混合推力优化分配研究
2018-10-22宋杨,刘微
宋 杨,刘 微
混合推力优化分配研究
宋 杨1,刘 微2
(1. 中国船舶重工集团有限公司,北京 100097;2. 中国船舶工业集团有限公司,北京 100048 )
单一的推力分配策略在海况多变的情况下往往难以满足推力分配的要求,从而导致船舶失位甚至定位失败。本文结合实际工程应用的需求,对推力分配模式的类型进行分类,并利用合适的算法及策略,制定平滑有效的混合推力分配切换机制,满足多海况下推力分配的要求。仿真实验验证了自适应切换推力分配模块的合理性和有效性。
动力定位 推力分配 切换策略
0 引言
DPS不同运行模式包括定点定位、低速迁移、中高速的迁移等,定点定位主要应用于动力定位作业的船舶与海洋平台上,低速迁移和中高速的迁航在平台供给运输类船舶中较为常见。随着现代水面航行器与海上平台的用途多样化,工作区域也在不断扩大,动力定位钻井平台现在也具备高速迁移的能力[1]。
设计推力分配模块时,需要同时保证船舶的动力定位性能和推进器的稳定性。根据不同的推进器类型,制定不同的海况及工况下相应的分配算法和分配策略,建立合理的切换机制使得这些模式间能够有效的切换是必要的。切换机制的建立考虑两个要求:在保证切换的必要性和不增加切换机制复杂度的前提下,确定“何时”及“如何”进行切换;保证切换过程中推进器系统的平滑过渡,即保证推进器在切换过程中的状态稳定,避免突变引起船舶的安全性能降低。本章结合实际工程应用的需求,对推力分配模式的类型进行分类,并利用合适的算法及策略,制定平滑有效的混合推力分配切换机制。
1 环境力
