幅相误差对光控相控阵雷达二维波束扫描的影响研究
2018-10-23刘飞,张鸿
刘 飞,张 鸿
(中国船舶重工集团公司第七二三研究所,江苏 扬州225101)
0 引 言
随着军事高技术的发展,对作战空间及其信息的控制已成为赢得战争的关键,而对作战空间电磁态势的感知是制信息权的基础[1-2]。其中雷达作为态势感知最重要的手段,对信息战的胜负起着至关重要的作用。为了适应日益复杂的电磁战场,对雷达能观测目标的种类、测量的参数等都提出了许多新要求,并且还应具备探测隐身目标、低小慢目标,在强杂波、强干扰和硬打击条件下工作的能力[3-5]。
相控阵雷达技术为解决上述问题提供了很大的技术潜力,因而其发展受到国内外普遍的重视。目前,相控阵雷达技术[6-9]己广泛应用于几乎所有类型的军用雷达。尽管相控阵雷达技术具有众多的技术和战术性能优势,但是由于受到阵列孔径渡越时间的限制,只能工作在相对窄的信号带宽下,因而限制了其在复杂电磁环境中的应用,很难满足诸如目标识别以及成像等对宽带信号的需求。
而光控相控阵雷达[10-12]采用光电子技术,通过光延时方法来抵消孔径渡越时间,因此具有大瞬时带宽扫描工作的能力,并且随着光子集成技术的发展,也可以满足相控阵雷达对小型化和低功耗的发展需求。因此,光控相控阵雷达能够适应和满足现代战争对雷达全方位、高性能的发展要求,成为相控阵雷达发展的一个重要方向。本文针对光控相控阵雷达由于目前光器件研制水平带来的幅相不一致性,开展相关的研究。
1 光控相控阵雷达二维扫描的基本原理
设光控相控阵雷达二维阵列由M行和N列组成,总共M×N个单元,行间距和列间距分别为dx和dy。若波控指向方位角φ0,俯仰平面与Z轴夹角为θ0,其示意图如图1所示。
根据二维波束形成的原理[13],可以得到二维阵列的天线方向图为:

图1 二维阵列示意图


采用如表1所示的参数进行仿真。
图2为θ0=45°,φ0=0°时,传统基于移相扫描的不同频率下的天线方向图,由图可以看出,波束指向角随着频率的变化而变化,也即出现波束偏斜的现象,这说明基于移相扫描的相控阵的使用带宽有限,不能在宽带情况下使用。
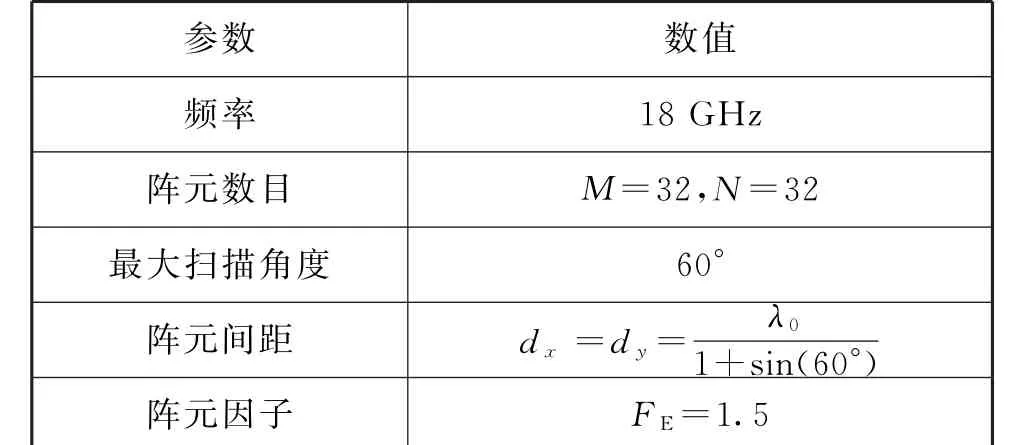
表1 仿真参数

