基于多中继散射组网的时钟恢复方案
2018-10-18,,
, ,
(中国电子科技集团公司 第五十四研究所,石家庄 050081)
0 引言
一般情况下,为了节省信道资源,发送端只发送数据信号而不发送同步时钟信号,所以在接收端就必须通过时钟恢复算法来提取同步时钟信号。由于散射信道具有高误码率,通过接收到的数字信号恢复的原始时钟存在时钟抖动,尤其在多中继的散射信道中时钟抖动将会累加,严重情况下会导致最远端接收机时钟失锁,造成通信系统中断[1]。并且近年来信息传输速率越来越高,高速码流本身存在严重的码间干扰,再经过多中继后接收情况将更加恶劣,所以急需一种新的时钟恢复算法来解决在散射衰落信道中多中继传输的时钟恢复问题[2]。
本文所提出的时钟恢复方案应用于准同步复接设备,所以在此给出准同步复接系统中的时钟恢复模型如图1所示。利用全数字锁相环恢复时钟的原理是根据输入信号和本地估算时钟的相位误差对本地估算时钟的相位进行连续不断的调整,从而达到本地估算时钟的相位对输入信号的相位不断跟踪的目的。全数字锁相环由数字鉴相器,数字环路滤波器和数控振荡器(NCO)三部分组成。数字鉴相器用于检测业务时钟和本地时钟之间的相位误差,当定时准确时,检测器的输出为零;当定时超前时,检测器输出正误差信号;当定时滞后时,检测器输出负误差信号;环路滤波器用于调整误差信号,进而驱动NCO产生定时信号。

图1 时钟恢复模型
1 传统码速调整定时恢复方案
根据准同步复接器的码速调整过程可以直接推导出一种时钟传输方法[3],即在分接器接收端,通过观测接收FIFO数据量大小的方法,实现对发送端业务码流时钟的恢复。具体实现原理如图2所示。

图2 传统码速调整定时恢复方案
在复接端,异步输入码流首先进入先进先出缓冲器(first in firstout,FIFO)中,“正/负码速调整成帧控制电路”则负责生成帧头、帧体和其它帧结构字段,帧体的内容是读取FIFO缓冲的输出,从而把异步输入码流传输至信道。因为复接器本地时钟和异步输入码流时钟不相关,仅在标称值上相等,实际两个时钟具有一定容差,所以若不采取任何措施,FIFO最终会出现读空或写满溢出现象,造成信息传输损伤。准同步复接则采用码速调整方案,复接器在要发送一帧数据的起始时刻观测当前FIFO中的数据容量,以FIFO总容量一半大小为门限,超过此门限时就多发送一比特,低于此门限时就少发送一比特,并用两种不同帧头来指示本帧传输信息量的多少。
