基于附着系数的车辆EPS模糊灰预测控制研究
2018-10-20袁传义刘成晔
袁传义,张 焱,刘成晔
(江苏理工学院,常州 213001)
0 引 言
电动助力转向系统(以下简称EPS)能协调车辆的操纵和稳定性,国内外对其开展了广泛研究[1-4]。文献[5-7]主要针对于低附着系数路面进行了助力特性设计和回正特性分析等相关研究。由于车辆行驶环境的复杂性和驾驶员驾驶意图的多变性,都使得车辆行驶工况复杂多变。本文设计一种基于路面附着系数的EPS模糊灰预测助力控制系统,基于CarSim软件建立整车动力学模型,在Simulink中建立机械转向系统、电机和模糊灰预测控制系统模型,设计EPS模糊灰预测控制策略,协调了不同附着系数路面下车辆转向行驶时的操纵性和安全性。
1 EPS模型
1.1 转向盘模型
通过转向盘、输入轴等进行受力分析,获得下列运动方程:
(1)
扭杆受到转矩会发生扭转变形,并且转矩与扭转角度成正比关系,设计了通过扭杆扭转变形量实现转矩检测的传感器,即有:
Tsen=Ks(θs-θe)
(2)
式中:Ks为扭杆刚性系数;θe为输出轴旋转角。
1.2 电动机模型
以电动机为研究对象可以获得等效电路,如图1所示。

图1 电动机等效电路
根据图1的等效电路,可以得到如下关系式:
(3)
电动机输出转矩:
Tm=KaI
(4)
式中:Ka为电动机的转矩系数。
对直流电机的机械部件进行受力分析可以获得如下关系式:
(5)
在实际的EPS控制过程中,助力转矩Ta可以表示:
Ta=Km(θm-Gθe)
(6)
1.3 输出轴子模型
以输出轴和直流电机为研究对象进行动力学分析,可以获得:
(7)
1.4 齿条子模型
以齿条和小齿轮机构为研究对象进行动力学分析,可以获得:
(8)
2 助力特性曲线设计
本文结合文献[8]选用并设计直线形助力特性曲线,开始助力时转向盘转矩取为1 N·m,最大助力时转向盘转矩选取为5 N·m,助力临界车速选取为80 km/h,使得驾驶员操纵力矩增加,提高汽车高速行驶时的路感,即车速越低,助力电流越大。图2是本文设计的助力特性曲线。
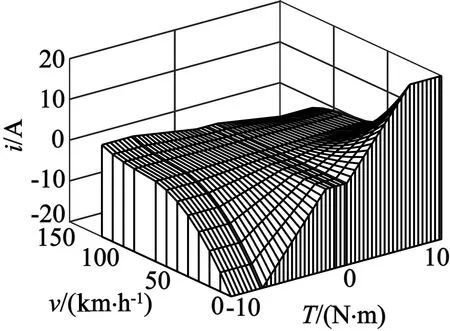
图2 助力特性曲线
依据转向盘操纵转矩和汽车行驶速度可以确定基本助力电流。低附着系数路面作用在轮胎上的纵向力、侧向力及回正力矩都较小,此时的转向阻力矩将会大幅减少,驾驶员容易失去路感,此时应适当减小助力转矩,提高驾驶员操纵转矩。考虑附着系数对助力特性的影响,引入一个可调因子f1,提出了一种随附着系数φ变化的S形分布目标函数G(φ),即:
(9)
式中:a,c为形状参数,取值分别为2,3,其随附着系数变化的分布曲线如图3所示。
预期助力电流由助力特性输出的基本助力电流乘以可调因子f1。从图2和图3中可以看出,在相同的车辆行驶速度和操纵转矩下,当附着系数较大时,调整因子f1基本等于1;当在附着系数较低的路面时,调整因子f1迅速减小,可获得较小的预期助力电流,减小助力电机助力转矩输出,加大驾驶员操纵转矩。

图3 S形分布函数G(φ)曲线
3 EPS模糊自调整控制系统设计
综合考虑路面、当前汽车行驶速度和驾驶员操纵转矩对助力电机助力转矩的影响关系,设计了一种如图4所示的基于路面附着系数的EPS模糊灰预测系统。

图4 EPS模糊灰预测
驾驶员通过转向盘输入转向盘转角,经过机械转向系统输出齿条位移,根据车辆结构参数,通过查表确定汽车左、右前轮转角,加载到CarSim整车动力学模型,输出的齿条阻力反馈给齿轮齿条,由操纵转矩和车速确定基本助力电流,依据路面附着系数调整得到预期助力电流,由步长自调整灰色预测模型得到预测助力电流,模糊参数自调整控制器根据预测助力电流和助力电机实际电流的差及其变化率确定最终助力电压,助力电机依据控制器输出的助力电压输出助力转矩,与操纵转矩共同作用在转向柱上,实现EPS模糊灰预测控制。
传统模糊控制器的模糊控制规则通常是不可调整的。模糊参数自调整控制器引入另一个可调因子f2,它是一种可以在线修改控制规则的模糊控制器,提出一种钟形分布模糊目标函数Gu(E),即:
U=-[f2·E+(1-f2)·Ec]f2∈[0,1]
(10)
(11)
式中:形状参数a,b,c分别为2,5,0。Gu(E)随偏差E变化的曲线如图5所示。