图2 θ0=45°,ϕ0=0°时,基于移相扫描的不同频率天线方向图
图3 为θ0=45°,ϕ0=0°时,光控相控阵不同频率下的天线方向图,由图可以看出,波束指向角不随频率的变化而变化,因此不存在波束偏斜的现象,这说明基于光控扫描的阵列天线可以在宽带情况下使用。
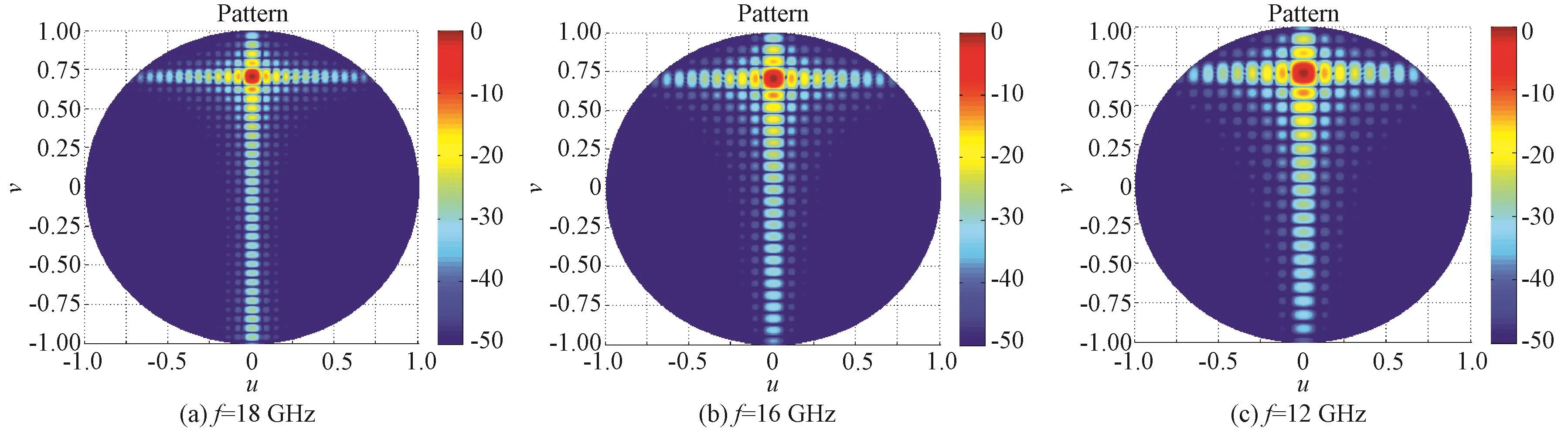
图3 θ0=45°,ϕ0=0°时,光控相控阵在不同频率下的天线方向图
2 光控相控阵雷达幅相误差的产生
光控相控阵雷达采用了光纤延时链路,其传输特性的幅度和相位频率特性并非是理想的,因此必然存在着幅度和相位误差带来的影响。总的来说这些误差可以分为两大类:幅相随机误差、延时量化误差。
2.1 随机幅相误差
随机幅相误差主要是由光控相控阵雷达各通道光链路幅相不一致带来的,包括各通道激光器、调制器、光波束形成网络、光耦合器和光探测器等器件的不一致性。一般来说,随机幅相误差可以用一个零均值的高斯分布来表示。由随机误差引起的平均副瓣电平可由下式进行计算[13]:

2.2 延时量化误差
在光控相控阵雷达中,光波束形成网络是其核心模块,目前光波束形成网络大都采用基于光开关对光路进行切换的方案[14-15],其结构形式如图4所示。它包括N个光开关和N个不同时延长度的光纤,从而构成具有2N个时延单位的N位的时延网络。图中光开关1,光开关2,…,光开关N,它们在波控信号控制下可以处于延时和不延时2种状态,通过所有开关不同延时状态的组合,可以实现0到2N-1△τ范围内的2N个延时,其延时跳变单位为△τ。显然,这种结构的光延时网络除了需要2×2光开关和延时光纤外,不需要多个激光器和探测器,所以结构简单,插损较小,且延时长度和时延跳变单位完全由延时光纤的时延长度值和开关个数决定,此外还易于集成。