在分接端,“正/负码速调整解帧控制电路”在帧已经同步时,会根据检测出帧头码型判断本帧业务净荷的大小,正确地将业务码流写入接收端FIFO缓冲[4]。“异步时钟恢复电路”工作在分接器本地时钟上,其作用是产生连续读取FIFO的时钟,即生成异步输出码流时钟,该时钟与复接端业务的异步输入码流时钟同频时,就完成了异步业务码流时钟恢复。分接器工作时钟与异步业务码流时钟亦是非相干,仅在标称值上相等,要生成同频时钟可采用一个频率受控定时NCO,根据接收端FIFO当前容量大小是否超过FIFO总容量的半值来控制定时NCO输出频率。可在接收端帧头位置处观测当前FIFO容量,大于总容量半值时则提升定时NCO输出频率,小于总容量半值时则降低定时NCO输出频率,调整控制定时NCO输出频率的增量使环路收敛,则定时NCO输出频率就锁定在发送端异步输入码流时钟上。
根据上述码速调整恢复定时的方法可看出,该方案是在复接和分接端构造了一个以发送端异步输入码流速率为分辨率的分布式锁相环[5]。此锁相环的鉴相精度为输入码流速率,鉴相频率为帧频。由于鉴相精度是输入码流速率,特别是在业务速率较低时(在本准同步复接系统中最低速率为64 kb/s,鉴相精度15.625 μs),以发送端异步输入码流时钟为基准,观测接收端分接器输出的码流时钟,将会达到至少15.625 μs漂移。接收端时钟相对发送端时钟相差输入码率下的一比特时长时,接收端锁相环才会感知该定时误差,然后快速锁定[6]。锁定后,又进入相对时钟漂移阶段,漂移幅度达输入码率下的一比特宽度。接收端时钟不仅存在相位漂移,还存在以分接器本地时钟为周期的抖动。抖动幅度与分接器本地时钟频率成反比关系。
