级联多电平变换装置分布式系统实现方案
2018-10-22张松涛
吕 飞,张松涛,吉 哲
级联多电平变换装置分布式系统实现方案
吕 飞,张松涛,吉 哲
(海军士官学校机电系,安徽 蚌埠 233012)
级联多电平变换装置因具有输出波形失真少、元件电压应力低及电磁干扰小等优点得到广泛应用。文章提出了级联多电平变换装置的一种分布式控制系统的实现方案,变换装置分布式系统由通用控制器、硬件管理器及功率单元等模块通过改进的运动与控制环形光纤网络(MACRO)连接而成。分析了实现该方案的硬件结构、功能和方案中采用的网络结构及其通讯协议,给出了解决同步问题的方法。
级联多电平变换装置 运动与控制环形光纤网 通讯协议 同步
0 引言
随着电力电子技术的发展,电力电子变换装置的复杂性与可靠性及其应用的广泛性之间的矛盾越来越尖锐。这一矛盾对于大容量电力电子变换装置尤为突出。模块化设计是解决上述问题的有效手段之一。从提高电力电子装置的可靠性和通用性出发,基于模块化设计以及分层管理的思想,本文提出了级联多电平变换装置分布式控制的一种实现方案。
1 级联多电平变换装置分布式系统结构
电力电子变换装置的传统设计和制造,存在非标准件多、劳动强度大、设计周期长、成本上升、可靠性低等问题。随着海军战舰、潜艇等作战平台向电力推进、区域配电、高能脉冲武器系统等电气化程度更高的方向发展,对电力电子变换装置的需求越来越多且可靠性要求越来越高。在大功率变换器的研究方面,电力电子系统研究中心(CPES))电力电子网络、通用控制器、电能变换模块、智能传感模块、电力电子系统的软件结构等方面都作了大量的研究工作,取得了一些成果[1-3]。
根据级联多电平变换装置的特点,从模块化设计及分层管理的思想出发,本文提出了模块化的分布式电力电子控制系统拓扑结构,如图1所示。采用这种结构可以解决传统集中式控制存在的点到点的连线过多、系统扩展不方便等问题。在这种控制系统中,装置由通用控制器、硬件管理器、功率单元模块组成。各模块通过运动与控制光纤环网联接连接成为一个整体,共同完成电能的变换。
2 级联多电平变换装置系统硬件结构
2.1 通用控制器(UC)
