可以精确测量。

3.3 数据处理
3.3.1 坐标系统一
GPS设备获取的真值数据和雷达的测量数据是基于不同坐标系的,所以获取两种数据后首先要将它们统一到相同坐标系下。主要坐标变换如下:
1)大地地心坐标(B,L,H)转换到大地直角坐标(xe,ye,ze):
其中:N=a/1-e2sin2B为地球参考椭球体的卯酉圆曲率半径;e2=(a2-b2)/a2;a=6378136.49,b=6356755.00,e分别为地球参考椭球体的长半径、短半径和第一偏心率。
2)大地直角坐标(xe,ye,ze)转换到当地水平坐标(xl,yl,zl):

其中,(xe0,ye0,ze0)为航母摇摆中心的大地直角坐标,B0和L0分别为航母摇摆中心的纬度和经度。
3)当地水平坐标(xl,yl,zl)转换到甲板坐标(xd,yd,zd):

其中
其中,φ、θ、φ分别是舰船的横摇角、纵摇角、艏摇角。
4)雷达测量直角坐标(xs,ys,zs)转换到雷达测量极坐标(R,A,E):

3.3.2 数据同步及匹配
由于GPS设备和舰载雷达在传输数据上的速度是不同的,因此在系统误差标校前,还需要进行数据同步和数据匹配[13]。
数据同步主要是为保证试验期间目标真值与雷达测量之间时间的统一。时间同步技术可分为三类:基于发送者的同步模型;基于发送者和接受者交互的同步模型;基于接收者交互的同步模型。本文以GPS时间作为舰载雷达和GPS设备同步的时间基准[14~15]。
采样率是指数据获取的频率,舰载雷达的数据采样率和GPS设备的采样率是不一样的,并且在测量数据记录的过程中,可能会有某个点的数据没有记录到,所以在确定统一授时单元后还需要对采样信息进行数据匹配。本文采用常规的标量插值对距离参数进行重采样,采用矢量差值对角度参数进行重采样,以实现数据的采样率对齐。
3.3.3 误差分析
当雷达测量数据和GPS数据在坐标系、时间和采样率上都对齐后,计算雷达测量数据和GPS数据的一次差得到动态标校误差数据。雷达测量数据为(Ri,Ai,Ei),GPS数据为(),误差数据为,它们之间的关系为

