基于迭代学习控制的原子力显微镜成像
2018-10-18邹见效
李 丹,邹见效
(电子科技大学自动化工程学院 成都 611731)
纳米科技已成为科学研究的一个热点,纳米检测是纳米科技必不可少的手段。作为一种具有原子级分辨率的新型表面分析仪器,原子力显微镜(AFM)已成为纳米检测的一大利器。自1986年问世[1],经过30多年的发展,AFM已经能够对原子级的物理或化学特性进行观测和研究,被广泛应用于材料、生物和半导体等诸多科研和工程领域[2-5]。
纳米领域各项技术的迅速发展也对AFM的性能提出越来越高的要求,需要更高的成像精度,更快的工作速度和更好的操作鲁棒性。如观测生物细胞(特别是癌细胞)等生理性软质材料的纳米特性时,观测样本必须置于液体环境中,液体环境的不稳定性要求AFM具有更精确的定位精度和更好的鲁棒性[6]。然而,由于扫描驱动机构的非线性等因素,AFM的成像精度仍然是制约其推广应用的一大瓶颈。通过采用更先进的硬件技术(如探针制造技术[7]、高精度传感器等)和进一步的后期图像处理可以在一定程度上提高AFM的成像精度,但较大地提高了系统的成本和应用范围。在不改变系统硬件的情况下,通过设计先进控制算法克服扫描驱动机构非线性及外界环境干扰带来的不利影响,提高定位精度是当前的研究热点。传统PID控制通过高增益反馈可以有效地消除压电驱动器迟滞和蠕变的特性,但是压电驱动器的低阻尼结构将导致系统增益裕度减小,影响系统稳定性。文献[8]提出了一种PID参数自调整的控制方法,通过调整系统增益可以在一定程度上提高系统带宽,却并没有从根本上解决问题。文献[9]提出了一种基于模型的前馈与反馈相结合的方法,基于Prandtl-Ishlinskii模型对压电陶瓷的迟滞、蠕变特性进行补偿,避免了高增益反馈带来的振动特性,但会引入因为模型不完全而出现的控制误差。
本文基于迭代学习算法设计了一种AFM水平面内的扫描成像控制器,利用ILC的记忆与修正机制对控制输入不断进行修正,以获得理想的控制性能。仿真结果和实际系统成像实验显示该控制方法可在有限个迭代周期后达到理想的响应输出,明显改善AFM系统的成像精度,获得更高质量的AFM成像。
1 系统描述
1.1 基于AFM的纳米测量
如图1所示,AFM由探针、压电扫描器、激光发生器及激光检测装置组成。AFM基于探针尖端原子与样本表面原子间的作用力进行成像[10]。接触模式下,探针针尖原子与样本表面原子足够接近时,两者间产生作用力(吸引力或排斥力),搭载探针的微悬臂在原子间力的作用下产生形变。激光发生及检测装置用于检测此形变,激光由激光发生器产生,经微悬臂上的微反射镜反射,进入光电检测装置。当针尖与样本的距离Z发生变化,将引起光电检测器接受到的光点发生偏离。其偏离量和偏离方向通过控制系统驱动压电扫描器带动样品在z轴方向上做出微调ΔZ,使针尖与样本间距离继续保持恒定的设定值Z0。压电扫描器的微调信息ΔZ经图像系统处理可得样品表面的形貌信息。
