对机载预警PD 雷达的航迹欺骗干扰技术研究
2018-10-23原伟,束坤,高晨
原 伟,束 坤,高 晨
(中国船舶重工集团公司第七二三研究所,江苏 扬州225101)
机载预警雷达普遍采用脉冲压缩技术、脉冲多普勒(PD)体制,具有很强的抗干扰性能。一般的压制式干扰和欺骗式干扰无法对其产生良好的干扰效果。航迹欺骗干扰技术是一种可以在距离、角度和速度3个维度上同时对雷达实施欺骗的新型综合欺骗干扰技术,比单纯的一维欺骗具有更高的模拟逼真度,是一种更高级的有源欺骗干扰技术,因此,可以用来作为对机载预警PD雷达进行干扰的一种有效措施。
1 航迹欺骗干扰技术
1.1 航迹欺骗干扰技术的基本原理
通常采用副瓣干扰的方法,当雷达副瓣接收到的干扰功率大于或等于主瓣接收到的回波功率时,雷达信号处理系统会把收到副瓣干扰瞬间的主瓣方位误认为是目标方位,从而实现方位欺骗[1]。干扰机对雷达副瓣信号进行实时侦收,并在加以延时、多普勒频移调制以及幅度调制后转发,使其在雷达接收端产生具有距离-方位-速度综合性欺骗干扰且雷达检测有效的假目标航迹点。这样对多个副瓣实施干扰,可最终在雷达显示屏上显示出与真实目标运动轨迹相似但方位、距离各不相同的多假目标航迹,从而形成多方位密集假目标航迹欺骗干扰。

图1 副瓣干扰示意图
1.2 航迹欺骗干扰的关键技术
航迹欺骗干扰的关键技术是对转发时延量的选取,方位欺骗和距离欺骗可分别通过方位转发时延和距离转发时延实现,而速度欺骗可通过多普勒频移来实现。
1.2.1 方位转发时延
假设雷达天线的主瓣在对准干扰机后,还需转过角度Δθ(即角度欺骗量)才能对准假目标航迹起始点所在方位(见图2说明),则干扰机产生上述角度欺骗的假目标所需的转发时延为:

式中:Vn为雷达天线的转速;0≤Δtθ≤Tθ,Tθ为雷达天线的扫描周期[2]。

图2 方位欺骗图示说明
假设模拟产生沿任意方位运动的假目标,取雷达天线的扫描周期Tθ为1个时间步长,即雷达天线每扫描1周,假目标航迹点更新一次。假设干扰机共产生n个假目标,产生每个假目标的起始航迹点所需的角度欺骗量分别为θ1,θ2,…,θi,…,θn,i=1,2,…,n,且后续每个航迹点相对于前一个航迹点的方位角变化量均为Δθω,则干扰机产生第i个假目标的第j个航迹点所需的方位转发时延为:

式中:i=1,2,…,n;j=1,2,…。
1.2.2 距离转发时延
设雷达发射脉冲信号的脉冲重复周期为Tr,雷达脉冲在雷达与干扰机间的传播时延为t干,干扰机到雷达的距离为R干,假目标起始航迹点到雷达的距离R假,干扰机产生上述距离欺骗的假目标所需的转发时延为ΔtR,则有[3]:


图3 航迹欺骗干扰的距离转发时延关系图
1.2.3 多普勒频移
假设由干扰机相对于雷达运动而产生的多普勒频移为fd,若要生成带有不同运动速度的假目标,则干扰机在转发回波信号时,一方面要抵消掉干扰机原有的多普勒频移fd,另一方面要注入新的多普勒频移fd′。设雷达发射信号频率为f0,干扰机回波信号频率为f回,干扰机转发信号频率为f转,则有:

式中:fd′=2vr/λ,vr为假目标相对于雷达的径向运动速度,λ为雷达工作波长。
1.2.4 距离-速度相关
对具有距离-速度二维检测能力的PD雷达来说,必须进行距离-速度相关处理,否则很容易被雷达识别为假目标。
目标的径向速度vr是目标距离R对时间t的导数,也是多普勒频移的函数。假设假目标在起始航迹点的径向速度为v0,径向加速度为a,则假目标径向移动ΔR距离需要的距离转发时延为:

对应t时刻假目标的多普勒频移为:

