一种轮腿复合式仿生机器人设计
2018-10-20迟志康宋欣杨磊
迟志康,宋欣,杨磊
一种轮腿复合式仿生机器人设计
迟志康,宋欣通信作者,杨磊
(天津农学院 工程技术学院,天津 300384)
针对极端非结构化工作环境下对移动机器人的使用需求,提出了一种轮腿复合式仿生机器人的设计方案,能够根据地形条件变换成六足和轮式两种移动模式,使其在移动过程中能够兼具良好的机动性能和越障能力。通过机械结构和控制系统设计,实现了机器人在移动过程中轮/腿运动模式切换和行走功能。经过对其工作空间的理论计算和物理样机行走实验测试,证明该机器人具备一定的行走能力和越障能力。
轮腿复合式;仿生机器人;控制系统;工作空间;三角步态
当前,随着机器人技术的飞跃发展,在救援抢险、考古探测、星际探索、军事战争和反恐行动中越来越多地出现了移动机器人的身影。它们代替人类进入到高危环境,甚至是人类无法达到的区域完成救援、侦查、设备检测和信息采集等作业任务,极大地拓展了人类的可达空间,为人类克服极端恶劣环境,探索未知世界提供了强大的技术支持[1-2]。
按照移动方式划分,移动机器人可分为轮式、履带式和多足步行仿生式[3]。其中,轮式机器人主要适用于车轮半径大于地面不平度这种相对较为平坦的地形,具有移动迅速和噪声低的优点。相对于轮式机器人,履带式机器人地形适应性稍强,可用于较为松软的崎岖路面,但对于山路或废墟等障碍物突出的地形条件,则暴露出其机动性差,移动速度慢和噪声大的缺点。多足步行仿生式机器人是依据仿生学原理,模仿昆虫身体结构和运动特性而设计的[4],其运动轨迹是一系列离散的点,相比于轮式和履带式的面接触方式,这种点接触地面的方式对地貌的破坏程度要小,而且针对崎岖地形可以选择最优的支撑点,无需连续的路径来支撑机器人本身,因而具有更强的越障能力和运动灵活性,对于复杂多变的非结构化地形条件具有更强的适应性。多足步行机器人典型结构主要有双足、四足、六足和八足4种,一般来说,足数越多,机器人的移动稳定性就越强,而且在其中一条腿损坏或者踏空的情况下依旧能够调整姿态,确保运动的平稳性。此外,冗余的腿还可以充当机械臂使用,拓展了机器人的功能和应用范围。但过多的冗余结构也会大大增加机器人结构及其控制方法的复杂性[5]。