图5 Gu(E)随偏差E变化的曲线
从图5中可以看出,小偏差范围内调整因子f2基本不变,此时主要根据偏差的变化速度进行调节,能提前提供较大的调节作用,克服可能会出现振荡乃至失稳现象。而当系统呈现大偏差时,调整因子f2迅速调整,促进系统快速稳定。基于助力电流的模糊自调整控制原理如图6所示。
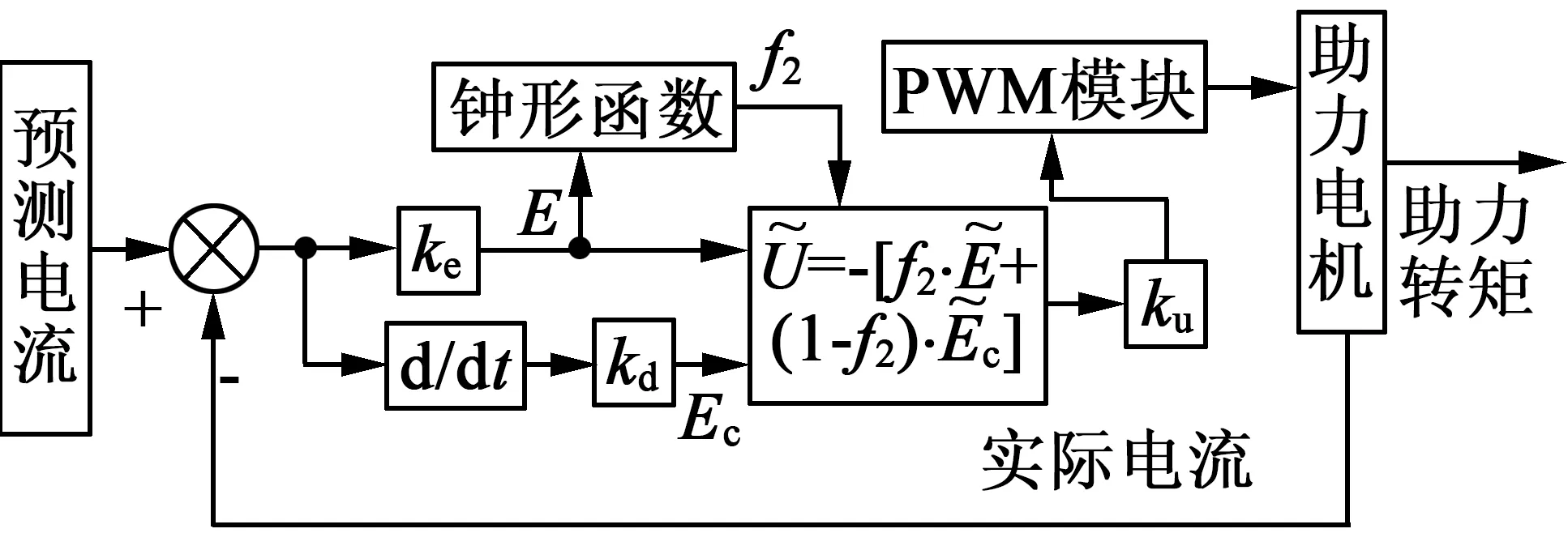
图6 模糊参数自调整控制原理图
预测助力电流和助力电机实际电流之差乘以量化因子作为模糊控制器的输入E,其差的变化率乘以量化因子作为模糊控制器的输入Ec,模糊控制器输出助力电压,钟形分布目标函数根据偏差E,自适应调整可调因子f2,进而在不同偏差的状况下实现对助力电机助力电压的调节工作。
4 步长可调整的灰色系统预测模型
由于车辆是高速行驶的交通工具,同时行驶工况具有复杂多变性,用当前行驶状态对车辆进行控制必然会导致一定程度的滞后,影响控制效果。所以本文利用灰色预测模型对车辆所需助力电流进行预测,用未来状态控制车辆。
1) 确定模型类型
灰色模型GM的建模是通过利用原始数列累加生成数列的方法建立微分方程[9]。本文需要对助力电流进行预测,所以采用一阶单变量的灰色预测模型GM(1,1)。GM(1,1)的表达式为如下:
(12)
(13)
(14)
2) 数据处理
当被预测量为负时,直接作累加操作会因为正负相互抵消,从而引起信息可能丢失的现象,因此必须把原始数列对应的映射成非负数列。利用指数映射可将原始数据变换成非负数列:
x(0)(k)=exp [r·x(0)(k)]k=1,2,…,n
(15)
3) 构造数据矩阵和数据向量
紧邻均值生成序列Z(1)则通过累加生成数列x(1)获得:
Z(1)={z(1)(2),z(1)(3),…,z(1)(n)}
(16)
z(1)(k)=0.5x(1)(k)+0.5x(1)(k-1)
k=2,3,…,n
(17)
结合Z(1)和x(0)可以构造如下数据矩阵:
(18)
4) 辨识GM参数模型
GM(1,1)中的参数a和b都是待辨识的参数,本文采用最小二乘法进行参数辨识:
(19)
5) 建立时间响应模型
在获得辨识参数a和b后,即可求得GM(1,1)的解:
(20)
为实现不同步长的预测量,可对式(20)进行外推,即得到p步后预测值:
(21)
6) 数据还原
经式(20)得到的预测值是由指数变换后的数列获得的,必须对预测值还原才能用于实际的控制决策中,即首先对预测值进行累减变换:
(22)
(23)
由于转向系统工况复杂多变,采用单一步长的灰预测控制算法很难同时满足系统对响应速度、超调量和调整时间等多方面要求。为改善不同工况下的控制效果,本文利用模糊控制器实现预测步长实时调整,步长自调整模糊灰色系统预测模型如图7所示。