图4 基于光开关切换的光波束形成网络
在实际使用中,光相控阵雷达一般采用子阵延时,但这种延时是离散的,因此会出现延时量化造成的副瓣抬高和指向偏斜,而且当延时位数过少或光学真延时(OTTD)的时延步长过大时,将使得相邻区域内的波束不可分辨。
3 光控相控阵雷达幅相误差的仿真分析
3.1 随机幅相误差的影响仿真分析
图5为基于光控阵列的天线在不同随机幅度误差下的误差分布和天线方向图,由图可以看出,随着幅度误差的增大,天线旁瓣天平逐渐升高。当幅度误差为±2 d B时,幅度误差对天线方向图的影响不大,此时,平均副瓣电平为-35 dB;当幅度误差增大到±5 d B时,平均副瓣电平为-25 d B;当幅度误差为±10 dB时,平均副瓣电平为-18 dB。
图6为基于光控阵列的天线在不同随机相位误差下的误差分布和天线方向图,由图可以看出,随相位误差的增大,天线旁瓣天平逐渐升高。当相位误差为±5°时,随机相位误差对天线方向图的影响不大,平均副瓣电平为-35 dB;当相位误差增大到±10°时,平均副瓣电平为-30 dB;当相位误差为±20°时,平均副瓣电平为-27 dB。
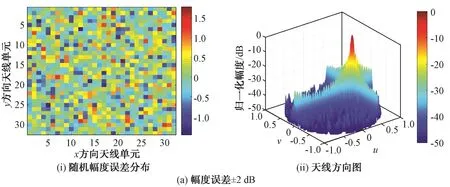
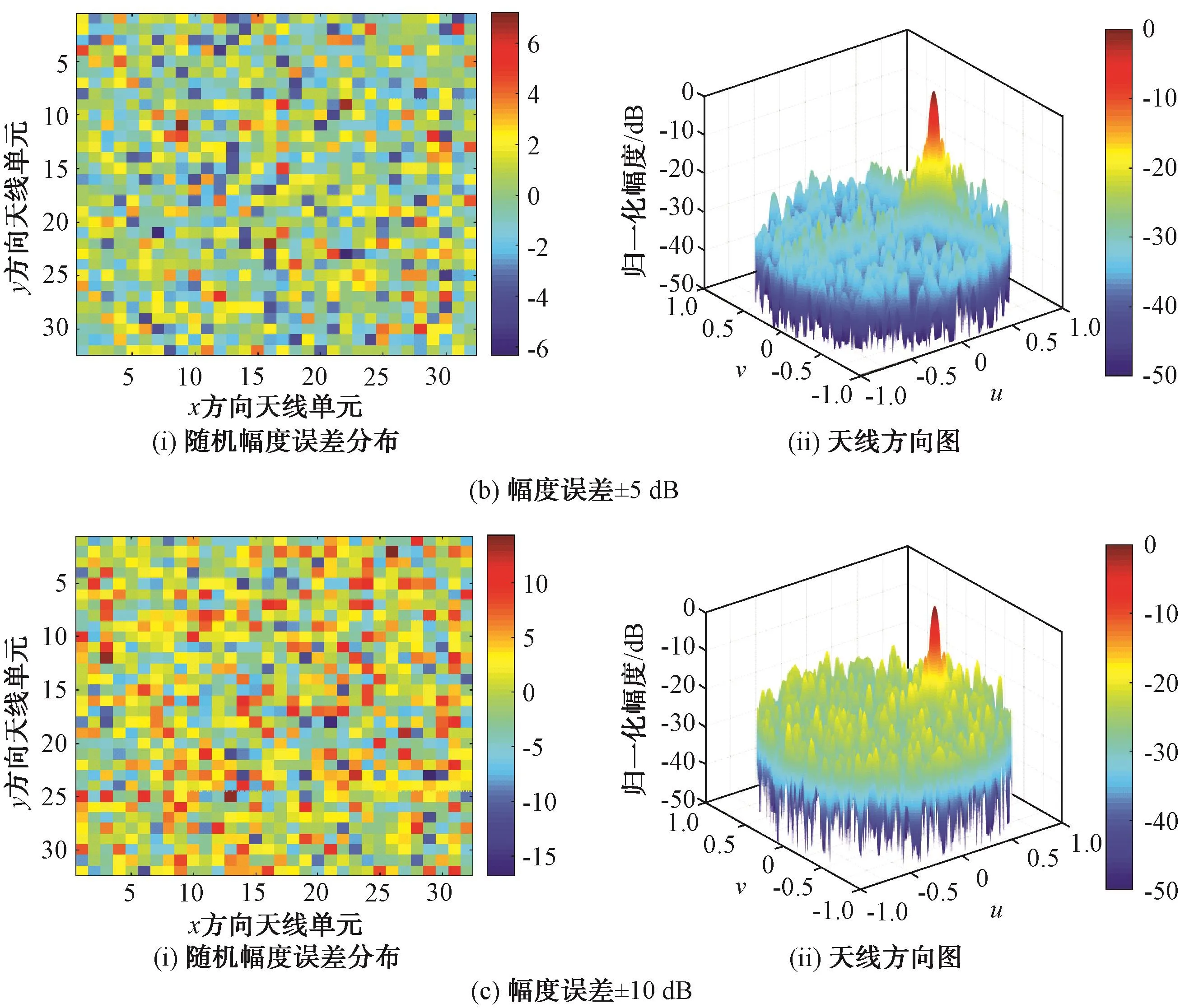
图5 基于光控阵列的不同随机幅度误差下的误差分布和天线方向图
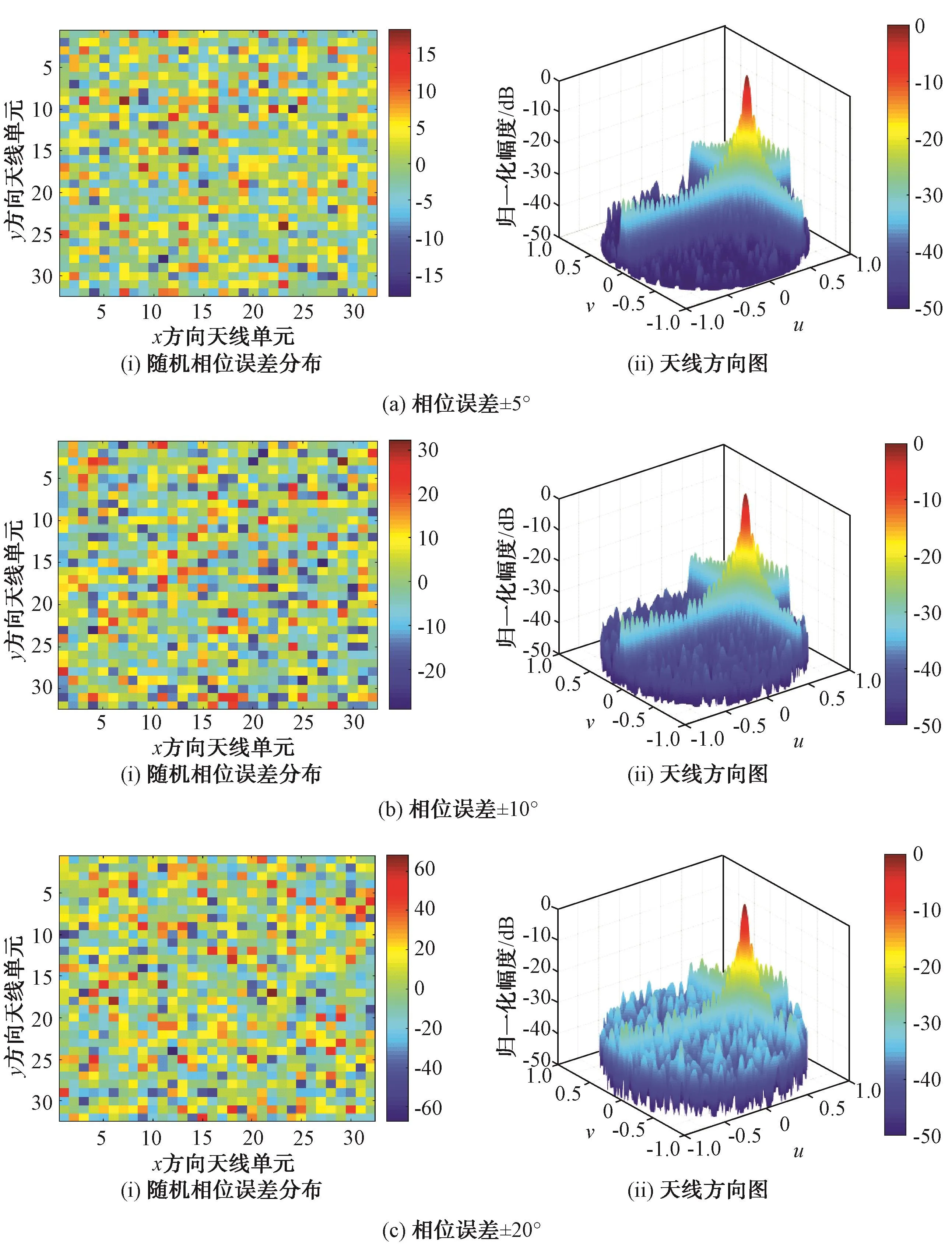