经过上述分析,以码速调整为基础的时钟传输方案在中继数较小、接收端业务终端对时钟抖动和漂移要求不高的情况下,实现原理简单,业务开销较少,是一种可取方案。但是由于码速调整定时恢复方案鉴相精度为输入码流速率,收发时钟相位幅度差超过码率下的一比特宽度时,接收端分接器才能检测并生成新的定时误差,收发时钟间存在漂移—锁定—漂移—锁定的周期滑动现象。在系统存在多跳级联情况下,每跳均会引入中继链路时钟漂移和抖动[7-8],经系统要求的5跳无线信道和6跳光传输后链路时钟抖动会累积增大,严重情况下会导致最远端接收机时钟失锁,造成通信系统中断。
2 双环提取方案
在上一节介绍的基于码速调整的定时恢复方案定时误差分辨率低,若系统能够提高定时误差分辨率,可极大减小收发时钟间的漂移幅度,进而将漂移减小为时钟抖动。基于高定时相位误差分辨率的高精度定时恢复的复接与分接端原理如图3所示。
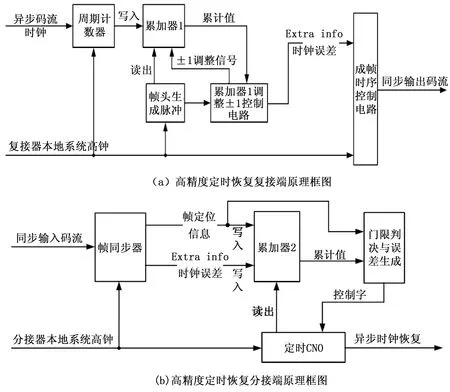
图3 高精度定时恢复原理框图
参考码速调整原理,认为异步码流时钟周期的持续时间就是要传输的业务信息,复接器对异步码流时钟进行累积测量,按正/负码速调整规则,每帧传输要么多传输一定时长的业务信息,要么少传输一定时长的业务信息,在分接器端,将接收到的持续时间信息保存至FIFO,根据FIFO容量值恢复异步码流时钟[9-10]。实现时,帧结构中实际是没有传输“持续时间”这个业务信息的,而只传输时钟误差,在分接端可根据该时钟误差值,实时恢复出当前异步码流时钟。
如图3(a)所示,复接器本地系统高钟首先对输入的异步码流时钟采样计数,得到以复接器本地时钟为基准的异步码流周期计数值,每异步码流时钟周期结束时,将周期计数值写入累加器1中。向累加器1写入操作等效为向累加器当前值增加一个写入值,从累加器1读出操作等效为向累加器当前值减少一个读出值。图3(a)中所示“±1调整信号”表示向累加器当前值增加/减少数值1。
“累加器1调整±1控制电路”用于在每帧起始时刻根据累加器1的累计值进行调整。若累计值大于给定门限,就向累加器1多读出一个数值1,否则向累加器1少读出一个数值1。该±1调整信号就是定时误差信号,将该信号放入帧结构中生成同步输出码流。
