基于半导体制冷片的恒温控制系统的测试与仿真
2018-10-19宋炳辉冯叶磊管振栋
宋炳辉,冯叶磊,张 欣,田 恒,管振栋
(山东科技大学 机械电子工程学院,山东 青岛 266590)
1 引言
科技的发展,生活质量的提高,使人们对温度的关注度也越来越高;每天的天气情况,时刻影响着人们的日常生活;大棚里的温度,直接影响着蔬菜的产量;培养皿中的温度,直接影响着实验的成败;宇宙飞船上一个零件温度的正常与否,可能直接导致每次试飞的成功与否。因此,对温度控制的研究已经成为一个比较热门的研究课题[1]。
随着半导体的技术的发展,基于帕尔贴效应的新型固体制冷技术即半导体制冷,受到了人们的广泛关注[2]。半导体制冷是建立于塞贝克效应、珀尔帖效应、汤姆逊效应、焦耳效应、傅立叶效应共五种热电效应基础上的制冷新技术[3]。半导体制冷(Semiconductor Refrigeration)有制冷迅速、绿色环保、体积小、无噪音、低振动,坚固可靠,稳定性好等一系列优点,符合绿色环保要求,对国民经济可持续发展具有重要的战略意义[4]。
鉴于半导体制冷的优势,将其应用到小温控箱制冷的领域。本文利用半导体制冷设计了恒温控制系统,要求温度偏差在±1℃以内。并将实际运行结果与仿真情况进行对比分析。
2 控制系统组成
2.1 电源部分
本论文采取三种电压,分别为stm32开发板上所带的3.3V直流电压与5V直流电压,以及开关电源所提供的12V直流电压。其中,温度采集电路采用板载3.3V电压,LCD1602液晶屏和数码管采用板载5V电压,半导体制冷片供电电路供电的是开关电源的12V电压。
2.2 温度测量与当前温度的显示
利用stm32自带的AD采集热敏电阻的压降,再把热敏电阻的压降转化为热敏电阻的阻值,通过与热敏电阻真值表相对比,stm32会自动将其阻值转化为当前温度,并使用数码管进行显示。
2.3 对流经制冷片电流的控制
将利用PID算法计算得到的数据转换为芯片引脚所输出PWM波形的占空比,由它决定场效应管的通断与输出电流的大小,实现了对制冷片电流的间接控制。当温度高于我们的设定值时,制冷片会工作,当温度低于或等于我们的设定值时,制冷片会停止工作。利用PID算法可以快速而且准确的达到设定温度。
2.4 按键与设定温度的显示
用两个按键来控制我们所设定的温度,按下按键1,设定温度就会升高1℃,按下按键2,设定温度就会降低1℃。设定温度会被显示在LCD1602液晶屏上。
3 系统软件设计
当本系统上电启动后,首先会进行系统的初始化,芯片上电或复位后,进入主程序,系统程序采用C语言编写,软件采用模块化设计,包括初始化模块(对IO口、定时器等进行初始化)、显示模块、按键模块、定时器模块、温度采集模块、PWM输出模块、PID模块等。其中在PID算法模块中设置了设定温度初始值为10℃,之后可以通过按键来调节温度的设定值。系统程序流程图见图1。