式中:f0为雷达信号载频。
则按照式(8)设定假目标的多普勒频移即可实现距离-速度相关。
1.2.5 航迹欺骗干扰的总时延
设干扰机产生每个假目标航迹所需的总转发时延为 Δt,则:

假设假目标保持径向速度vr不变,则雷达天线扫描1周,假目标的径向移动距离ΔR=vrTθ,则由式(7)可得,假目标径向移动ΔR距离需要的距离转发时延为:

记产生假目标起始航点所需的距离转发时延为ΔtR0,则由式(2)、(9)、(10)可得,干扰机产生第i个假目标的第j个航迹点所需的总转发时延为:

式中:i=1,2,…,n;j=1,2,…。
1.3 航迹欺骗干扰的辅助性参数设计
干扰机的侦收灵敏度、有效辐射功率、干扰压制系数等辅助性参数是有源雷达干扰系统的重要性能指标,干扰成功与否及干扰效果的好坏与其设计是否合理同样息息相关[1]。
1.3.1 侦收灵敏度
已知干扰机接收到雷达主瓣信号的功率为:

式中:Pt为雷达发射信号功率(W);Gt为雷达天线主瓣增益;Gjr为干扰机接收天线增益;Rj为干扰机与雷达间的距离(m);λ为雷达工作波长(m);LP为干扰机与雷达天线极化失配损耗、雷达发射馈线损耗、大气传播损耗(这一项很小,通常不超过0.5 d B~1 d B)。
令PJR取侦收灵敏度Prmin,则可得:

式(13)便是干扰机的侦察方程。
1.3.2 有效辐射功率
有效辐射功率可表示为:

式中:PJ为干扰机发射功率(W);GJ为干扰发射天线增益;k为玻尔兹曼常数,k=1.38×10-23J/K;T0为标准室温,T0=290 K;N为雷达接收机输入噪声系数;ΔF为干扰信号频谱宽度(Hz)。
则由式(14)可求出干扰机的干扰功率。
1.3.3 干扰压制系数及最小干扰功率
假设雷达主瓣接收到距离Rt处的目标回波信号功率为Prs,同时雷达旁瓣接收到距离Rj处的干扰信号功率为Prj,则有:

式中:σ为真实目标的雷达截面积(m2);L′P为干扰机与雷达天线极化失配损耗(圆极化对线极化为0.5),则干扰机能够对雷达实施有效干扰的空间能量条件为:

式中:KJ为雷达接收机输入端的干扰压制系数。
令Prj/Prs=KJ=1,给定雷达各项参数,则根据式(18)可求出不同Rt和Rj下,干扰机所需的最小干扰功率:

2 航迹欺骗干扰信号的产生
2.1 基于数字射频存储器(DRFM)的距离-角度-速度三维联合欺骗点目标生成模型
基于DRFM的距离-角度-速度三维联合欺骗点目标生成模型如图4所示,其由传统转发式欺骗干扰系统与DRFM系统相结合而得到[4-5]。
该模型的主要工作模块如下:

图4 基于DRFM的距离-角度-速度三维联合欺骗式转发干扰生成模型
(1)主控计算机向数字信号处理器(DSP)发送系统各个工作模块的启动、终止和初始化等命令,并设置相应的干扰参数、调制参数,DSP根据接收到的参数和指令实时计算出每次数据更新所需的假目标转发总时延和多谱勒频移,并把其存入相应的锁存器中。
(2)雷达射频信号经系统天线接收,与频率综合器提供的系统本振信号(f0)进行混频,下变频为中频信号,然后通过DRFM系统高速采样将得到的数字信号存入系统存储器中以备读取。
(3)可编程脉冲延时电路根据DSP提供的参数,对雷达中频采样信号进行相应的延时,以满足距离欺骗和角度欺骗的要求,并产生DRFM的数据释放信号,控制DRFM的数/模(D/A)转换器工作,从而恢复出雷达中频信号。且可编程脉冲延时电路可根据需要设置多个脉冲延时单元,从而实现对多个目标及欺骗干扰信号的模拟产生。DRFM读写时序控制如图5所示。