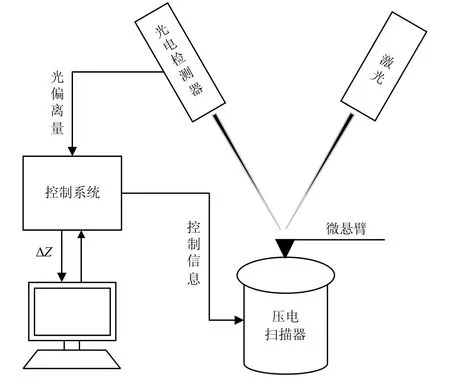
图1 AFM系统结构
水平方向上,压电扫描器在控制器的作用下带动样品在x、y轴两个方向上做扫描运动,使针尖在样品表面完成重复光栅式扫描,运动路径如图2所示。即y轴上重复快速地跟踪三角波轨迹,x轴上则相对缓慢地跟踪斜坡轨迹。
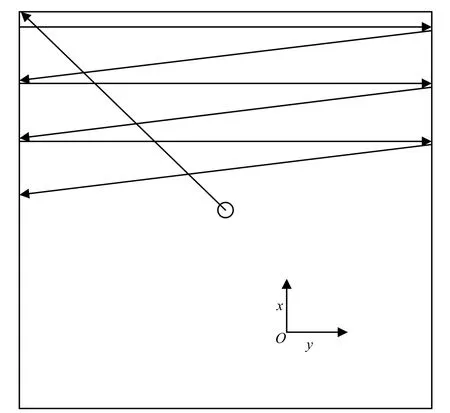
图2 AFM水平方向扫描轨迹
1.2 成像的不利因素
现行AFM普遍采用压电驱动器作为扫描驱动机构,压电驱动器存在迟滞、蠕变和振动3种非线性特性[11-12]。迟滞特性表现为压电驱动器的输出位移与输入电压成非线性关系,当前输出位移不仅与当前输入电压有关,还决定于输入电压历史值,这是导致扫描形貌失真的重要原因。蠕变特性表现为压电驱动器对突变输入电压的响应,有两个阶段:输出位移先快速达到一定值,然后在压电驱动器的剩余极化影响下缓慢达到稳定值。蠕变特性会使压电驱动器的位移响应误差增大,影响AFM的定位精度。振动特性是由于压电驱动器具有比较低的结构阻尼,当其工作在谐振频率附近时,会产生自激振动。
除此之外,AFM系统的动态特性严重依赖操作条件,对外部环境的干扰十分敏感,而且可能随时间发生变化。常见的外部环境干扰如样品表面的毛细力[13]、隔振平台遗留的外部振动等。
2 ILC控制器设计
AFM成像需要实现x、y、z轴3个方向上的精确运动控制。其中,水平平面内的运动控制要克服压电驱动器迟滞、蠕变等非线性特性以及外部环境中的干扰,实现x、y轴两个方向上对既定扫描轨迹的精确跟踪。迭代学习控制(ILC)是一种可以在有限时间内实现完全跟踪任务的控制方法[14],采用“在重复中学习”的学习策略,具有记忆和修正的机制,可以充分利用系统的先验知识和前周期的控制经验对当前控制输入进行修正,以获得收敛理想的输出。本文将迭代学习控制应用到x、y轴两个方向的扫描运动控制中,设计一种基于迭代学习算法的AFM扫描控制器,可获得较好的控制效果。
2.1 硬件设计
出于研究阶段便于观察实验结果以及进行参数调节的考虑,所设计ILC控制器采用基于MATLAB xPC Target的半实物仿真系统。硬件结构如图3所示,主要由AFM(本原CSPM5500 SPM)的信号访问接口、A/D和D/A数据采集卡、宿主机以及目标机组成。其中,数据采集卡选用NI PCI 6259系列,MATLAB中已集成NI PCI 6259驱动模块,利用Simulink可以方便地调用。宿主机上需要MATLAB、Simulink、RTW、xPC Target及C编译器的支持,目标机上不需要任何软件环境。宿主机与目标机间通过TCP/IP协议进行通信。在实际控制过程中,宿主机上Simulink建立的ILC控制模型通过RTW编译为可执行代码,下载到目标机上执行,并与数据采集卡进行数据交换。相应地,AFM的输出经模数转换由目标机传输给宿主机进行存储。