图3(b)所示接收端,要求分接器本地系统高钟频率和复接器本地系统高钟频率标称值相等。从信道中接收的同步码流经过帧同步器后,得到帧定位信号,并从帧结构中解析输出Extra info时钟误差信息。帧定位脉冲和Extra info均向累加器2写入数值,帧定位脉冲向累加器2写入固定值,该固定值等于帧周期除以系统高钟频率;Extrainfo为发端的±1调整信号,累加器2每帧除了累加固定值外,还根据Extrainfo的指示执行+1或-1操作。
“门限判决与误差生成”模块在帧定位脉冲控制下,每帧对累加器2的累计值进行幅值判断,当累计值大于0则表明定时NCO速率偏低,需要增大定时NCO频率控制字,若累计值小于0则表明定时NCO速率偏快,需要减小定时NCO频率控制字。定时NCO每溢出一次就生成一周期异步时钟,同时对累加器2执行读出操作,读出操作是对累加器2的当前值减去当前NCO溢出周期的计数值。最终通过定时NCO恢复出异步时钟,与发送端异步码流时钟相比,抖动幅度为分接器本地系统高钟周期。
本方案中设计的定时NCO为增强型NCO[11],相比于传统NCO,可产生任意频率。传统定时NCO一般实现方式为一个累加器,只有在溢出后才能生成溢出,而本定时NCO巧妙的利用了累加增量、模值和补码的关系,可预知溢出脉冲时刻。该定时NCO经过修改后还可以实现误差控制,控制定时NCO的工作频率,在分接器中输出最终定时脉冲时,就是采用该定时NCO来实现数字时钟的低抖动调整。
经过上一步的全数字锁相环高精度数字定时恢复后得到时钟的抖动最小仍限制在一高钟周期内,为进一步降低定时抖动可在数字提取定时输出后级联窄带模拟锁相环,对定时信号进一步滤波提纯,即双环定时提取方案。
由全数字锁相环产生的全数字高抖动幅度时钟经过模拟锁相环进一步提纯后转换为同频低抖动低相噪时钟,作为分接器支路输出工作时钟。经过双环模拟提纯后的时钟可满足本系统支路时钟抖动要求。
3 定时环路数学模型
定时恢复环路可以采用一阶环或二阶环实现。当采用一阶环实现时,在收发两端存在频偏时,接收端将会出现固定的稳态相位误差,在收发两端频率偏差较小时可以采用。当采用二阶环实现时,收端将完全补偿发送端的频率偏差,理论静态相位误差为0,二阶环适合在收发频偏较大时使用[12]。本方案收发两端采用较高频率稳定度的恒温晶振实现,一阶环即可满足定时恢复的要求,因此,这里采用一阶数字环用于定时调整,误差信号驱动NCO产生定时信号,可直接在z域进行计算,得出环路参数。一阶定时环路的数学模型如图4所示。