配备动力定位系统的船舶和平台根据作业区域的不同,所处的外界的海况状况多变。海况的不同对定位能力的影响较大。通常对于风浪来说,按照波高可将风浪分为不同级别。为了保证控制系统在各类海况下有良好的定位性能,Nguyen[2]中提出建立有关环境,操纵,速度的三维数学关系模型,在Ruth[3]和Swanson[4]中则直接在推力分配过程中将海况分为了平静海况和剧烈海况。
在各类工况和海况下,最终作用在船舶或平台上的力可统称为外界环境力,若将风、海浪、海流的作用分开考虑,可能出现多种情况,直接采用综合环境力作为控制目标更为直接方便。针对推力分配的需求,本文中将综合环境力分为三类:
1) 外界环境力较小,方向经常改变;
2) 外界环境力较大,但方向不经常改变;
3) 外界环境里大小和方向变化都比较平缓。
2 分配模式制定
2.1 固定角度分配模式
外界环境力平稳时,控制系统产生的控制力较小,但方向易变,此时全回转推进器若采用可变角度分配模式工作,推进器可能由于控制力方向的频繁变化出现来回转动的情况,这会严重增加推进器的磨损。此时系统可选择固定全回转推进器的角度进行推力优化分配;采用固定角度分配模式时,角度要事先依据大致的环境力方向选取,同时也需避开推力禁区。
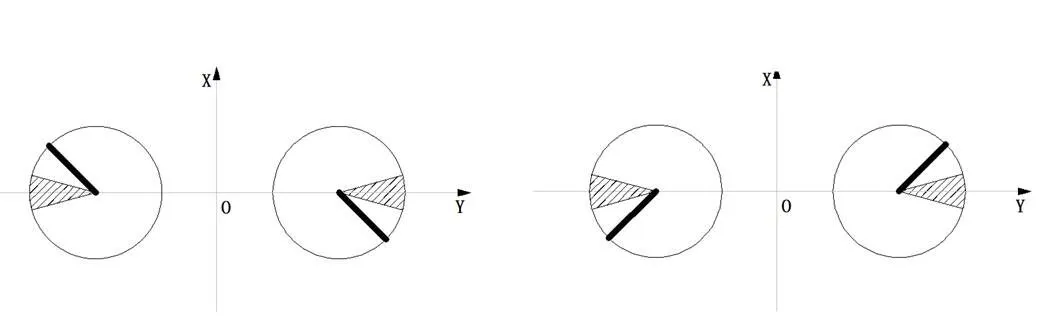
图1 固定角度分配模式角度
2.2 可变角度分配模式
全回转推进器需要考虑角度变化率,推力变化率,水动力干扰等一系列约束问题,一般采用迭代算法予以求解。可变角度分配模式的优点在于计算结果总是以能耗最小为基准,同时满足约束条件,得到最优结果。可变角度分配模式的缺点在于需要充分考虑干扰引起的推力损失和推进器方向连续改变引起推进器的磨损,同时角度变化率的限制常常导致推进器反应滞后于控制力的变化。
2.3 限制角度分配模式