图6 基于光控阵列的不同随机相位误差下的误差分布和天线方向图
图7 为基于光控阵列的天线在不同幅相随机误差下的误差分布和天线方向图,由图可以看出,当幅度误差为±2 d B、相位误差为±5°时,幅相随机误差对天线方向图的影响不大;随着幅相误差的增大,天线旁瓣天平逐渐抬高,从而影响天线性能;当幅度误差为±10 dB,相位误差为±20°时,平均副瓣电平为-17 d B。

图7 基于光控阵列的不同随机幅相误差下的误差分布和天线方向图
因此,为了减小随机幅相误差的影响,必须对各通道激光器、调制器、光波束形成网络、光耦合器和光探测器等器件进行筛选,并在通道间引入幅相补偿模块,实时补偿幅相误差的影响。
3.2 延时量化误差的影响仿真分析
图8是基于光控扫描的阵列天线在延时量化位数为2 bit、4 bit、6 bit时的天线方向图。由图可以看出,相位量化误差越大,旁瓣越高;当量化位数为6位时,量化误差的影响基本可以忽略。
因此,在进行光控相控阵的设计时,必须综合考虑,选择合适的延时量化位数,从性能和成本进行折衷。
4 结束语
本文针对目前微波光子器件和延时量化带来光控相控阵雷达幅相误差,开展仿真研究。首先分析了光控相控阵雷达二维波束扫描的基本原理,然后对幅相误差产生的原因进行了分析研究,最后重点进行了仿真研究。本论文的研究可为光控相控阵雷达的设计提供一定的参考意义。

图8 基于光控扫描的不同延时量化位数下的天线方向图