图3 ILC控制器硬件结构
2.2 算法设计
控制器软件部分由4个模块组成:数据采集模块、数据输出模块、ILC控制算法模块、通信模块。其中,数据采集模块控制数据的采集,完成控制输入及其响应输出的A/D采集;数据输出模块控制数据的D/A输出;ILC控制算法模块用于实现ILC控制算法;通信模块主要定义宿主机与目标机之间的通信接口。
图4给出了ILC控制算法模块的基本结构[15],图中系统输入为u(j)ω,输出为y(j)ω(yl(j)ω为线性输出,yn(j)ω为非线性输出),系统期望输出为yd(j)ω,下标k表示迭代周期。ILC学习过程为:
1)设置第一个运行周期输入u0(j)ω。2)获得当前运行周期的输出判定是否精确跟踪yd(j)ω。是,学习结束;否,进入步骤4)。4)计算下个运行周期输入转入步骤2)。
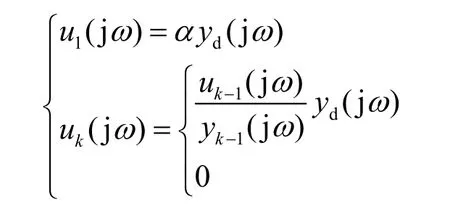
考虑到AFM的动态响应严重依赖操作条件,而且可能随时间发生变化的情况,建立一个精确的AFM动态模型在实际操作上难以实现。本文ILC控制器学习律采用MIIC算法[16],直接利用控制输入及其相应输出的比例关系计算新的控制输入不需要构建AFM系统的精确模型,避免了建模过程中拟合不完全导致的不利影响。
MIIC学习律为:

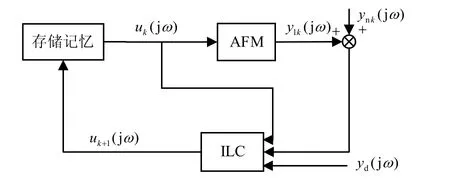
图4 ILC控制器结构图
3 MATLAB路径跟踪仿真及分析
为验证本文提出的基于迭代学习算法AFM控制器的有效性,对压电驱动器在水平面内的扫描运动进行了路径跟踪仿真研究。选定实验方向为y轴方向,由MATLAB xPC Target产生一组指定期望输出序列,以该序列对AFM(本原CSPM5500 SPM)压电驱动器在y轴方向进行激励,由数据采集卡(NI PCI 6259,采集频率:2.5 kHz)采集控制输入及其响应输出。仿真实验中分别使用开环控制、固定参数的PI反馈控制以及ILC控制进行控制并比较实验结果。
图5为压电驱动器分别在开环控制、固定参数PI控制及ILC控制下路径跟踪仿真结果及其误差的对比。其中,图5a、图5c、图5e为上述3种控制方法下输出轨迹与期望轨迹的对比(ILC控制下的图像为第4个迭代周期);图5b、图5d、图5f为相应的输出误差。比较图5中仿真误差可以看出,开环控制及PI控制下的压电驱动器对期望轨迹的跟踪效果不理想,跟踪精度较低,误差较大。采用ILC的压电驱动器在第4个迭代周期误差已经减小到了±5%以内,达到满意的效果。
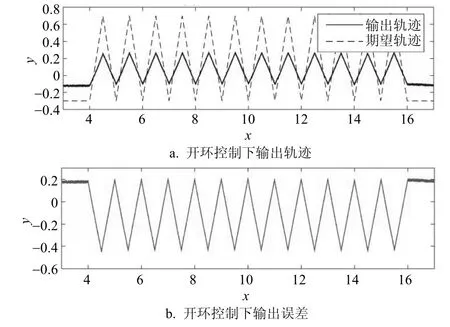

图5 路径跟踪仿真结果对比