当船舶上全回转推进器配备较少时,用限制角度分配模式来弥补固定角度中不能较好地进行推力分配的情况。控制力和力矩较小且方向易变的时候,配备全回转推进器较少的船舶在固定角度模式下常常出现响应滞后。当全回转推进器不允许发负力时,限制角度分配模式能较好地应对控制力方向频繁地变化。
2.4 环境力固定分配模式
环境力固定模式可应用在外界环境力大小和方向变化平缓时,此时如采用可变角度模式,推进器出现来回旋转会增加磨损,而且在角度变化较小时,能耗并不会有效的减少,选用环境力固定分配模式更为有效。环境力固定分配模式中推进器的角度选择应充分考虑可能出现的环境力方向,同时也应避免水动力干扰区域。

图2 环境力固定模式下推进器角度示意图
3 模式切换
3.1 切换机制
单一的算法、分配策略或推力分配模式都难以保证不同工况及海况下动力定位系统的稳定性和定位能力。本文中以两种算法为基础算法,形成以四种不同分配模式构成的自适应推力优化分配模块,完成合理的推进器推力分配。四种分配模式的切换原则包含有:任意模式间都能做到平滑的切换;切换过程中推进器在满足约束条件的基础上尽可能保持稳定的工作状态;避免不必要的频繁切换。
3.2 切换逻辑及指标
环境力的变化对动力定位系统的定位能力有较大影响,环境力并非直接作用在推力分配模块上,而是由上层控制模块按定位要求输出控制力到推力分配模块,此时以控制力大小作为切换目标则更为合理。同时,推进器的分配模式主要是由X和Y方向的控制力变化情况所决定,可建立如下标准:

在控制力平稳且能耗变化较小的情况下,推进器分配趋于平缓,此时推进器容易出现小角度的来回转动,这会极大地增加磨损,此时可引入能耗差值项和控制力差值项:
此外根据全回转推进器的配置个数和推进器能力建立判断标准,以便在控制力较小且方向易变时保证动力定位系统的定位能力。