通用控制器结构如图2所示,通用控制器的结构完全独立于所控制的变换器。通用控制器的功能主要有[4]:
1)实现DeviceNet接口及其协议实时与人机接口连接,便于管理。
2)实现光纤通信接口及MACRO协议实时发送控制命令并接受硬件管理器的反馈信息。
3)实现反馈信息识别判断处理,根据需要改变控制策略。
4)利用LED显示系统的各种状态。

图1 级联多电平变换器的模块化分布式控制系统拓扑结构
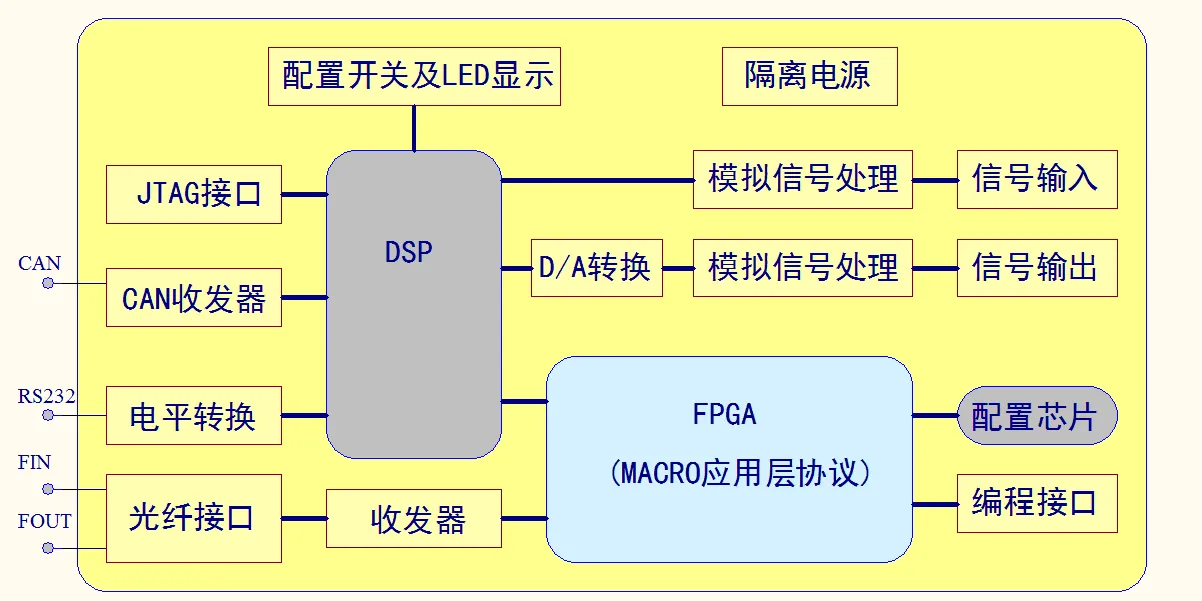
图2 通用控制器的组成框图
通用控制器的核心是TI公司的TMS320F2812数字信号处理器DSP。通过对软件的重构即可完成系统的改进和升级,从而大大减少费用。
2.2 硬件管理器(HM)
硬件管理器结构组成框图如图3所示,硬件管理器是通用控制器与功率单元的桥梁。硬件管理器的功能主要有:
1)与通用控制器连接实现光纤通信及MACRO协议。
2)接受转换电压、电流、温度等信息,并及时发出过压、过流、过热等保护的控制信号。
3)接收通用控制器的同步控制信号,实现同步功能。
4)接收来通用控制器的占空比等控制信号,实现PWM及死区插入功能。
5)实现驱动信号的隔离及放大。
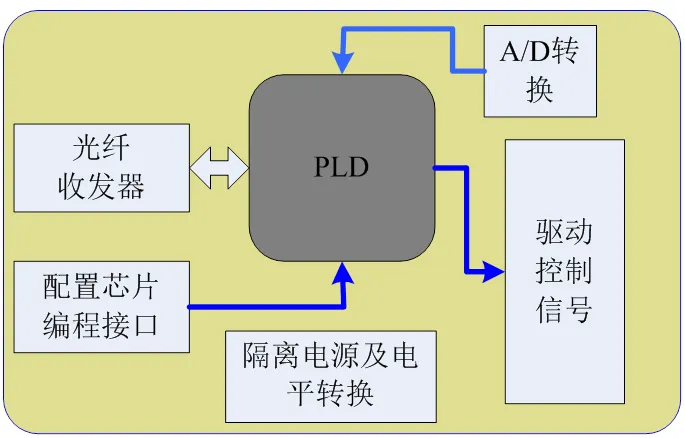
图3 硬件管理器的组成框图
硬件管理器的主要功能由可编程逻辑器件PLD实现,PLD具有灵活、可重复使用、开发周期短等优点。同时也增强了抗干扰能力,提高了可靠性。硬件管理器根据所控制的硬件模块的不同,可分为基于开关的硬件管理器、基于相臂的硬件管理器和基于H桥的硬件管理器等。基于相臂的硬件管理器如图4所示。
如图4所示,基于相臂的硬件管理器包括门级驱动;光纤通信接口,用来接收来自通用控制器的驱动信息及其向上反馈状态信息;AD转换器,把传感器传输来的模拟量转换成数据量;一个隔离的直流电源作为板载驱动电源;可编程逻辑器件(PLD),用来编辑和存储控制逻辑。
硬件管理器的管理逻辑是在可编程控制器PLD中设计和实现的,外围电路包括光电收发转换器、AD转换器、IGBT的门级驱动器等。硬件管理器中的PLD逻辑器件的设计是最重要和复杂的部分。
