目标位置未知的多自主体系统多目标一致巡航控制
2018-10-17邵敬平田玉平
邵敬平 田玉平
(东南大学自动化学院, 南京 210096)(东南大学复杂工程系统测量与控制教育部重点实验室, 南京 210096)
近年来,多自主体系统的巡航控制在军事和民用领域(如安全监督[1-2]、卫星编队飞行[3]、轨道保持[4]等)得到广泛的应用, 因而吸引了越来越多的关注.巡航控制可以作为一种控制策略,这类控制策略保证所有的移动自主体以规定的半径巡航一个或多个目标.
针对目标巡航控制问题,最简单的情形是在目标位置已知的前提下,单个移动自主体巡航单个静态目标. 对于这种情形,只需要设计巡航控制器保证自主体向目标移动且最终绕着目标以规定的半径作圆周运动. 最近,基于一致性理论,有一些文献讨论了多个自主体的巡航控制问题. 如,基于循环围捕策略,文献[5]提出了一种多自主体系统协同控制方法保证所有的自主体执行目标围捕任务. 为了保证多个移动自主体环绕多个目标,文献[6]提出了2类分布式巡航控制算法. 文献[7]研究了多自主体系统的目标勘测问题,该问题包含自主体间的避碰和自主体抵达规定目标区域,然后以正多边形队形环绕目标2个子任务. 文献[8-9]考查了具有二阶积分器动态的多自主体系统包围多个目标的问题. 而以上文献在算法中直接采用目标的位置信息,目标的位置信息通常可由 GPS 直接获得. 但在现实环境中,自主体并不能直接获取目标的准确位置信息. 为此文献[10-11]提出了定位-控制策略用于求解单个自主体定位与巡航控制单个目标的问题. 文献[12]进一步考察了单个自主体的多目标定位与巡航控制问题. 文献[1]考虑了基于距离测量的一个移动节点巡航一个目标的问题,由于目标的位置未知,提出了一类自适应巡航控制器. 基于距离和距离的变化率,文献[13]基于目标的位置未知,研究了无人驾驶飞行器系统的目标巡航控制问题. 文献[14]基于方位角测量,研究了无人驾驶飞行器系统的目标巡航控制问题. 文献[15]提出了一类不连续一致巡航控制算法,用于求解多自主体系统的多目标一致巡航控制问题,与前面的文献相比,文献[15]中目标的位置是已知的,但对于每个自主体来说,目标的中心是未知的,该文中设计分布式估计算法估计多目标中心,要求每个自主体最终执行一致巡航任务,即要求每个自主体最终均匀地分布在同一个圆周上以相同的角速度执行巡航任务. 这类巡航控制器统一称为一致巡航控制器.文献[16]考虑了目标位置未知情况下的多自主体系统巡航多目标巡航问题.
为了进一步考察目标位置未知的多自主体系统一致巡航多目标的问题,本文在文献[16]的基础上,进一步提出了新的一致巡航控制算法,并要求所有的自主体在同一圆形轨道上巡航多个目标,即要求所有自主体的巡航半径相同. 结合估计算法和一致巡航控制算法,证明了在目标位置未知的情况下,所有自主体最终都能执行一致巡航任务. 最后,给出了6个自主体一致巡航4个目标的数值仿真,仿真结果验证了算法的有效性.
1 问题描述

(1)

下面考虑平面上有n个移动的自主体,每个自主体满足如下一阶积分器动态:
(2)


图1 方位角示意图
(3)


(4)
式中,‖·‖表示向量或矩阵的范数.

(5)

① 随着时间t→∞,‖xi(t)-ξ(t)‖-d渐进趋于0的领域内,其中,d表示期望的巡航半径;


因此,目标位置未知的多自主体系统多目标一致巡航控制问题可描述如下:
考虑多自主体系统(2)和多目标ξk,k∈O,设计目标位置估计器,目标中心估计器和一致巡航控制器满足控制目标1~控制目标3.
为了使问题具有可解性和有意义,给出如下假设:
1) 图G是连通的,且每个目标至少能被一个自主体检测.