综合考虑各类移动机器人的优缺点,本文提出一种轮腿复合式仿生机器人的设计方案,能够根据地形条件变换成六足和轮式两种移动模式,兼具良好的机动性能和越障能力,从而对复杂多变的非结构化工作环境具有更好的适应性。
1 轮腿复合式仿生机器人的结构设计
1.1 腿部结构设计方案
该仿生机器人躯干采用六边形结构,六条腿沿圆周对称分布,多个对称面可以使机器人拥有更多的前进方向,并可实现零半径转弯,相比于矩形身体结构有着更强的转向灵活性[6]。机器人腿部结构设计仿照昆虫的步行足结构,如图1所示,昆虫的步行足由基节、转节、股节、胫节和跗节5部分构成,节间由膜相连,可实现一定角度范围内的转动[7]。昆虫在行走时跗节与地面接触,增加腿部与地面的附着力,但并不起到支撑作用,整个身体是由其余4节负责支撑,而这4节中转节部分处于基节和股节之间,比较短小。因此,在遵循昆虫腿部原型特征的基础上,将仿生机器人的腿部设计为3节结构,分别为基节、股节和胫节(图2),基节与躯干通过腰关节相连,基节与股节间通过髋关节相连,股节与胫节间通过膝关节相连。其中髋关节与腰关节的轴线相互垂直,与膝关节的轴线相互平行。
仿生机器人样机模型如图3所示,每条腿有3个转动关节,即6条腿总计有18个转动副,每个转动副有1个自由度。每条腿的足部与地面间可以呈任意角度接触,且不发生滑动,可以视为拥有3个自由度的球面副,6条腿总计6个球面副。根据Kutzbach-Grübler空间机构自由度计算公式[8]:
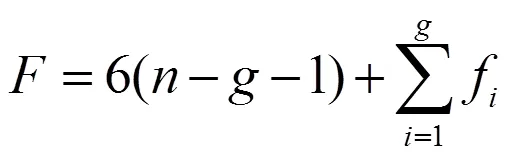
式中,为自由度数;为机构中构件数;为运动副数量;f为第个运动副的相对自由度数。因此,六足仿生机器人的总自由度为:

由此可知,六足仿生机器人是一个具有六自由度的空间并联机构,其18个转动关节分别由舵机驱动,驱动数量为18,超过了机器人的总自由度数,说明该机构具有冗余自由度。冗余机构的优势在于能够在运动控制中实现对关节角速度、角加速度、关节力矩的最小化,达到节约能耗的目的,而且工作空间不受奇异点限制,更有利于实现避障。
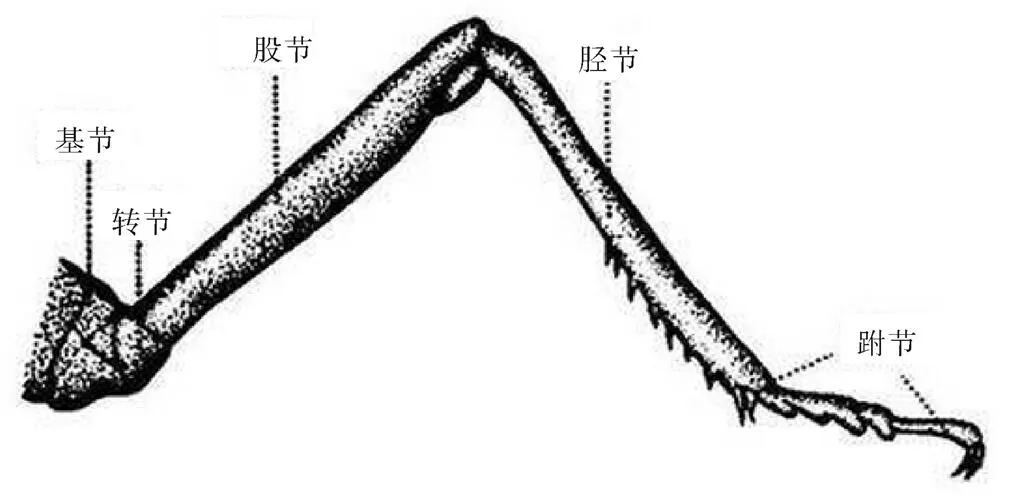
图1 昆虫的步行足结构
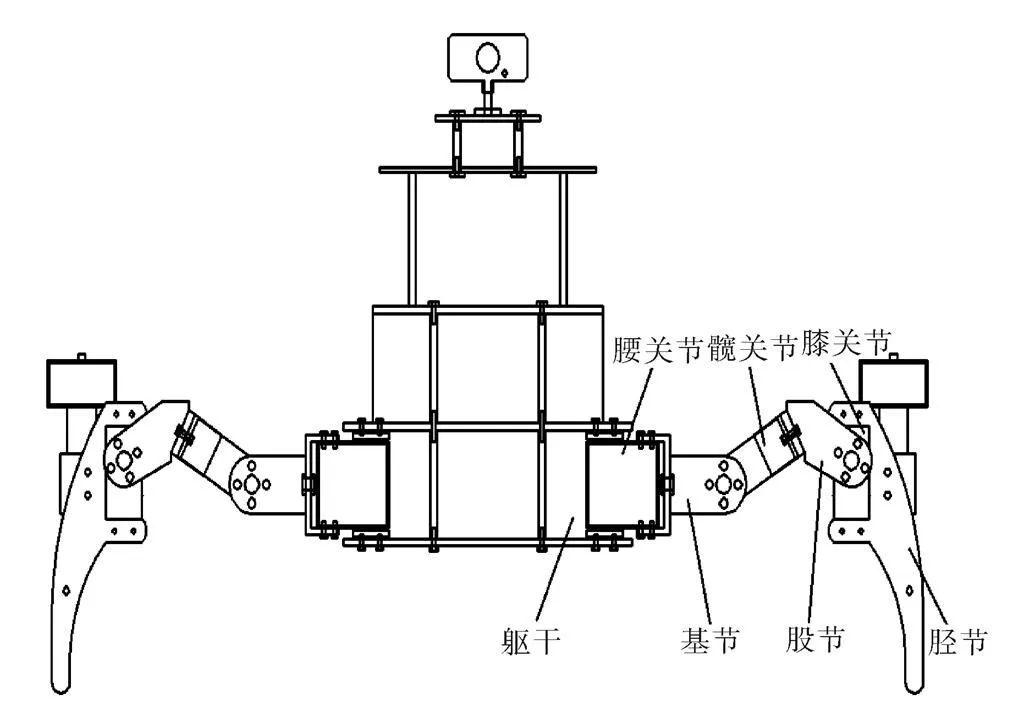
图2 轮腿复合式仿生机器人腿部结构示意图
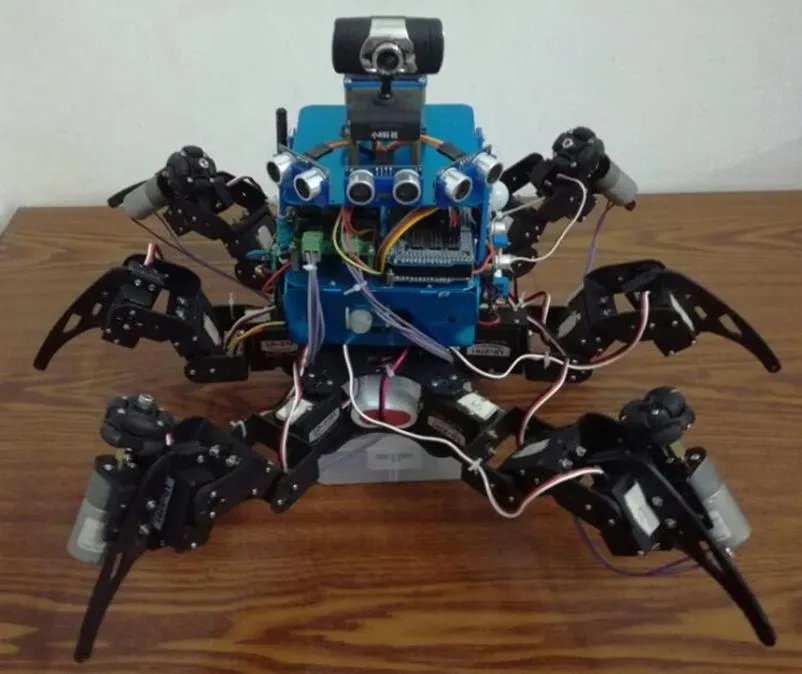
图3 轮腿复合式仿生机器人样机-六足模式
1.2 轮式结构设计方案
在仿生机器人躯干上沿圆周对称分布的6条腿中选择对角线方向上的4条腿,分别在其胫节部位安装一个由直流减速电机驱动的全向轮。当这4条腿膝关节处的舵机驱动膝关节向内旋转90°时,胫节上的全向轮完全着地,如图4所示。同时,非对角线上的两条腿膝关节处的舵机驱动膝关节既可以向外旋转一定角度,呈上扬状态,也可以向内旋转90°,两种情况下,这两条腿的胫节都是完全脱离地面,不会影响机器人的移动。此时整个机器人仅由4个全向轮着地,从而实现了仿生机器人由六足向四轮模式的转化,如图5所示。此外,由于该仿生机器人机体质量较大,因此,在底盘下方中心位置可安装一个万向轮,起到辅助支撑的作用,改善4个全向轮的承载状况,如图4所示。在四轮驱动模式下,利用全向轮的结构特点,仿生机器人可以实现前进、后退、转弯、横行等多种移动模式,在平坦地面上具有良好的灵活性和机动性能。
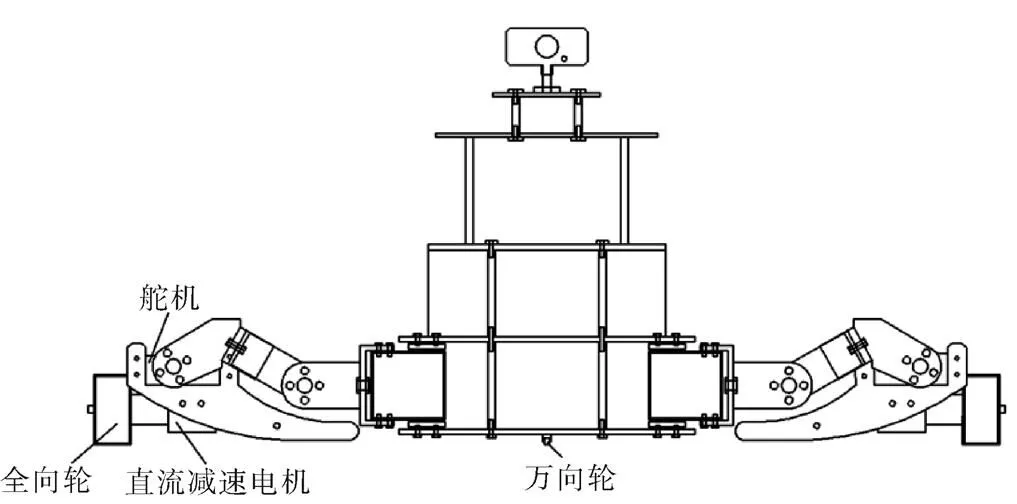
图4 轮腿复合式仿生机器人轮式结构示意图
2 轮腿复合式仿生机器人控制系统