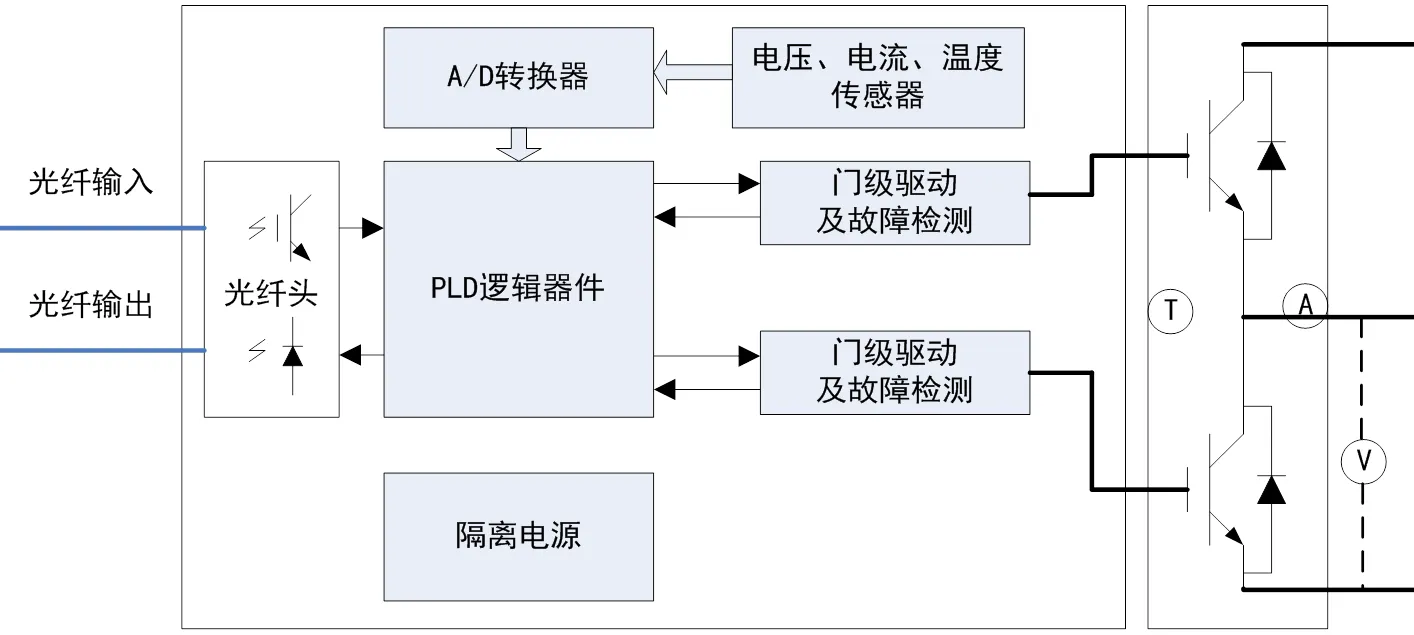
图4 基于相臂的硬件管理器组成框图
可编程逻辑器件PLD的主要功能是控制和协调串行通讯;处理接收和发送的数据;给开关管发送PWM脉冲;获取同步数据;实现电压和电流的采样;提供过压和过流保护。
2.3 功率单元模块
功率单元模块主要包括功率器件、驱动单元与传感器。主要功能有:
1)接受硬件控制器发出的控制信号并驱动相关器件实现电能变换。
2)检测器件电压、电流、温度信息,并向硬件控制器传送。
本文认为现阶段由于集成技术的限制以及干扰的存在,把硬件管理器与功率单元模块分离更具有现实意义,同时也提高了设计的灵活性。
3 级联多电平变换装置系统网络协议
如图1所示,级联多电平变换装置分布式控制系统应用了设备网(DeviceNet)和运动与控制环形光纤网(MACRO)。
3.1 设备网协议
DeviceNet是由Allen-Bradley公司开发的一种基于CAN的开放的现场总线标准。DeviceNet是一个开放性的协议,DeviceNet协议设计简单,实现成本较为低廉[5]。
该方案采用TI公司的TMS320F2812数字信号处理器内部集成了增强型CAN控制器,因此采用该DSP实现DeviceNet的硬件电路比较简单,图5是具有隔离功能的CAN发送和接受电路原理图。采用两片高速光电隔离器6N137实现CAN总线信号和DSP电路间的电气隔离,以提高系统的抗干扰能力。发送与接收采用的是Philips的PCA82C250专用CAN总线驱动芯片。
3.2 运动与控制环形光纤网(MACRO)协议
MACRO环是一个环形网络,环形网络中可包含多个主节点和从节点,各节点串行数据发送、接收端口首尾相连,网络从主节点中选取一个作为活动主节点,允许活动主节点和所有的从节点以及非活动主节点之间的通讯。通讯的时候由活动主节点沿着数据流方向发送一个含有地址的数据包。其他节点接收这个包后判断是否地址匹配,如果不是就沿着数据流方向传递至下一个节点。活动主节点可以根据网络需要而更替。