舰载雷达的标校误差数据包含了粗大误差、随机误差和系统误差,获取误差数据后通过“剔野”消除其中的粗大误差,通过“去噪”对随机误差进行分离,最后得到系统误差,根据系统误差对雷达进行校准。
4 试验测试
标校过程中,无人机在舰船的右舷方向,由10km左右向舰船飞行,其飞行速度在135m/s~145m/s,高度在160m~200m之间,飞机的方位角在320°~360°之间,在8km处雷达能稳定地跟踪目标。对舰载雷达及GPS设备获取的数据进行坐标系、时间和采样率上对齐后,作差得到雷达标校的原始误差数据。图3和图4分别是标校误差数据中的方位角原始误差数据和俯仰角原始误差数据。
对得到的原始误差数据进行“剔野”“去噪”处理,消除原始误差里的粗大误差和随机误差,得到舰载雷达标校的系统误差。图5和图6分别为得到的方位角系统误差和俯仰角系统误差。
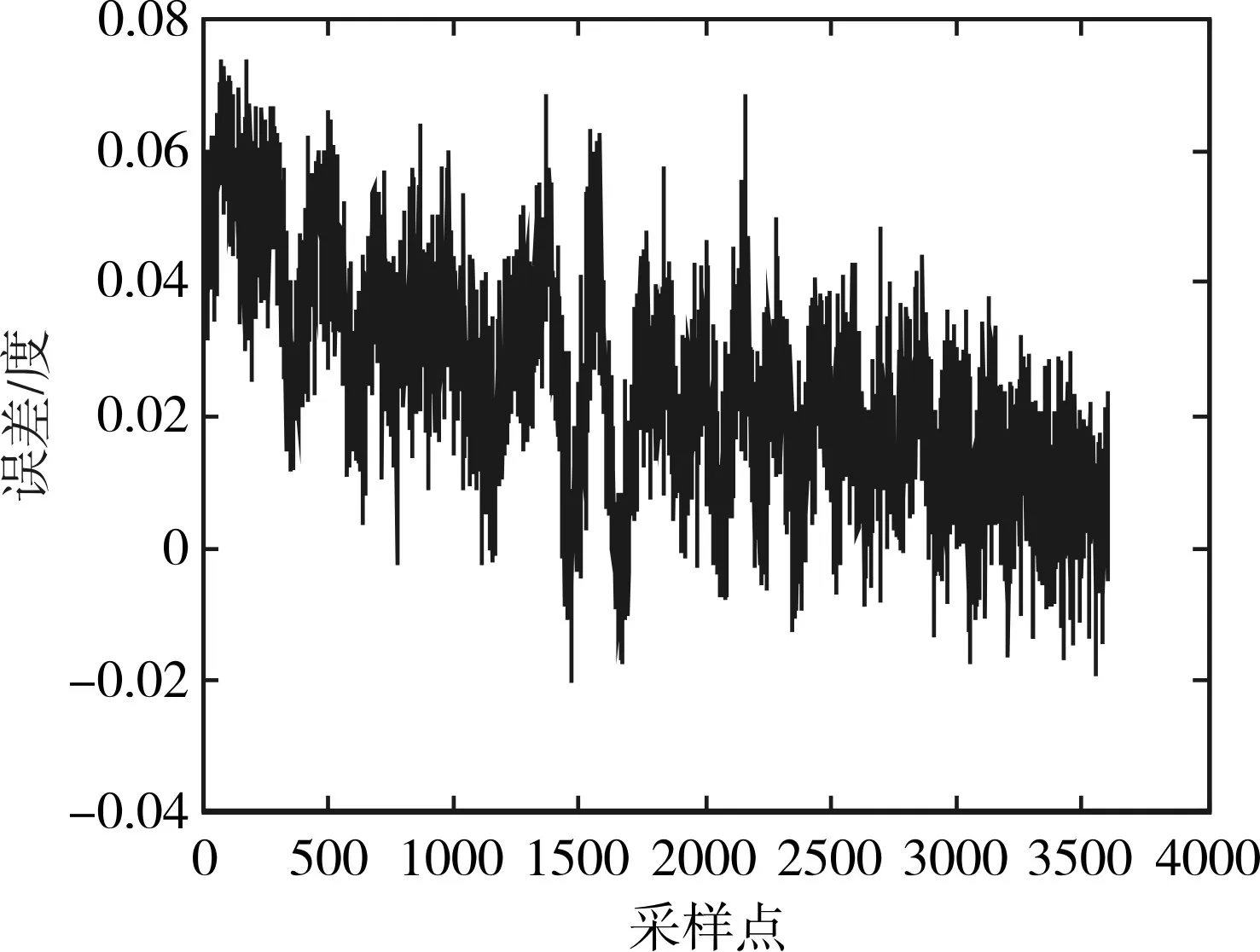
图3 方位角原始误差

图5 方位角系统误差

图6 俯仰角系统误差
得到雷达的系统误差后对雷达的系统误差进行分解,得到各子系统误差,然后将各子系统误差与误差模型进行特征对比,得到各子系统误差与雷达各误差源之间的对应关系,找到误差产生的源头,最后有针对性的对雷达进行校准。校准后重新测量得到雷达新的系统误差数据,对比校准前后的系统误差数据后发现雷达的系统误差明显减小,说明依据此方法能成功地完成对舰载雷达的标校。
5 结语
本文针对舰载雷达传统标校技术的不足,提出了一种基于无人机和差分GPS的舰载雷达标校方法,采用搭载GPS定位设备和龙伯球的无人直升机作为标定源,以差分定位获取目标真值和舰船姿态,同时用测得的舰船姿态修正雷达测量数据。文中对整个方案的系统组成和标校的基本流程进行了深入研究,对真值的获取、舰船姿态测量和数据处理等技术进行了全面分析。经试验证明,该方法标校精度高,通用性好,灵活度高,经济适用,实施条件宽松,对提高舰载雷达保障水平、降低保障成本具有重要的军事和经济效益。