式(3) 中分级控制切换指标分别指向可变角度分配模式、环境力固定分配模式、固定角度分配模式及限制角度分配模式。在第一级判断中,依据控制力的大小和第一级迟滞时间作为判断指标分为两种情况。第一种情况,当控制力较大时,进入第二级判断,依据控制力变化情况和能耗变化情况在可变角度分配和环境力固定分配模式间进行选择;第二种情况,当控制力较小时,进入第二级判断,依据推进器配置在限制角度分配和固定角度分配模式间进行选择。
4 仿真结果与分析
为验证本章中提出的混合推力分配模式切换机制的有效性,在船舶模型上进行仿真定位实验。推进器布置见图3。
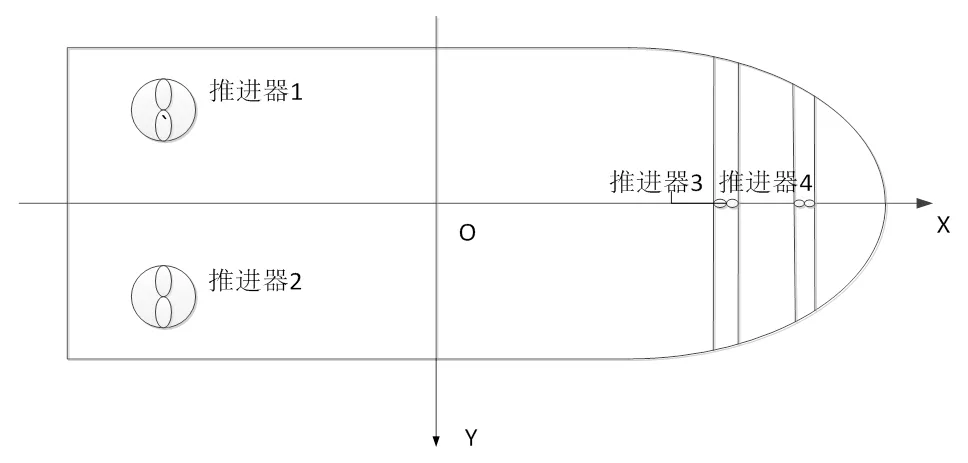
图3 推进器布置
为模拟船舶受到真实的环境力影响的情况,仿真中使用PID控制器,在不同的阶段改变外界环境力参数以模拟真实环境力,其中分别在阶段1和2和阶段加入较小方差的高斯白噪声,阶段4中加较大方差的高斯白噪声,环境力参数设定如表1所示。
表1 各阶段环境力参数

参数风速均值(m/s)风向均值(°)海流速度(m/s)海流方向(°) 阶段1200.10 25100.2-20 37300.2-45 44600.1-70 51900.01-90
推力分配计算过程中,不同分配模式对应的模式指标值见表2。
仿真结果如下:
从图4到10可以看出,推力分配的结果满足控制力和力矩的要求,推进器的推力及角度变化满足各类约束条件。
第1阶段中,环境力较小,且方向反复发生变化。从图10中可知,起始分配模式为可变角度分配模式,经过5个周期判断其经过临时固定角度分配后,推力分配模式由可变角度分配模式切换至限制角度分配模式,分配过程中推进器角度变化平缓。