MACRO采用如图6所示的12字节的数据包,其中数据字节被定义为一个24位和三个16位的寄存器组;地址字节由四位主节点编号和四位从节点编号构成;命令字MACRO只定义了同步命令(CMD-0)和数据命令(CMD-1)两种,并且规定连续两个CMD-1表示主站之间指挥棒的移交。MACRO采用和效验方式。
MACRO规范中,采用多模玻璃光纤或双绞线作为传输媒质,但并没有排除采用其它媒质的可能。因此,可采用更为方便和廉价的单模塑料光纤(POF)作为物理层的通信媒质。
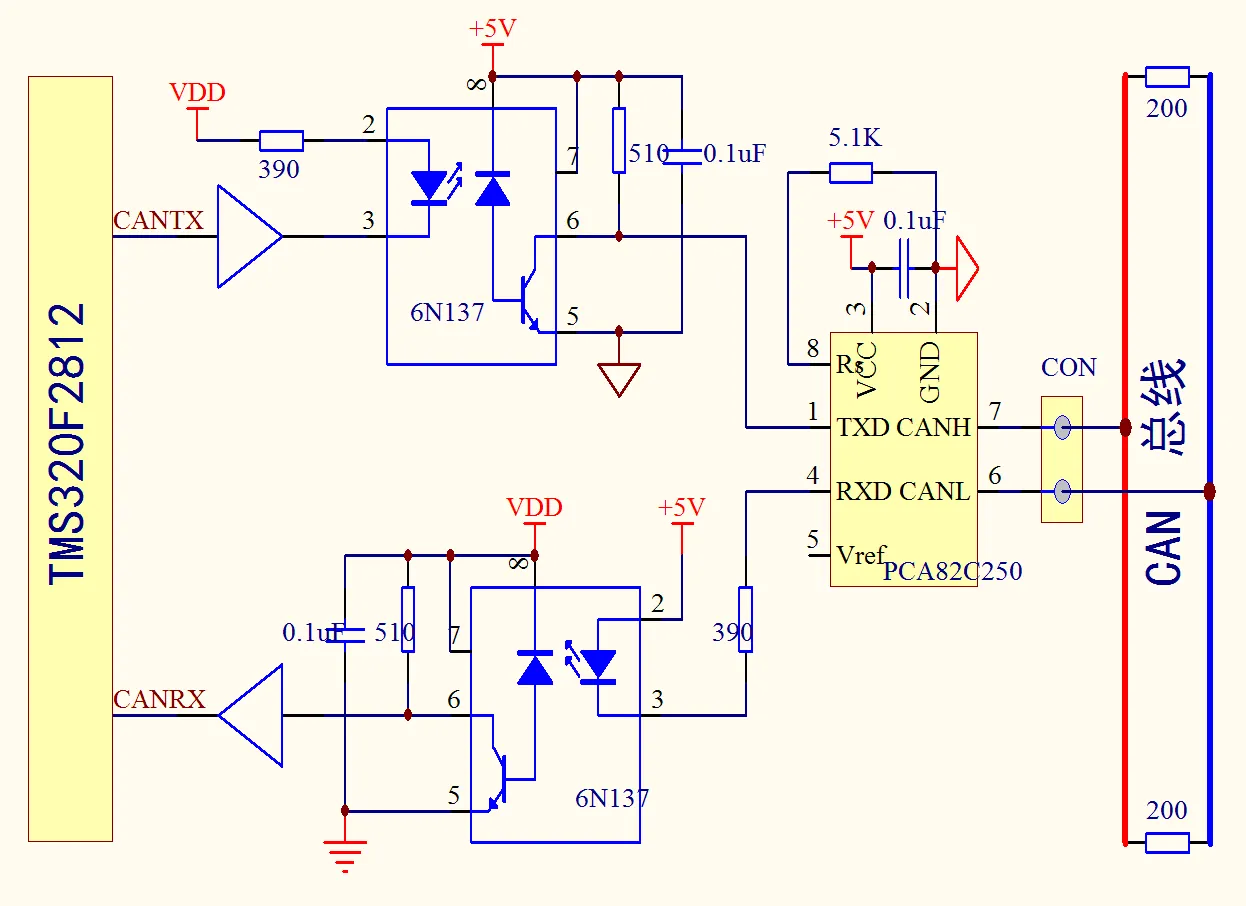
图5 隔离型CAN总线接口电路

图6 MACRO网络协议数据包组成
在级联多电平变换装置分布式控制系统中,将通用控制器和各个硬件管理器采用光纤联成环形网络进行通讯,网络中通用控制器和硬件管理器分别定义为主节点和从节点。这种网络拓扑结构可以看成是只有单一主节点的MACRO。如图7所示,在每个节点上均有一对串行数据收发口,每个节点的接收口与上一节点的发送口相连,发送口与下一节点的接收口相连,形成一个封闭的环形,数据信号沿着环单向传输,依次通过每个节点。
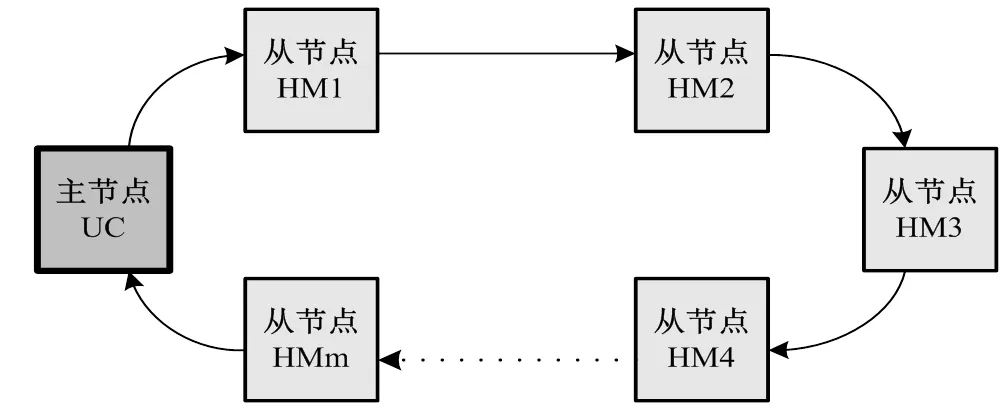
图7 级联多电平变换装置通讯网络拓扑
对于图7所示的光纤环网拓扑,仍采用MACRO协议的数据包。针对严格的同步和实时的要求,对MACRO的同步方式进行修改,采用发送同步数据实现同步。
在高速串行通讯环形网络中,由于信息发送模式为点对点,数据信号依次通过每个节点,所以不同位置的从节点接收主节点发送的信息必定存在不同的传输延时。而各个从节点对电流、电压采样和对功率器件的驱动必需在同一时刻开始,如果不同步将引起输出PWM脉冲的相移和数字控制的数据源不准确,导致系统波形畸变。并且开关频率越高、节点数越多、节点间距离越远,则延时时间越长,各从节点不同步的影响越明显。要解决这种从节点之间的不同步问题,首先必需找到导致数据包到达各从节点的传输延时的原因,有以下几点:
1)每个周期传送的数据包数,根据通讯接口的速率,传输一个数据包消耗的时间。