图1 流程图
4 系统测试与SIMULINK仿真
4.1 SIMULINK仿真
仿真模型如图2所示。
Cooling模块分解如图3所示
经过多次仿真,发现PID参数P、I、D分别设置为17、0.4、0能够满足本系统需求,仿真结果如图4所示。
4.2 系统测试
本论文使用的制冷设备如图5所示,散热片两侧为风扇,两风扇型号一致,安装方向一致,吹风方向均为从左往右。
运用仿真时所采用的PID参数,每0.5秒采集一次箱体内温度,实验结果如图6所示。
随着时间的推移和家长的“更新换代”,班级群也从个别家长与老师的沟通渠道,逐渐演变成家长们的“菜市场”。
4.3 结果对比与分析
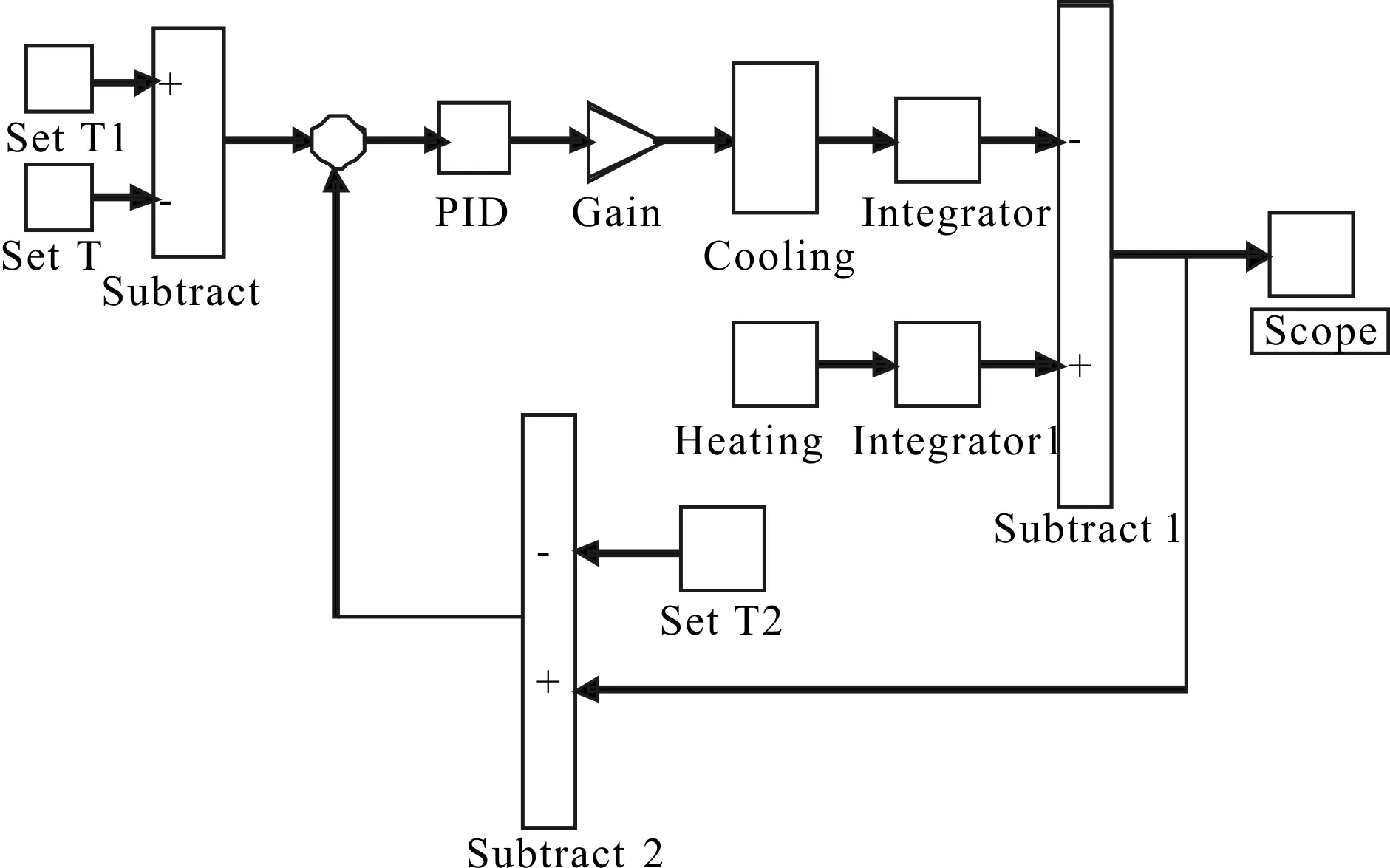
图2 SIMULINK仿真图
单位时间内,在均匀金属中沿某方向的不可逆的热传导过程叫做傅立叶效应。该效应的关系式为某垂直方向的面积与该方向上温度的梯度差之间的乘积成正比:
Qk=kS(Th-Tc)/l=K△T
(1)

图5 实验图
式中:k、K—该导体所具有的热导率以及总热导;
Th—半导体热端温度;
Tc—半导体冷端温度[5]。

图3 Cooling模块分解图

图4 仿真结果图

图6 实验结果图
仿真结果将温度控制在20℃,最终趋于平稳状态。实验结果将温度控制在20℃,偏差在±1℃,也能够满足本论文的前提条件。但由于本实验所采用的保温盒的保温性存在不足,电路信号的干扰、传感器的滞后性以及电流太小导致所监测的温度波动有点大,下一步会针对这些方面采取具体的应对措施,使其更接近仿真效果。
5 结论
基于半导体制冷片完成了对恒温控制系统的设计,仿真对比结果有所差异,但在情理之中。对其运行状态下的温度控制进行了实验研究,得到了主要结论如下:
(1)本系统对箱体内温度控制的偏差在±1℃以内,满足了本论文的前提要求。
(2)本系统对温度的实际控制结果与MATLAB仿真结果大体一致,存在一定的误差,但与我们所分析的结果相一致。验证了图2的正确性。