图7 步长自调整模糊灰色系统预测模型
根据当前时刻的预期电流和实际电流的误差及其变化量,由模糊控制器确定当前适宜的预测步长。如果误差正小、变化率为负大,为抑制系统产程大的超调,应增大p值,依此设计模糊控制规则。
5 仿真结果分析
在MATLAB R2016和CarSim2016环境下建立EPS机械系统、汽车整车模型及其模糊自调整控制系统,给定正弦信号作为转向盘转角输入信号进行仿真计算,结果如图8所示。
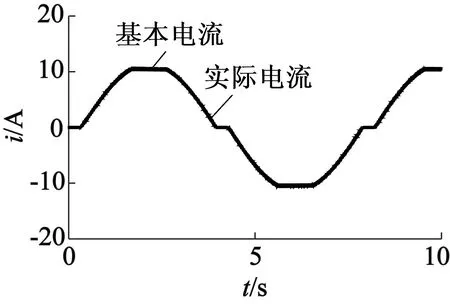
(a) 车速60 km/h,附着系数0.85

(b) 车速20 km/h,附着系数0.3
从图8(a)中可以看出,在高附着系数路面,能够实现较大的助力转矩输出,实现车辆转向行驶时的操纵轻便性;从图8(b)中可以看出,在低附着系数路面转向时,实际助力电流远小于基本助力电流,说明同样行驶工况下,随着路面能提供附着能力的下降,为避免出现过度打滑现象,需要助力电机提供的助力转矩比在高附着系数时要小得多,此时需要驾驶员输入更大的操纵转矩,提高驾驶员路感,有利于提高转向过程中的行驶安全性。
为验证模糊灰预测控制系统的有效性,以幅值为90°阶跃信号作为转向盘转角输入信号,观察横摆角速度的变化规律,结果如图9、表1和表2所示。

(a) 车速20 km/h,附着系数0.3

(b) 车速60 km/h,附着系数0.85

附着系数无助力常规PID模糊灰预测控制0.3 18.2320.7618.920.8537.6133.3633.21

表2 差的结果比较 单位:(°)/s
从仿真结果中可以看出,常规PID控制方法获得的横摆角速度峰值和标准差都较大,此时路面作用在轮胎上的纵向力、侧向力及回正力矩都较小,驾驶员输入转矩下降,容易失去路感;而模糊灰预测控制的EPS的横摆角速度超调现象得到有效抑制,并且此时驾驶员需要输入更大的操纵转矩,有利于提高路感。在高附着系数路面上与无助力转向系统相比,经过模糊灰预测控制后的EPS,横摆角速度峰值与标准差下降了11.7%与43.1%,减小超调量的同时,大大缩短了横摆角速度调整的稳定时间。
6 结 语
路面附着系数会影响车辆的操纵性,提出并设计了一种基于路面带双调整因子的EPS模糊灰预测控制系统,并且根据助力电流的变化实时调节预测步长。利用S形分布目标函数表达路面附着系数对助力电流的影响关系,使用钟形目标函数实现模糊控制器参数自调整功能。
通过MATLAB和CarSim联合仿真,模糊灰预测控制EPS在低附着系数路面能有效抑制横摆角速度的超调量,提高驾驶员路感;在高附着系数路面上行驶时,能有效缩短横摆角速度调整的稳定时间,超调现象也得到较好控制,提高了车辆转向行驶时的操纵性能。