轮腿复合式仿生机器人控制系统分为上位机和下位机两部分,如图6所示。其中,上位机用于接收下位机传送过来的姿态信息,通过姿态解算算法,进行机器人姿态闭环控制策略的计算,进而实现对机器人的步态规划,并向下位机发出各关节目标角度信息。下位机主要由Arduino控制器和IMU惯性传感器组成。Arduino控制器负责机器人机体姿态信息的处理,各关节角度信息的反馈和舵机(直流减速电机)控制指令的下达。IMU惯性传感器由3个MEMS加速度传感器、3个陀螺和解算电路组成,应用惯性原理和测量技术可实现对载体运动加速度、位置和姿态信息的采集。
仿生机器人六足模式下,18个关节分别由伺服舵机驱动,根据下位机的关节控制指令自动完成位置闭环控制,使其在行走中呈现不同的行走姿态。四轮模式下,由4个直流减速电机控制全向轮,实现轮式移动。
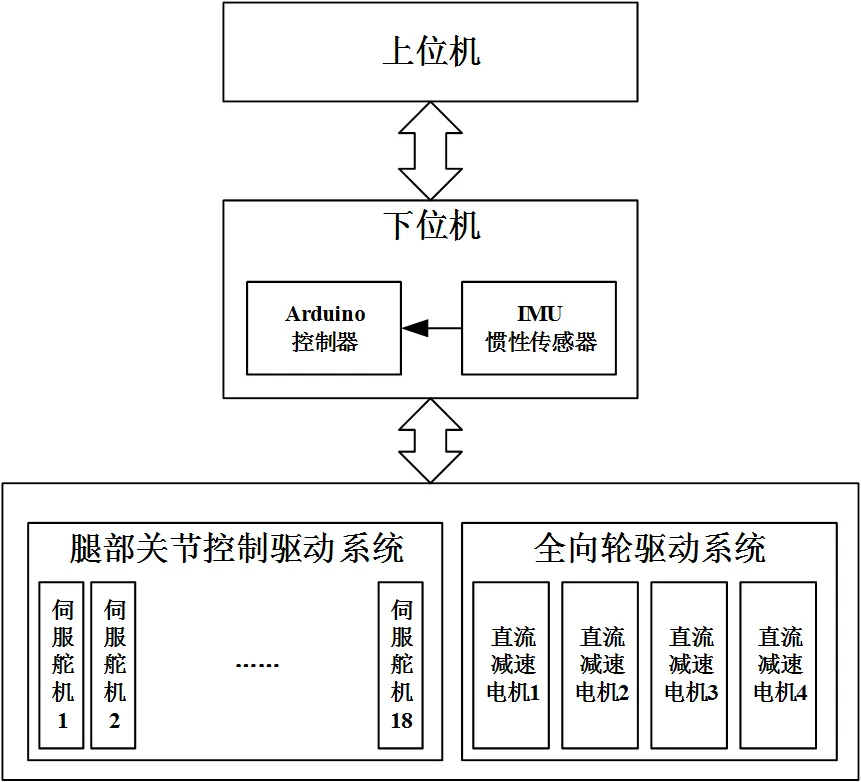
图6 轮腿复合式仿生机器人控制系统组成
3 轮腿复合式仿生机器人工作空间分析
轮腿复合式仿生机器人的6条仿生腿结构尺寸完全一致,因此任选其中1条腿进行运动学分析。将单条仿生腿看做一个三连杆串联的机械臂,当已知该条腿各关节的转角信息后,通过正运动学计算即可得到足端的位置向量,从而分析出单腿的工作空间,为腿部结构尺寸的设计提供参考依据。
3.1 D-H模型构建
如图7所示,分别在腰关节、髋关节、膝关节和足端建立坐标系,其中,腰关节处为基坐标系。腿部D-H参数如表1所示。
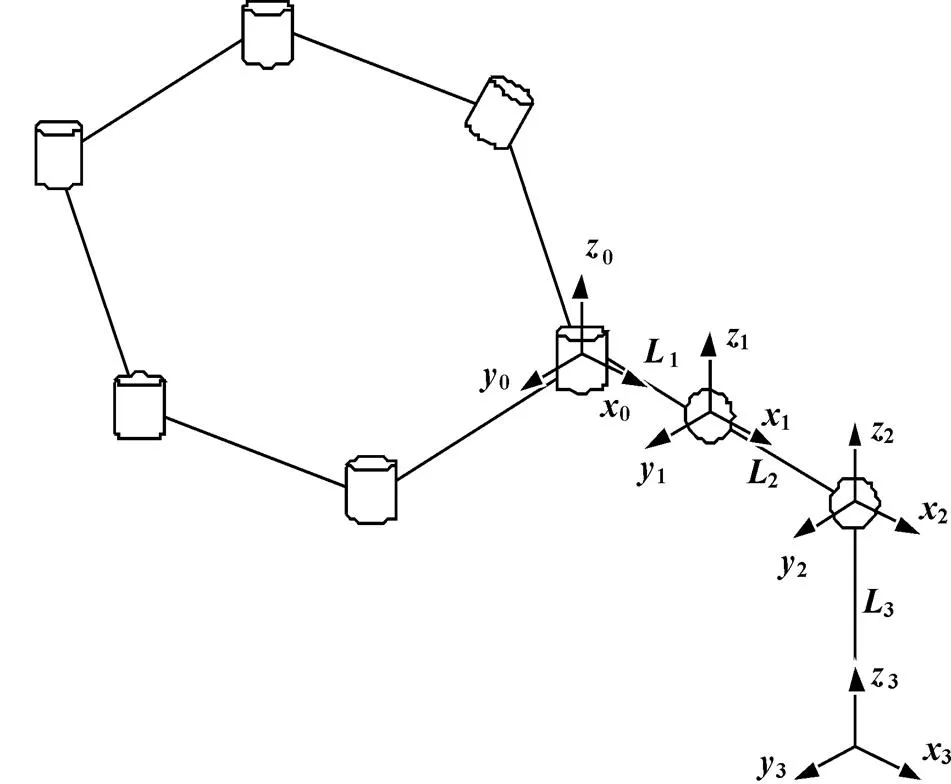
图7 腿部关节坐标系
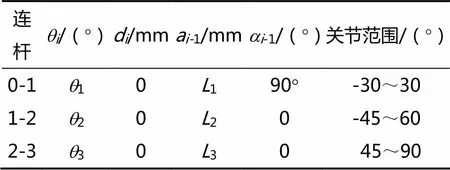
表1 腿部D-H参数表
3.2 正运动学计算
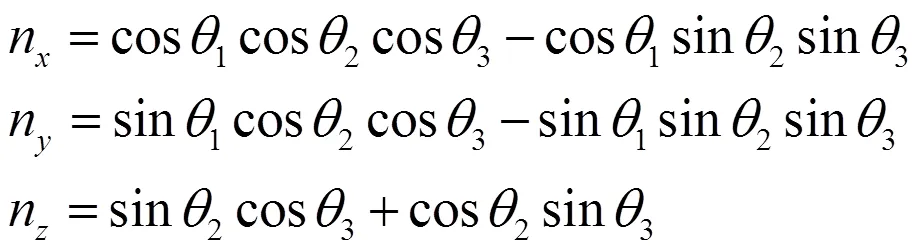
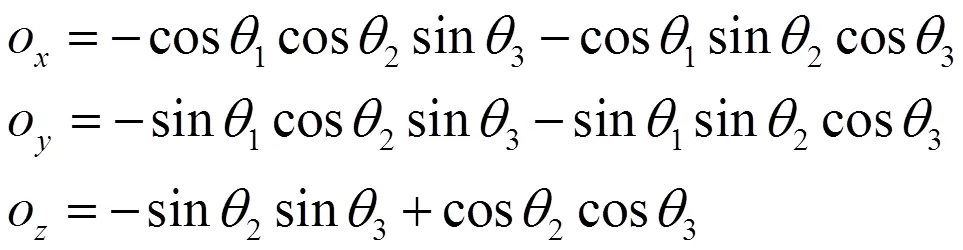