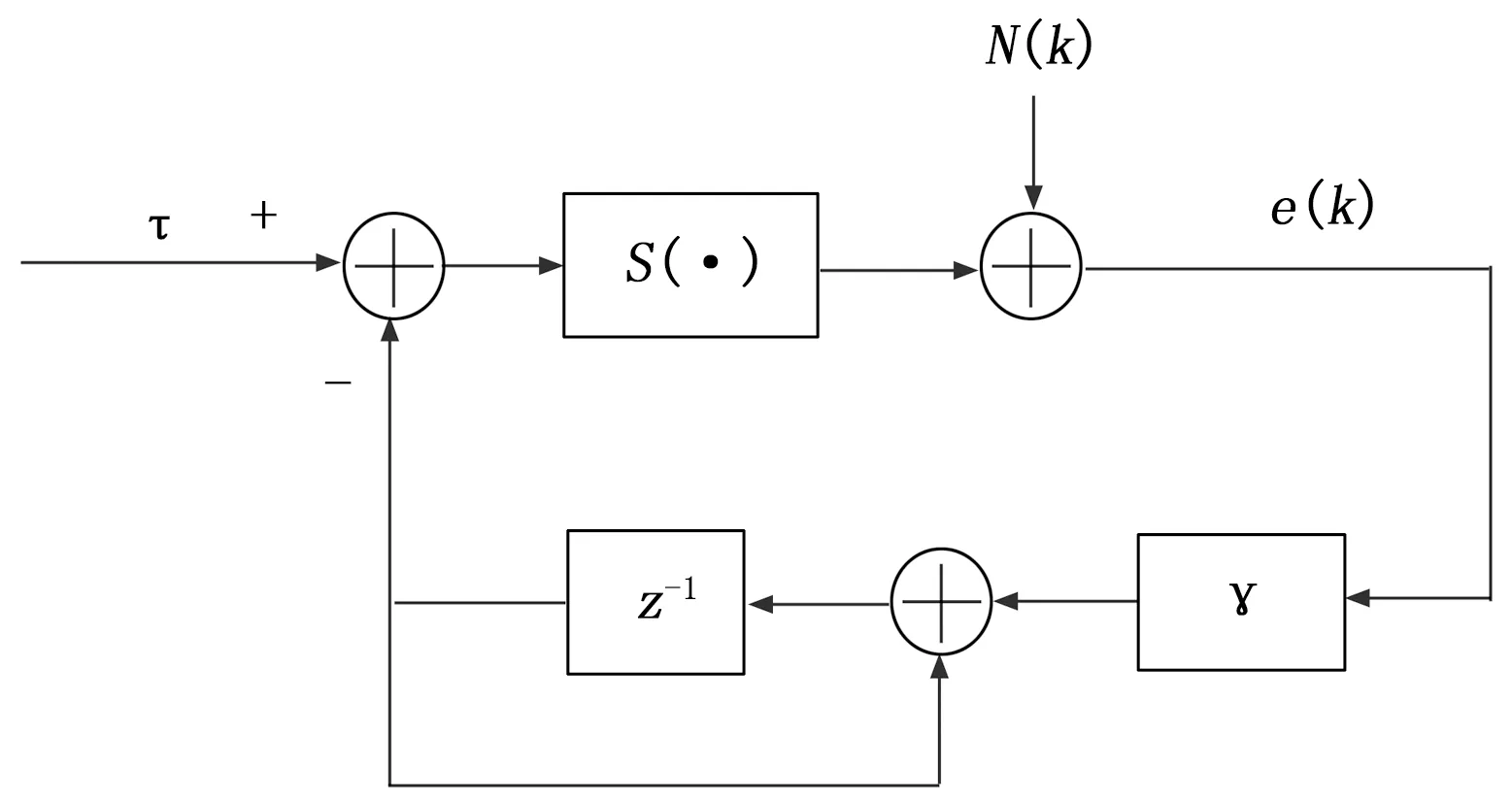
图4 一阶定时环路的数学模型
在图4中,NCO累加器宽度为24 bit,γ是除鉴相器之外的其它部件的总增益,为:
(1)
K为引入的定标因子,也是环路唯一能改变的参数,决定着环路带宽;T为一帧周期;TNCO为定时NCO的工作时钟周期,本定时恢复环路使用系统时钟TCLK;N为NCO输出的定时同步时钟周期与一帧周期之比。

由图6,写出环路中定时NCO的差分方程为:
(2)

(3)
式中,N(k)为零均值噪声,S(·)为定时误差检测器的S曲线[14](亦即鉴相特性曲线),并有:
(4)
E(·)为求数学期望。将式(2)、(3)合并,得到:
(5)
(6)
A为S曲线在环路稳定点τs处的斜率,即:
(7)
将式(6)代入式(5)得到:
td(k+1)=(1-γA)td(k)-ΥN(k)
(8)
应注意到,N(k)由于为零均值,则必然有td(k)为零均值。对上式应用z变换可得到:
Td(z)=(1-γA)Td(z)z-1-γN(z)z-1
(9)
可以将Td(z)视作环路对N(z)的响应。将上式整理后得到环路的传输方程为:
(10)
令z=exp(j2πfT)并代入上式,得到环路的频率响应为:
(11)
下面根据环路的频率响应计算等效噪声带宽。等效噪声带宽的定义为:
(12)
将式(11)代入式(12),得到:
(13)
用符号速率对上式进行归一化,得到归一化等效噪声带宽:
(14)
由于实际中,γA远小于1[15],上式可简化为:
(15)
将式(1)代入上式,得到:
(16)
4 仿真结果及分析
本次仿真背景基于多中继的散射网络,最长的中继通信链路包括5跳散射中继和6跳光中继,群路时钟经过每跳无线散射信道或光纤传输信道后,都会引入中继链路时钟抖动,经多跳中继传输后链路时钟抖动会累积增大,严重情况下会导致接收端时钟失锁,造成通信中断影响通信性能。所以此次仿真主要对比传统定时恢复方案与双环提取方案在5跳散射中继情况下时钟恢复效果的对比。下面分别对1跳、3跳和5跳的情况进行分析。各图中的相位差为相对高钟计数的差值,时间为高钟时长。