本文利用相对二范数[17]对跟踪精度进行量化表征,相对二范数的概念为:

式中,yd(⋅)为期望输出序列;y(⋅)为实际输出序列;为该实际输出序列所对应的相对二范数。3种控制策略下所得实际输出与期望输出之间的相对二范数如表1所示。
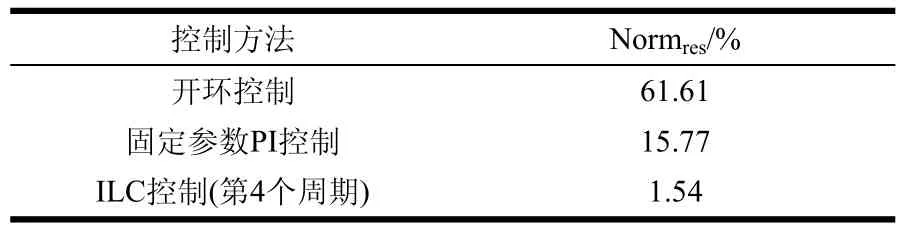
表1 相对二范数表
与开环控制和PI反馈控制相比,ILC控制下所得响应输出的显著较小且仅在第4个运行周期内达到1.54%,收敛速度较快,基本实现了对期望轨迹的精确跟踪。在AFM成像系统y方向上的往返扫描运动中,可以对所需往返扫描轨迹较快地达到较高的跟踪精度。
y方向上扫描路径跟踪仿真结果证明本文设计的基于迭代学习的AFM控制器可以有效地克服压电驱动器的非线性和外部环境的干扰,获得较优越的路径跟踪性能。
4 AFM成像实验及分析
为进一步验证理论分析和仿真研究的可信性,在实现水平平面内扫描运动路径精确跟踪的基础上,对本文设计的基于迭代学习的AFM控制器进行成像实验验证。
成像中样品选用铌酸锂单晶基片(LN, LiNbO3),其表面形貌如图6所示,呈光栅状。实验中AFM水平平面内由固定参数的PI反馈控制和ILC控制分别控制扫描运动。为保证实验变量唯一,z轴方向上均采用PI反馈控制器。实验中系统控制输入均由MATLAB xPC Target产生,控制输入及响应输出由数据采集卡(NI PCI 6259,采集频率:2.5 kHz)采集。
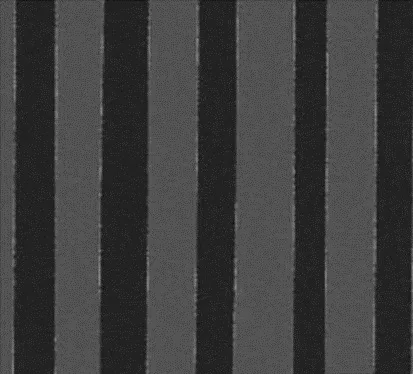
图6 路径跟踪仿真结果对比

图7 AFM成像形貌对比
图7 为固定参数PI控制和ILC控制下AFM成像的样品表面形貌(ILC控制下的形貌为第3个周期)。其中,图7a、图7c分别为两种控制方法下所得二维图,图7b、图7d为三维图。从图7a、图7b中可以明显判断出LN表面的光栅形貌,但是图像上存在着较多的尖刺,严重干扰观察,且二维图中狭缝界限清晰度差,说明在PI控制下,AFM成像中对外部环境干扰的消除不理想,严重影响成像的质量。图7c、图7d中狭缝界限清晰,三维图中未出现显著干扰观察的尖刺信号。经过验证,本文设计基于迭代学习的AFM控制器可以显著改善成像质量,获得较为优越的成像性能。
5 结束语
本文设计了一种AFM水平面的成像扫描控制器,改善了AFM系统的成像性能。针对AFM中压电驱动器非线性和外部环境干扰带来的不利影响,利用迭代学习记忆和修正的机制,充分利用系统的先验知识和前迭代周期的经验对控制输入进行修正,实现对期望轨迹的精确跟踪。路径跟踪仿真表明该控制器可以在较短时间内有效地实现对AFM水平平面内往返式扫描轨迹的精确跟踪;实际系统成像实验表明该控制器可以有效克服压电驱动器非线性和外部环境干扰带来的不利影响,显著提高原子力显微镜的成像精度,获得了较高的成像质量。