2)节点个数,节点在接收和发送数据包过程中,需要将接收到的数据包串并转换,分析比较后,如果不是本节点的数据则将数据并串转换后发送出去。数据在这种串并、并串转换中要消耗时间,一般在单个节点一次串并和并串转换时间为ns级。
3)节点之间传输介质(光纤)的长度。
设系统有个从节点,光纤环网的通讯速率为,每个节点间光纤长度为,光纤单位长度的延时为T,同步数据包在一个节点中串并、并串转换消耗时间为T。则总的传输延时T为:

可见,数据到达每个节点的延时与数据通过的节点个数成正比。在一个环形网络中,在数据传播的途径中每经过一个节点就代表着有一个传播延时T,因此,需要包含同步信息的同步命令使各节点保持同步,环形网络中同步延时的累计效果如图8所示。
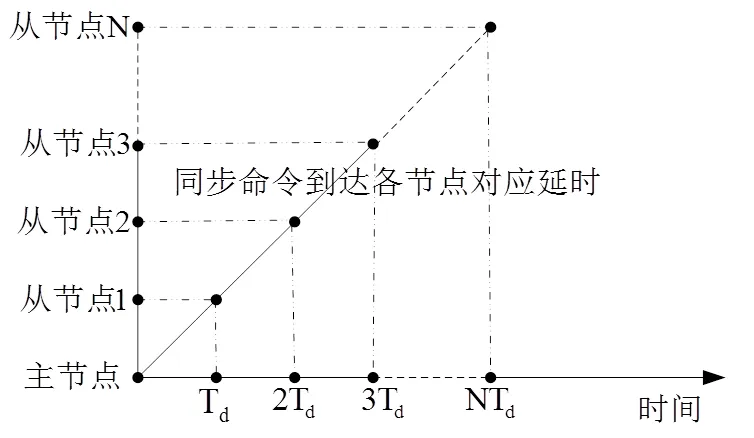
图8 节点的延时累计
解决同步问题的方法是在每个从节点接收到同步命令后根据同步信息增加若干个单位延迟时间来补偿传播过程中的延时。就是说先接收到同步命令的从节点根据同步信息主动延迟同步信号的产生。主节点负责配置每个从节点的单位延时个数并且传递给各个从节点,每个从节点延时表达式为:
式(2)中是节点的总数,是节点的相对地址,T是数据通过一个节点的单位延时。
4 结论
本文从提高电力电子装置的可靠性和通用型出发,基于电力电子模块的思想,提出了级联多电平变换器的一种模块化分布式控制系统结构。系统由通用控制器(UC)、硬件管理器(HM)及功率单元等模块组成,这些模块通过运动与控制环形光纤网络(MACRO)连接为一个整体,并且通用控制器可以通过DeviceNet现场总线与上级控制器、人机接口等设备进行通信。本文介绍了各单元模块的硬件结构和功能,详细分析了HM的各部分的功能和HM的工作原理,并给出了MACRO的通讯协议中解决同步问题的方法。
[1] Guo J H, Edwards S H, Borojevic D. Elementary control objects: toward a dataflow architecture for power electronics control software[C]. PESC’2002, Acaplco, 2002: 1705-1710.
[2] Lee F C, Vanwyk J D. An integrated approach to power electronics systems[C]. IEEE PCC’2002, Anaheim, 2002: 7-12.
[3] Boroyevich D, Edwards S. Power Electronics Building Blocks: “Plug and Play” Hardware and Software Architectures[R]. New York, Final Report Prepared for Office of Naval Research (ONR), 2003.
[4] Sirisukprasert S, Lai J S. Optimum harmonic reduction with a wide range of modulation index for multilevel cinvertr[J]. IEEE Transactions on Industry Electronics, 2002, 49(4): 875-881.
[5] 邵贝贝. 嵌入式实时操作系统MicroC/OS- II(第二版)[M]. 北京: 北京航空航天大学出版社, 2003.
A modular Distributed Control Structure for the Implementation of a Cascaded Multilevel Inverter
Lye Fei, Zhang Songtao, Ji Zhe
(Electromechanical Department, Naval Petty Officer Academy, Bengbu 233012, Anhui, China)
TM3
A
1003-4862(2018)10-0043-05
2018-05-14
吕飞(1982-),男,讲师,硕士学位。研究方向:电力电子与电力传动。E-mail: lf19828050@163.com