图5 DRFM读写时序控制
(4)DDS根据DSP提供的多普勒频移参数产生新的本振信号(f0+fd′),与D/A转换器输出的雷达中频信号混频,上变频为雷达射频信号。
(5)干扰信号调制模块根据DSP提供的调制参数对重构的雷达射频信号进行幅度调制、功率调整及交叉极化调制(一种应对雷达旁瓣匿影的措施),以生成最终的欺骗干扰信号。
通过图4所示模型可实现一个雷达脉冲重复周期内的多个转发式欺骗干扰信号的产生,接下来通过对多点假目标回波进行快时间域(距离门)积累即可完成航迹欺骗干扰系统和PD雷达系统的对接[6]。
2.2 航迹欺骗干扰信号的数学表达式
PD雷达发射信号为线性调频信号,其复数表达式为:

假定目标初始距离为R0,对应的时延为t0,即t0=2R0/c,则目标回波可表示为:

将雷达发射信号输入图6所示的干扰系统,根据式(9)和式(19)可得到系统生成的干扰信号表达式:

式中:A为雷达发射信号幅度;k为幅度调制增益;Δtθ为方位转发时延;ΔtR为距离转发时延;fd′为多普勒频移。
则对J(t)进行快时间域积累后的数学表达式可记为:

式中:m为雷达动目标检测(MTD)处理时快速傅里叶变换(FFT)的点数。
3 航迹欺骗干扰仿真
本文以“对某型机载预警PD雷达进行航迹欺骗干扰”为研究实例,该PD雷达为低重频脉冲多普勒体制,发射信号采用线性调频信号。
3.1 雷达回波信号仿真
总雷达回波信号应为目标回波信号与杂波信号及系统噪声信号的叠加,即:

式中:n(t)为系统噪声信号;C(t)为杂波信号。
以17个脉冲回波、4个运动目标为例,且设回波时延为零,仿真可得总雷达回波基带复信号的波形,如图6所示。

图6 总雷达回波基带复信号的时域波形
图7 是单个脉冲回波频域脉压的结果,可以看到,通过脉压,4个不同距离位置(不同目标间的间距需大于雷达的距离分辨率ΔR才能被分辨,ΔR=c/2B)上的目标被明显地区分开来,同时可以根据每个目标的横坐标(雷达信号往返各目标的时间)求出其各自相对于雷达的径向距离值。

图7 单个脉冲回波频域脉压结果
3.2 假目标航迹仿真
如图8所示,首先以敌方雷达所处的空间位置为坐标原点,以真实目标所处的方位作为雷达天线扫描的起始参考方位;接下来设定假目标预定航线S(t),并在S(t)上选取假目标的起始航点,根据其坐标信息计算出所选假目标起始航点相对干扰机的距离和方位差,即可求出产生该假目标起始航点所需的时延信息;将此时延信息作为干扰机的输入参数,即可得到系统实际输出的假目标起始航点信息。
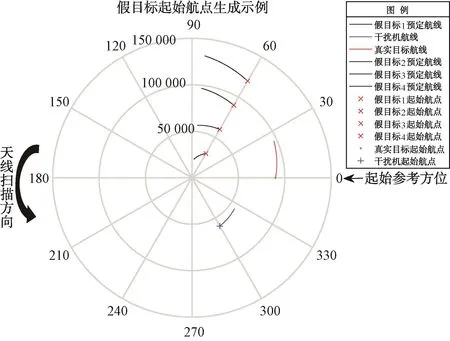
图8 假目标航迹起始航点生成示例
以一个天线扫描周期为时间步长,根据设定的假目标速度求出天线转到第2个步长时干扰机所需的转发时延;将此时延信息作为干扰机输入参数,即可得到系统实际输出的假目标的第2个航点信息;最后可将系统实际输出结果进行显示。后续航点的产生与显示均可按照第2个航点的方法步骤进行[7-8]。

图9 假目标前2个航迹点生成示例
根据所建航迹欺骗干扰生成模型和PD雷达模型,通过MATLAB仿真可得到如图10所示的多假目标航迹欺骗干扰效果。

图10 多假目标航迹欺骗干扰
4 结束语
机载预警PD雷达由于体制和作战使用的特点,具有很强的抗干扰能力。本文研究了基于副瓣干扰的多方位航迹假目标欺骗干扰技术,最终可在被干扰的机载预警PD雷达的PPI显示器上形成假目标航迹,具有较高的欺骗性。