图5和图6分别为传统码速恢复和双环提取方案在1跳中继时,恢复时钟与原时钟的相位差比较。

图5 传统时钟恢复在1跳时的相位差
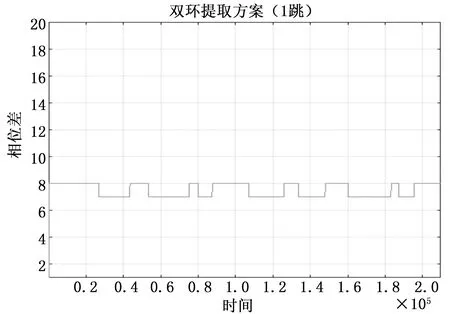
图6 双环提取方案在1跳时的相位差
由图5可以看出,传统的时钟恢复方案在一跳时就存在严重的时钟漂移,得到的恢复时钟相对原时钟左右摇摆。在图6使用双环提取方案时,恢复时钟与原时钟的相位相对稳定,会随机出现一个高钟宽度的抖动,使用的高钟频率为81.92 MHz,所以抖动极其微小。
图7和图8分别为传统码速恢复和双环提取方案在3跳中继时,恢复时钟与原时钟的相位差比较。
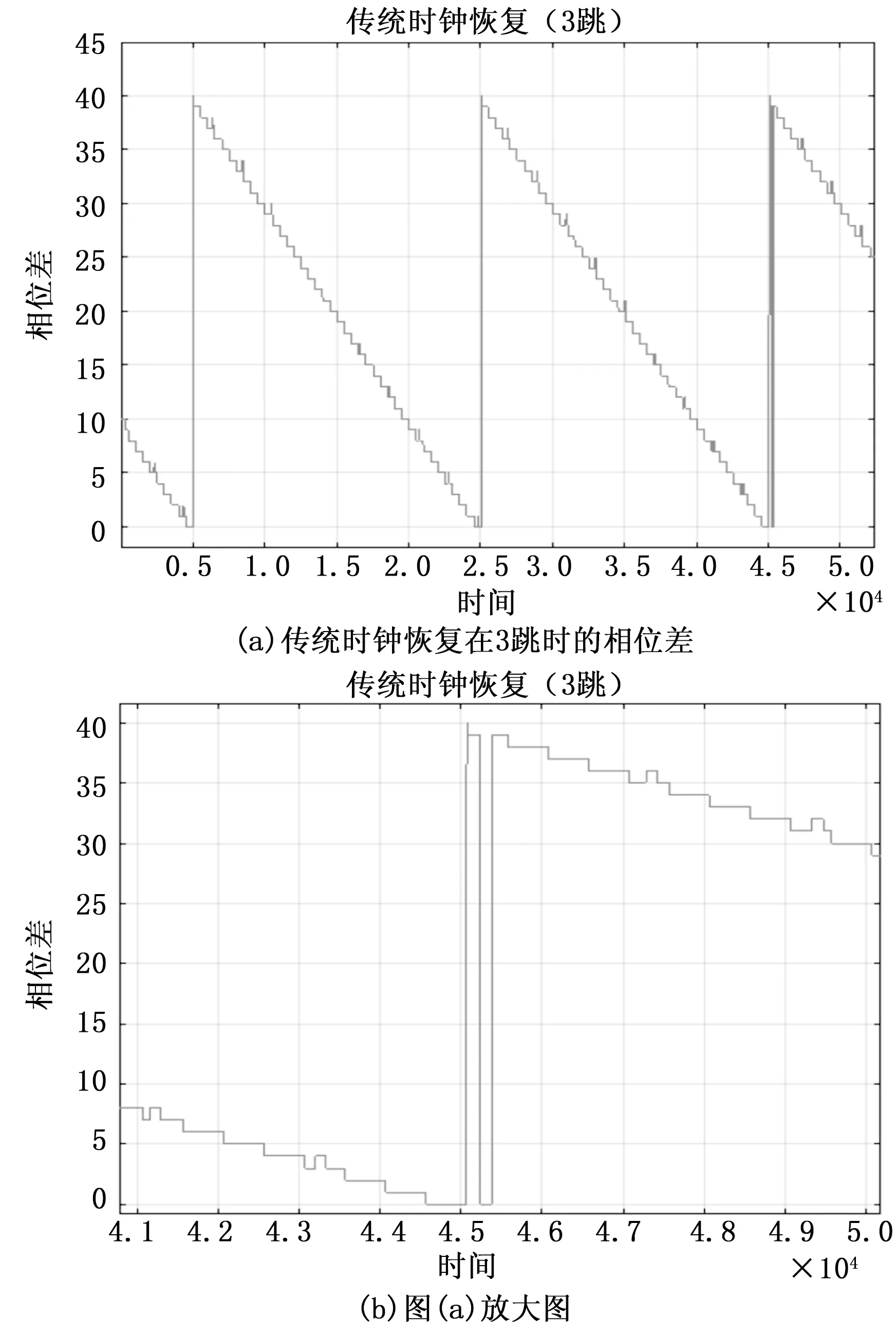
图7 传统时钟恢复(3跳)
图8 双环提取方案在3跳时的相位差
图7(a)中可以看出,传统时钟恢复在3跳时除了存在严重的时钟漂移,时钟抖动也开始加剧;在后半部分的放大图图7(b)中可以更清晰地看出存在瞬时的时钟漂移,这将有可能导致接收端时钟失锁。而图8显示的双环提取方案在3跳时,抖动略微增大,极大值与极小值相差两个高钟宽度,但是每次抖动依然仅为一个高钟宽度,这对接收端时钟恢复并无太大影响。

图9 传统时钟恢复(5跳)
图9和图10分别为传统码速恢复和双环提取方案在5跳中继时,恢复时钟与原时钟的相位差比较。

图10 双环提取方案在5跳时的相位差
图9 (a)的整体形态与图7(a)相似,时钟抖动更为频繁,放大后的图9(b)中,瞬时时钟漂移更加严重而且持续时间变长,可以预测在更多跳数后时钟将持续漂移造成远端失锁。图10中的双环提取方案在5跳时,极值差为四个高钟宽度,每次抖动幅度依然为一个高钟宽度,恢复的时钟可以满足大多数工程要求。
5 结束语
本文提出的双环提取方案,在性能上极大的优于以往使用的时钟恢复方案,消除了时钟漂移的影响,仅存在微小的时钟抖动,并在多跳时依然稳定,在散射通信组网中可以克服多跳的长链路时钟失锁造成的失步问题。