根据D-H参数表和相邻两个关节的变换矩阵(公式3),得到单腿正运动学方程及足端的期望位姿,如公式4所示。

(4)
其中,基坐标系姿态向量分别为:
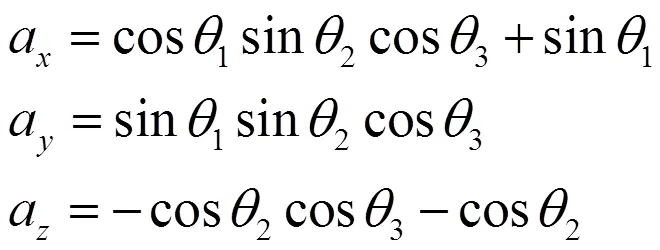
足端位置向量为:


3.3 工作空间分析
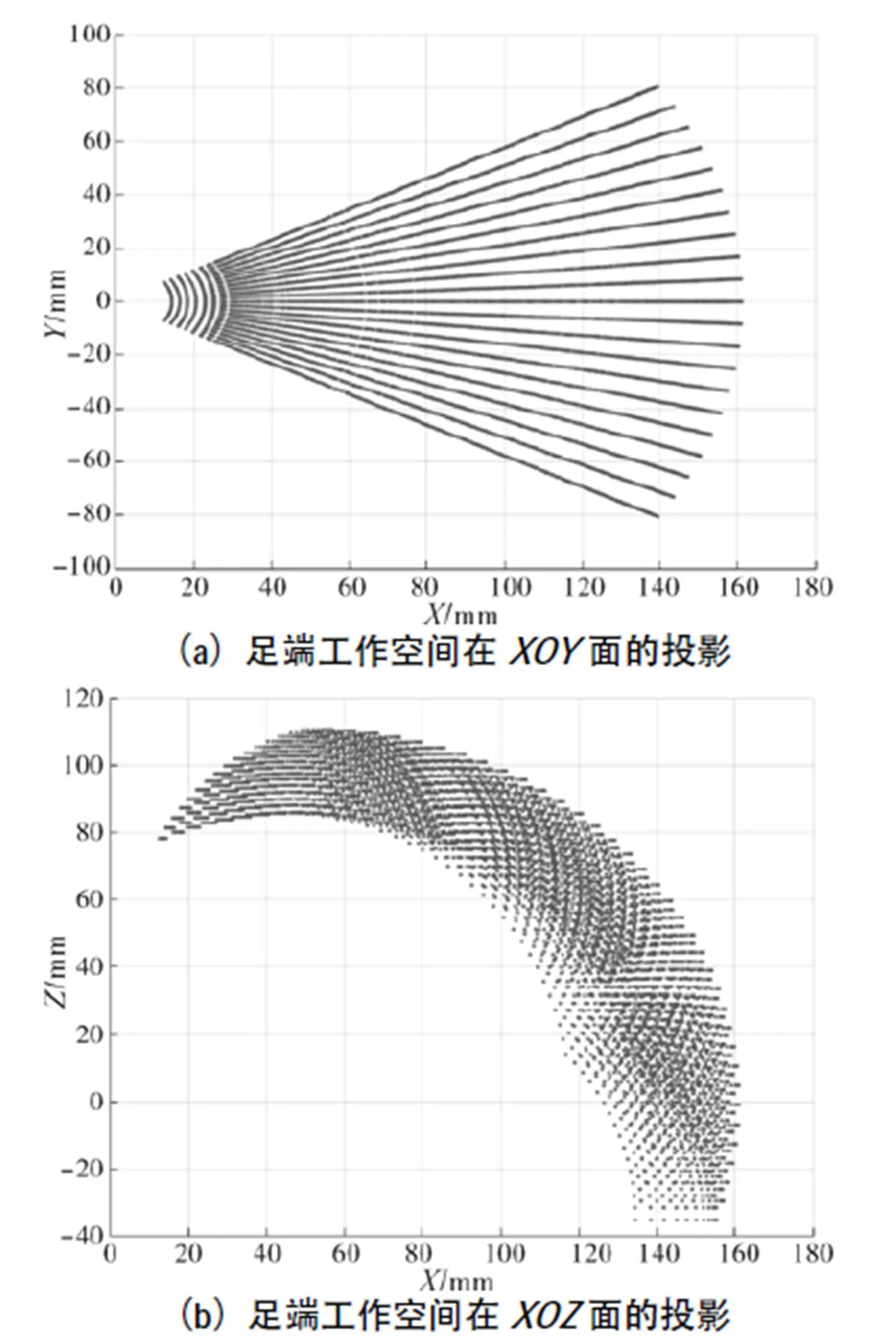
根据表2中所给出的仿生腿主要结构参数,利用Matlab绘制出单条仿生腿足端工作空间的散点图,如图8所示。(a)~(d)分别表征了足端工作空间在、、方向和三维空间中包络面的大致形态,即所有足端可达位置集合,该结果可作为衡量机器人越障能力的依据。从图8可以得到,该机器人仿生腿的最大跨度(方向)约为140 mm,最大步长(方向)约为150 mm,最高抬腿高度(方向)约为110 mm。
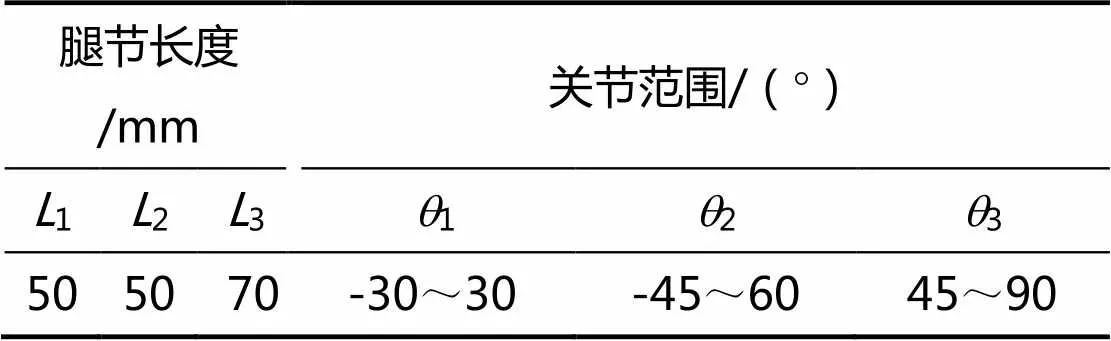
表2 仿生腿主要结构参数
4 轮腿复合式仿生机器人行走实验
根据前文所述的设计方案,制作了仿生机器人的物理样机,分别对其进行了轮足两种行走模式的切换,六足模式下的行走步态和越障能力的测试实验。
图9为轮足两种行走模式切换实验的视频截图,其中图9(a)为准备切换状态,图9(b)为切换完毕,整个过程所用时长为3 s。

图9 轮足行走模式切换
图10为六足模式下行走步态的测试实验,行走步态模仿“六足纲”昆虫步行时三角步态,该步态具有速度快,灵活性高,且运动平稳的特点[9]。为了方便观察步态,将机器人样子上半部分搭载的外设全部去掉。图10(a)为准备行走状态。图10(b)为1、3、5号腿为摆动腿,2、4、6号腿为支撑腿,由髋关节驱动改变仿生腿足端高度,腰关节驱动使机器人向前完成一个步长,这一过程中要保证机器人重心在支撑平面上的投影能够落在3个支撑点所形成的三角形中。图10(c)为2、4、6号腿为摆动腿,1、3、5号腿为支撑腿,使机器人向前完成一个步长。