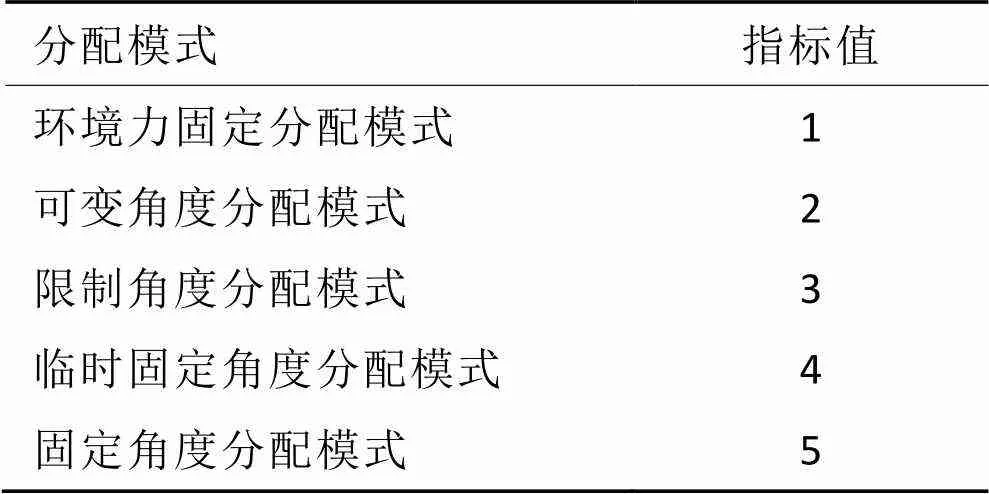
表2 切换模式指标值
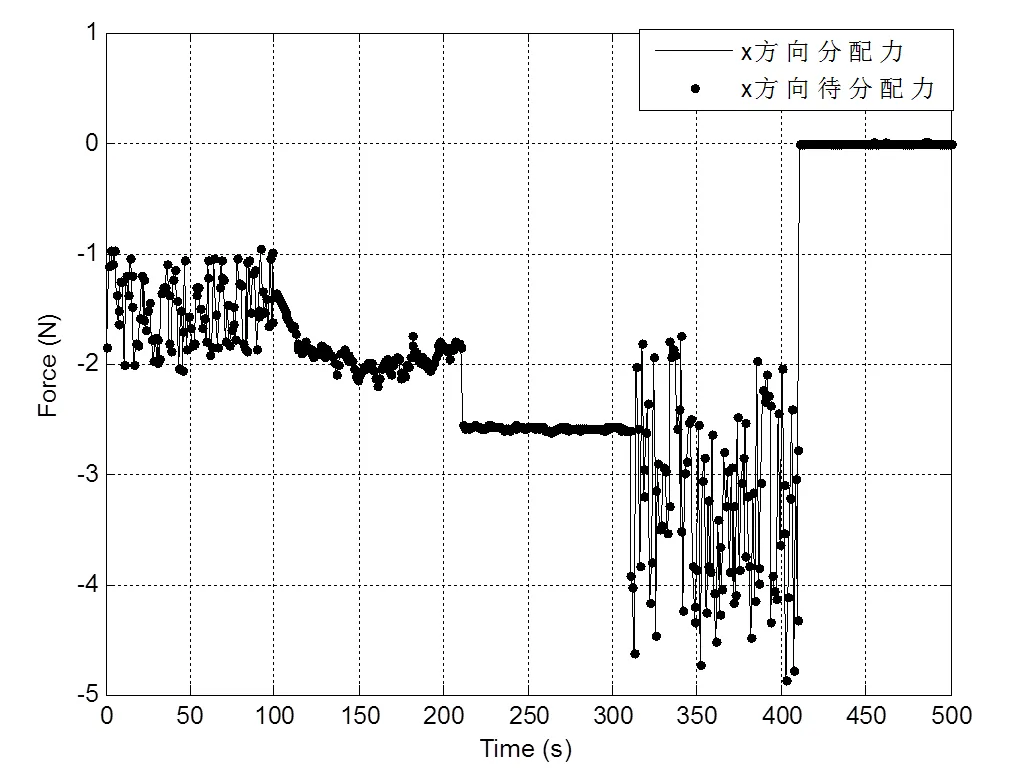
图4 纵向控制力分配结果
在第2阶段,环境力逐渐增大,第100周期时,环境力超过控制力切换的上限,在第105个周期时切换至可变角度模式。第2阶段内的环境力由于加入了方差较小的高斯白噪声,在图中可以看到,在140周期左右,分配模式切换至环境力固定分配模式。由于控制力合力方向在第2象限,推进器1和推进器2根据预先的设定,分别转到180°和90°。而到170周期,由于出现较大的环境力扰动,而重新转至可变角度分配模式。

图6 控制力矩分配结果

图7 全回转推进器推力分配结果
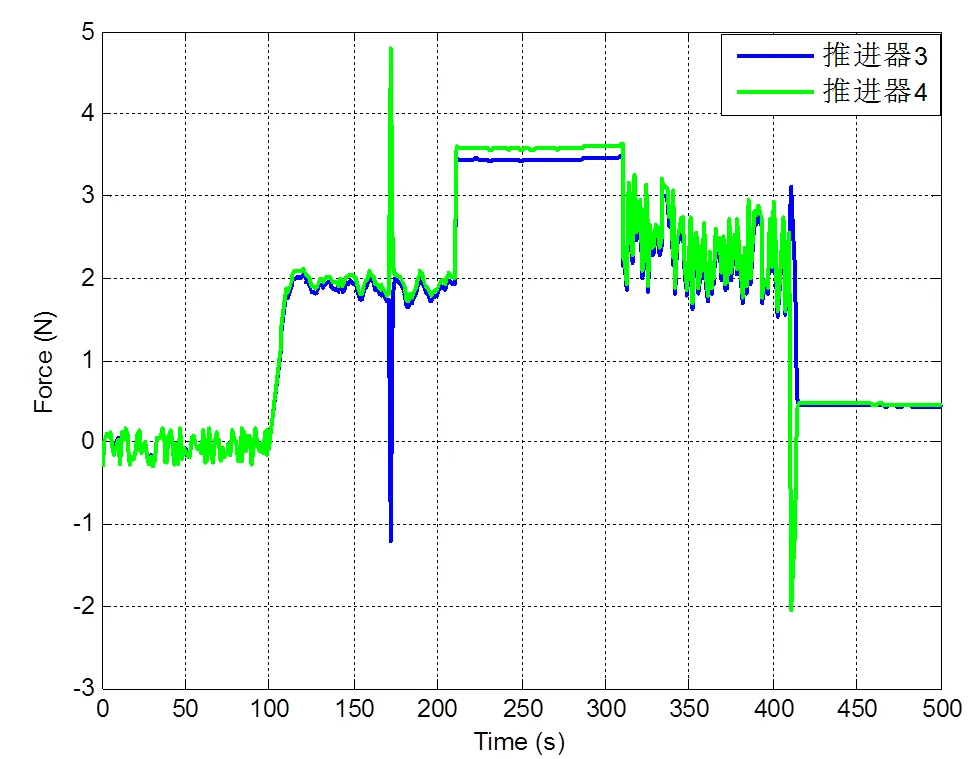
图8 槽道推进器推力分配结果
到第3阶段,环境力比较平稳,推进器的状态相对稳定,能耗波动较小,此时分配模式再次切换至环境力固定分配模式,控制合力在第2象限,推进器1和推进器2分别转到180°和90°。
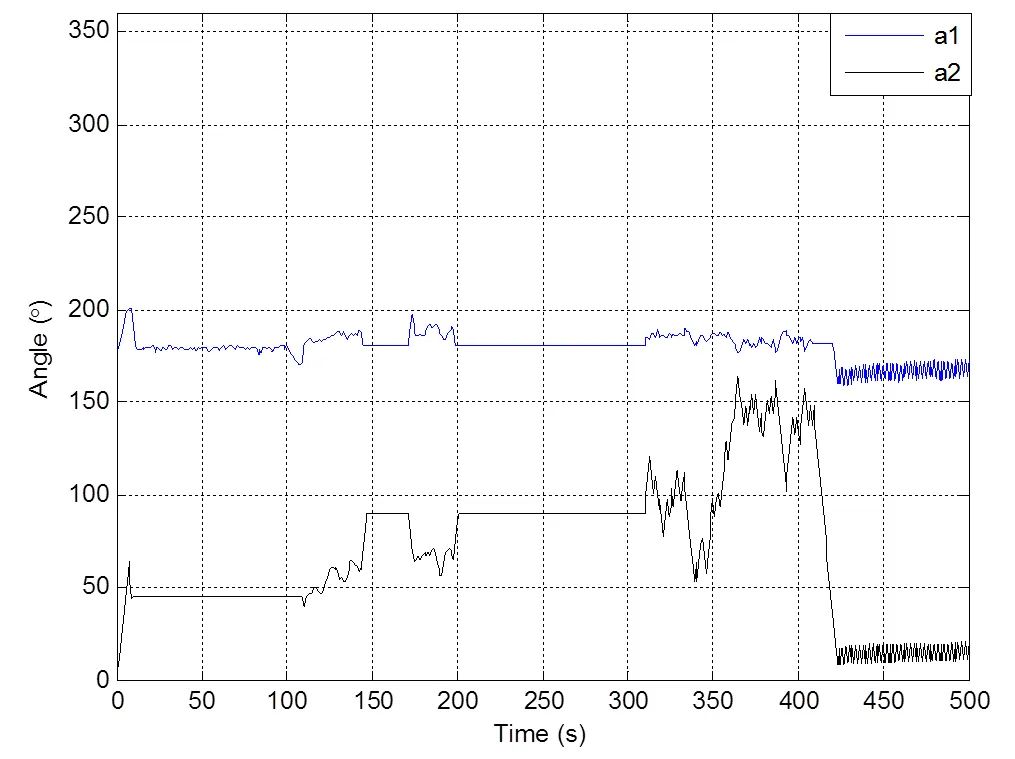
图9 全回转推进器角度分配结果
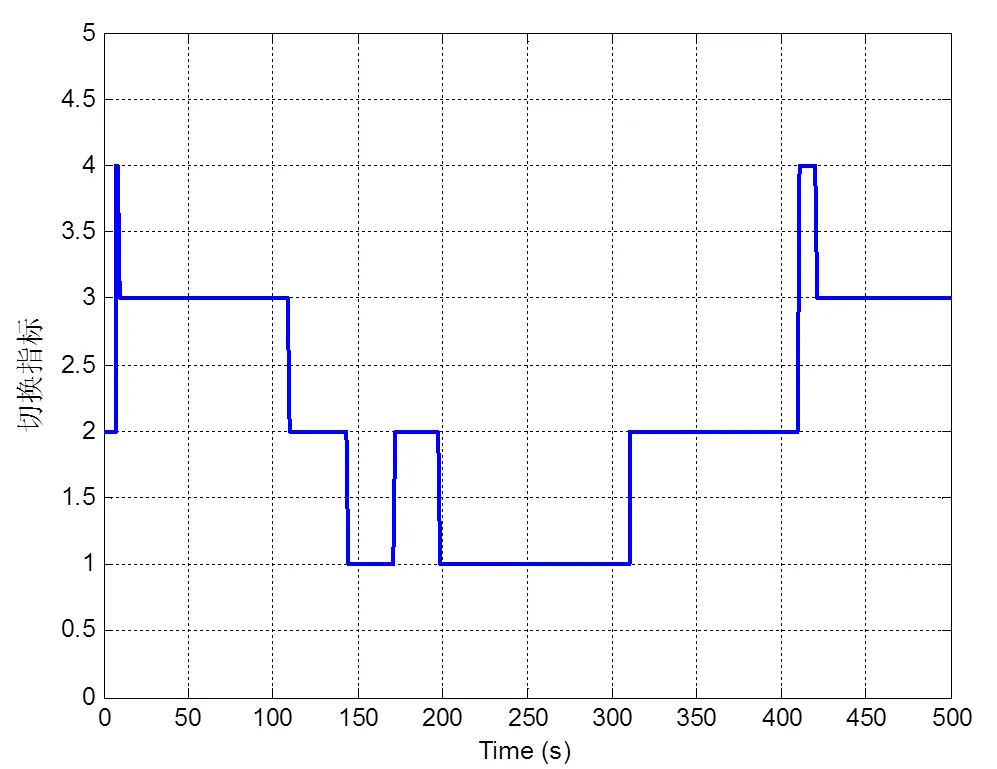
图10 切换指标值分配结果-
第4阶段,环境力中加入方差较大的高斯白噪声,产生了较大的波动,分配模式切换到可变角度分配模式,保证分配结果能耗最优。
第5阶段,环境力发生突变降至0附近,本章中选用船舶模型全回转推进器个数为2且设置不能反转,分配模式在410周期时切换至临时固定角度分配后经过10个周期最终达到限制角度分配模式的边界上,分配模式切换到限制角度分配模式。
5 结束语
本文依据动力定位船舶或平台工作状况和所处海况的多样性,结合推进器状态及推进器配置等参考指标,建立合理有效的推力分配切换机制。利用控制器与混合推力分配模块进行仿真实验,验证了自适应切换推力分配模块的合理性和有效性。
[1] 王芳. 过驱动水面航行器的控制分配技术研究[D]. 哈尔滨工程大学, 2012.
[2] Nguyen. Design of Hybrid Marine Control Systems for Dynamic Positioning[D]. NUS, 2005.
[3] Ruth. Propulsion control and thrust allocation on marine vessels[D]. Norwegian University of Science and Technology, 2008.
[4] Swanson. A generalized propulsion control logic[J]. IEEE, 1982: 723-727.
Research on Hybrid Thrust Optimization Distribution
Song Yang1, Liu Wei2
(1. China Shipbuilding Industry Co. LTD. Beijing 100097, China; 2. China State Shipbuilding Co. LTD. Beijing 100048, China)
TP391.9
A
1003-4862(2018) 10-0056-05
2018-05-21
宋杨(1986-),男,工程师。研究方向:船舶电气。E-mail:15902791474@163.com