某直流电机积分分离式PID控制策略研究
2018-10-23赵雄飞刘泽周曲林伟郭岩松
赵雄飞 刘泽周 曲林伟 郭岩松 王 强
(1.海军装备部驻沈阳地区军事代表局 沈阳 110031)(2.大连海事大学船舶与海洋工程学院 大连 116026)(3.中国中船重工第七〇三研究所 哈尔滨 150078)(4.91998部队 旅顺 116041)(5.海军工程大学动力工程学院 武汉 430030)
1 引言
发电机在以高速、高精为特征的现代工业中逐步得到推广,相比于普通旋转电机,直线电机具有结构简单、噪声低、推力大、组合灵活等优点,但由于没有中间传动装置,使得参数摄动、负载变化等不确定因素的影响直接作用于电机,给系统控制带来一定的难度。传统PID控制具有输出稳定、易实现等优点而被一直沿用至今,在直流电机控制系统中速度环的作用是增强系统抗负载扰动的能力,抑制速度波动,提高系统的稳定性能。常规PID控制对系统输入的适应性不强,当有较大扰动时,系统易产生超调和振荡。
韩明文[1]提出了一种在速度环上用积分分离的PID控制器代替常规PID控制器的控制方法。孟祥萍[2]针对移动机器人在旋转角度控制时,普通PID控制器存在超调、波动和普通积分分离式PID存在响应速度慢的问题,采取对PID控制器的比例项和积分项同时进行控制的方法,并针对不同阶段误差采取参数自适应的控制,提高了系统的稳定性,同时又提高了系统的响应速度。李满[3]在分析两轮共轴小车物理模型的基础上,采用积分分离PID算法作为小车的最终控制方式,依据两轮共轴小车的物理模型建立较为精确的仿真模型,验证积分分离式PID算法控制的可行性。黄海波[4]针对传统PID理论不能适应无刷直流电机动态运行特性的缺点,提出将积分分离模糊控制与经典PID相结合,构成了无刷直流电机速度电流双闭环控制系统。陈尚国[5]为避免协同系统雷达方位超调,甚至震荡现象,设计了积分分离控制方法,当从动雷达方位与目标方位差值较大时,放弃积分手段,直接采用PD控制算法,当方位偏差量较小时采用普通PID控制算法,能够有效改善协同系统的稳定性,提高协同系统控制效率和精度。张墩利[6]为提高恒压供水设备的水压精度,采用积分分离PID算法实现水箱的恒压控制,实际测试表明,该控制系统运行稳定,调节精度高,鲁棒性好。龚敏[7]为实现精确航向控制,减小水下机器人(ROV)偏航角较大时产生的超调,利用Matlab-Simulink仿真建模,对ROV航向控制进行仿真实验,整定优化PID参数,具有较好的动态性能和稳态性能。吴廷强[8]针对温度控制系统采用传统PID控制方法易出现响应速度慢、超调量大、控制精度低等问题,提出了一种基于积分分离模糊PID控制的改进方法,具有响应速度更快、超调量更小和控制精度更高等优点。还有学者[9~12]在对电机控制系统提出了调节方法,并进行了参数优化。
在以上学者研究的基础上,针对改型直流电机适应性不强,当有较大扰动时,系统易产生超调和振荡的现象,设计了改型电机积分分离控制方法,使其稳定在其工作转速。
2 积分分离式控制原理
在普通PID控制中引入积分环节的目的,主要是为了消除静差,提高控制精度。但是过程的启动、结束或大幅增减设定时,短时间内系统输出有很大的偏差,会造成PID运算的积分积累,致使控制量超过执行机构可能允许的最大动作范围对应的极限控制量,引起系统较大的超调,甚至引起系统较大的振荡。
积分分离PID控制的设计思路是:当被控量与设定值偏差较大时,取消积分作用,以免由于积分作用使系统稳定性降低,超调量增大;当被控量接近给定值时,引入积分控制,以免消除静差,提高控制精度。其具体实现步骤如下:
1)根据实际情况,人为设定阈值ε>0;
2)当 | error(k)|>ε时,采用PD控制,可避免产生过大的超调,又使系统有较快的响应;
3)当 | error(k)|≤ε时,采用PID控制,以保证系统的控制精度。
积分分离控制算法可表示为
式中,T为采样时间,β为积分项的开关系数。

根据积分分离式PID控制算法,积分分离式PID控制算法程序框图,如图1所示。
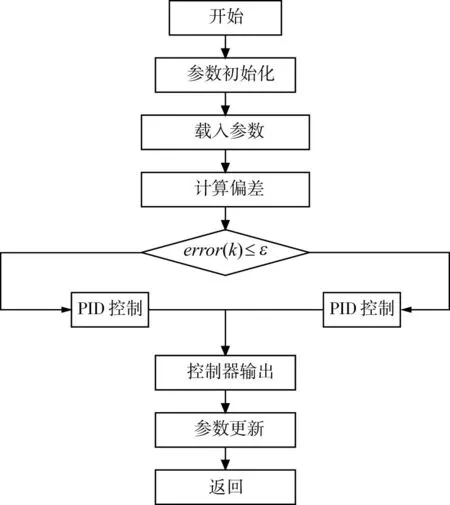
图1 积分分离式PID控制算法程序框图
3 某直流电机积分分离式控制仿真研究
采用积分分离式PID控制下列对象:

采样时间为20s,延迟时间为4个采样时间,即80s,被控对象离散化为

采用积分分离式PID控制进行阶跃响应,对积分分离式PID控制算法进行改进,采用分段积分分离方式,即根据误差绝对值的不同,采用不同的积分强度。仿真中指令信号为yd(k)=3000,控制器输出限制在[-2900,3100]。
首先采用普通PID控制,阶跃式跟踪结果如图2所示。
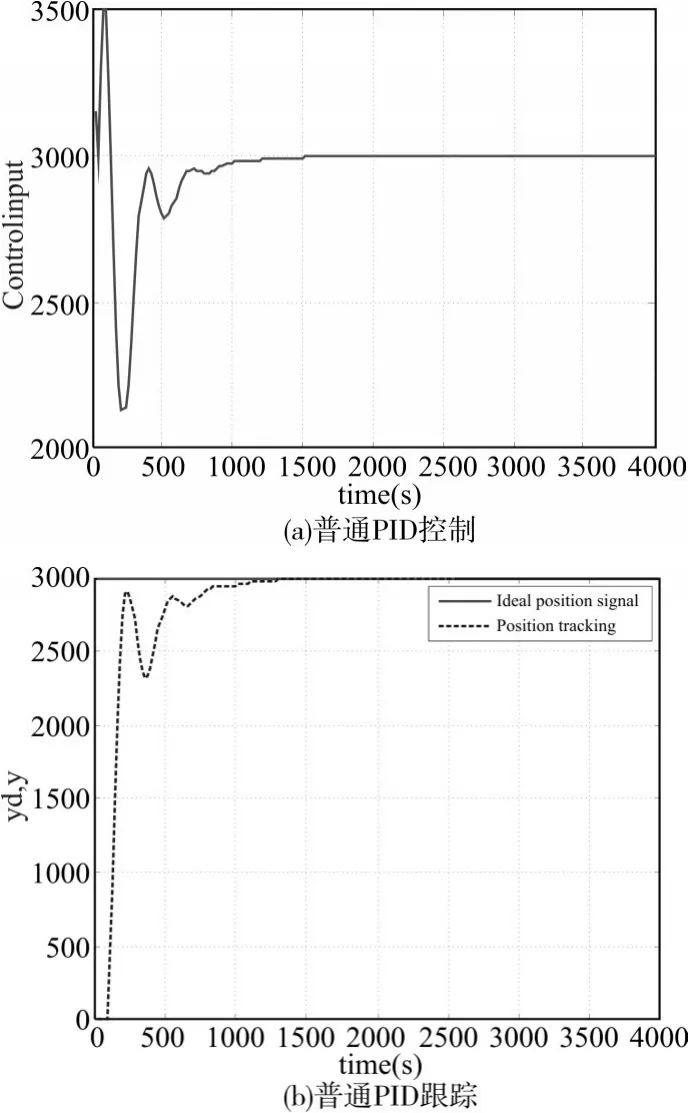
图2 普通PID控制及其跟踪
采用积分分离式控制方法对该系统进行控制及其跟踪,如图3所示。
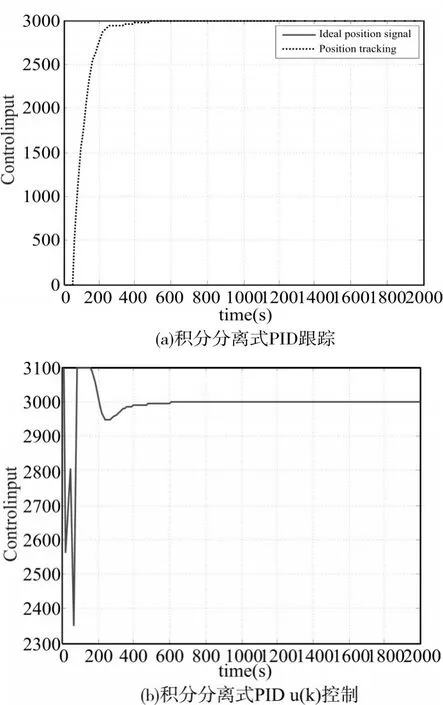
图3 积分分离式PID控制及其跟踪
从图2、3可以看出,该型直流电动机采用普通PID控制时,容易产生超调,会对设备造成冲击或损坏,而采用积分分离式控制方法对该系统进行控制不会产生超调,而是逐步的逼近设定参数,因此积分分离PID控制比普通PID控制更适合工程实践。
4 结语
积分分离式控制方法对该系统进行控制不会产生超调,而是逐步的逼近设定参数,适合该型直流电机工作实际。