在这两种状态中,两组仿生腿的摆动方向相同。通过上述过程循环反复即可完成仿生机器人的纵向行走;如果摆动腿是在髋关节和膝关节的驱动下,其摆动方向变为向两侧运动,此时通过1、3、5号腿和2、4、6号腿的交替动作即可完成仿生机器人的横向行走;如果摆动腿是在腰关节的驱动下摆动,但不向前迈步的情况下,通过1、3、5号腿和2、4、6号腿向相反方向摆动,即可完成仿生机器人的转向。

图10 三角步态行走
图11为仿生机器人越障能力测试实验。在地面上放置高度为62 mm,宽度为480 mm的木板,经测试,该机器人能够顺利通过此障碍,证明其具备了一定的越障能力。
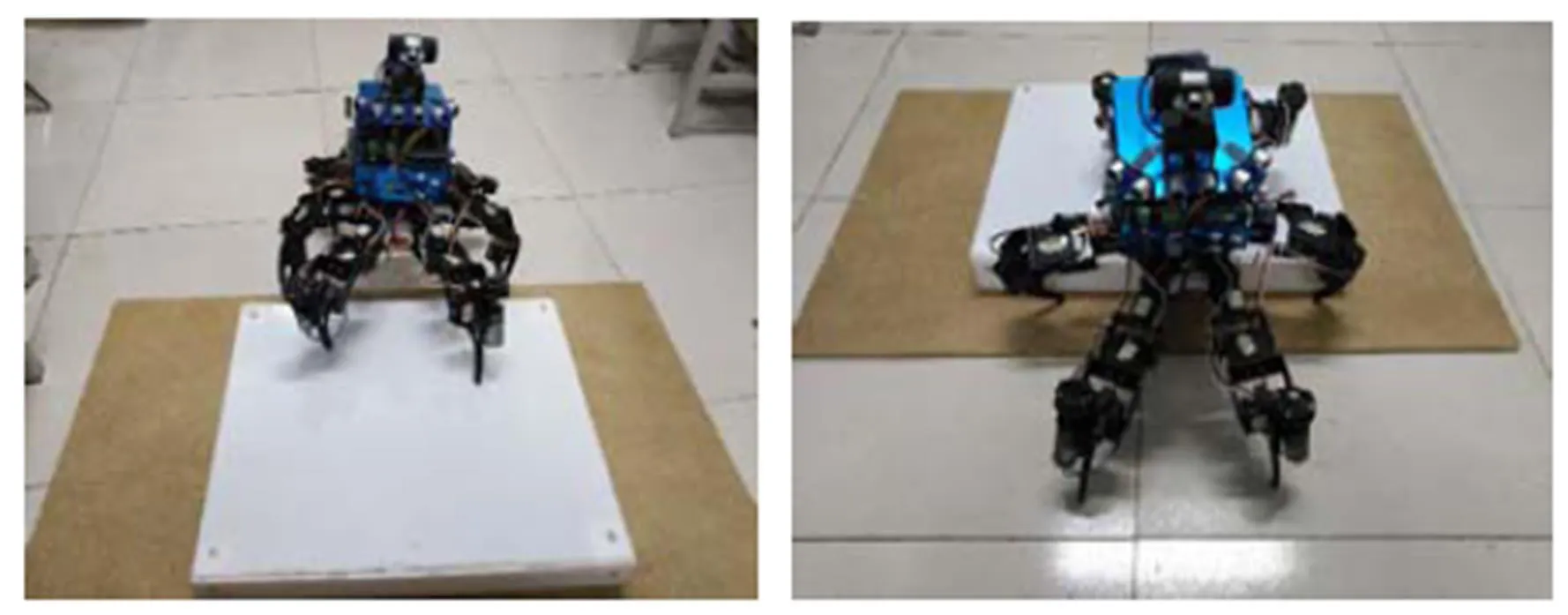
图11 越障能力测试
5 结论
本文提出了一种轮腿复合式仿生机器人的设计方案,兼具了六足和轮式两种移动机器人的特征,在移动过程中可通过轮/腿两种模式的切换,提高其移动的机动性和对复杂地形的适应性。经过对机器人工作空间的理论计算和行走实验测试,表明该机器人具备了一定的行走能力和越障能力,但后续还需要对其进行深入的结构优化设计、步态规划和行走稳定性研究,以提高其移动的高效性和平稳性。
[1] Wu W R,Liu W W,Qiao D,et al. Investigation on the development of deep space exploration[J]. Science China(Technological Sciences),2012,55(4):1086-1091.
[2] 黄俊军,葛世荣,曹为.多足步行机器人研究状况及 展望[J].机床与液压,2008,36(5):187-191.
[3] 李磊,叶涛,谭民,等.移动机器人技术研究现状与未来[J].机器人,2002,24(5):475-480.
[4] 王国彪,陈殿生,陈科位,等.仿生机器人研究现状与发展趋势[J].机械工程学报,2015,51(13):27-44.
[5] 尹晓琳. 六足仿生机器人步态规划及其控制策略研究[D].哈尔滨:哈尔滨工业大学,2013.
[6] Chu S K K,Pang G K H. Comparison between different model of hexapod robot in fault-tolerant gait[J]. IEEE Transactions on Systems,Man,and Cybernetics,2002,32(6):752-756.
[7] Gullan P J,Cranston P S. 昆虫学概论 [M].3版.彩万志,译.北京:中国农业大学出版社,2009.
[8] Kutzbach K. Mechanische leitungsverzweigung,ihre gesetze und anwendungen[J]. Maschinenbau,1929,8(21):710-716.
[9] 叶献伟,陈樊,高建华.六足仿生机器人越障步态方法研究[J].浙江理工大学学报,2008,25(5):611-614.
责任编辑:杨霞
A wheel-legged biomimetic robot design
CHI Zhi-kang, SONG XinCorresponding Author, YANG Lei
(College of Engineering and Technology, Tianjin Agricultural University, Tianjin 300384, China)
For the mobile robot used in extremely unstructured working environment, a design schemeof wheel-legged biomimetic robot was proposed in the paper. Six-foot and wheel mode could be changed according to the terrain condition, so the good mobility and obstacle performance were obtained during the movement. Through the mechanical structure and control system design, the wheel/leg motion mode switching and walking for the robot was realized during the movement process. After theoretical calculation for the working space and experimental testing for physical prototype walking, it was proved that the robot has a certain ability to walk and overstep.
wheel-legged; biomimetic robot; control system; workspace; tripod gait
1008-5394(2018)03-0087-05
10.19640/j.cnki.jtau.2018.03.019
TP242.6
A
2018-04-08
国家自然科学基金(51305299);天津农学院高校教师教育改革创新引导发展项目(20170502)
迟志康(1995-),男,本科在读,研究方向:农业机械化及其自动化。E-mail:779373274@qq.com。
宋欣(1979-),女,副教授,博士,主要从事智能农机装备方面的研究。E-mail:songxin-tju@163.com。