2 基于估计器的一致巡航控制算法设计
下面设计一致巡航控制算法求解目标位置未知的多自主体系统多目标一致巡航控制问题. 一致巡航控制算法主要有目标位置估计器、目标中心估计器和一致巡航控制器3部分组成. 在本文中,分别采用文献[16]中的目标位置估计器和目标中心估计器. 若目标ξk为自主体i的邻居节点,则目标位置估计器[16]为
(6)


(7)
对于自主体i,设计如下分布式目标中心估计器[16]:
(8)
式中,i∈V,k∈O;ωi(t)∈R2为内部状态;ri(t)∈R2表示自主体i对多目标中心ξ在t时刻的估计;sgn(·)表示符号函数,内部状态初始化为
(9)
为使所有的自主体执行一致巡航任务,设计一类新的一致巡航控制器,即
(10)
(11)
(12)
(13)

结合上述算法,有如下主要结论:
定理1考虑估计器(6)和(8),以及一致巡航控制器(10). 如果假设1和假设2成立,且每个移动目标的速度足够小,即存在一个充分小的正常数ε>0,使得
(14)
成立,则存在一个正常数κ(见式(8))使得所有的自主体执行一致巡航任务,即每个自主体满足控制目标1~控制目标3.
证明基于上述算法,验证每个自主体能够满足控制目标1~控制目标3.

(15)
(16)
由于假设1、假设2和条件(14)成立,结合文献[16]中定理3.2的证明可得,对于任意的i,ri(t)-ξ(t)渐进收敛到0的领域内.进一步可得
‖xi(t)-ξ(t)‖-d≤ (‖xi(t)-ri(t)‖-d)+
‖ri(t)-ξ(t)‖
(17)
由i的任意性可知,所有的自主体都满足控制目标1.
然后,证明所有的自主体满足控制目标2. 由式(12)可得
(18)
(19)
在图G是连通的条件下(见假设1),根据平均一致性理论[18],可得

(20)
(21)
定义ν={ν2,ν3,…,νn}T,结合降阶拉普拉斯的定义,式(21)进一步写为

(22)
由假设1可知,图G是连通的,结合引理1可知,ν(t)指数收敛到0,即对于任意的i∈{2,3,…,n},有
(23)

3 数值仿真
给出一个例子说明一致巡航控制算法的有效性. 在目标位置未知的前提下,考虑6个自主体构成的多自主体系统一致巡航4个动态的目标. 自主体间的通信拓扑如图2所示,自主体系统与目标间的检测矩阵为B=[bij]∈R6×4,其中,b21=b22=b32=b42=b43=b53=b54=b64=1,矩阵其他元素为0.

图2 通信拓扑
任意选取微分方程(6)的初始值和自主体的初始位置. 同时选取满足条件(9)内部状态ωi(t)的初值. 给出目标的动态方程为

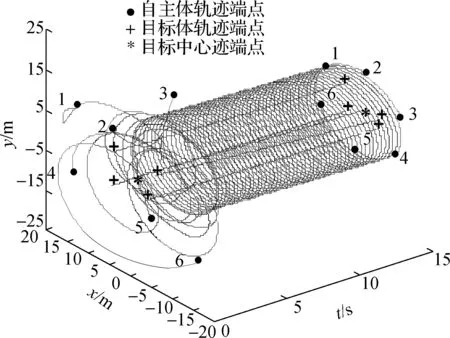
图3 关于4个移动目标的6个自主体的巡航轨迹.

图4估计误差轨迹
4 结论
1) 提出了一类新的协同控制方法,用以求解目标位置未知情形的多自主体系统多目标一致巡航控制问题. 并从理论上证明了算法的收敛性. 本文中的一致巡航控制算法是连续的,稳定性分析更简洁.
2) 针对6个自主体一致巡航4个目标的例子进行了数值仿真,仿真结果验证了算法的正确性和有效性.
3) 该算法无需假设目标的位置已知,只需要部分自主体能检测到目标,这是使得本文设计的一致巡航控制算法应用范围更广泛.
4) 本文中的算法只需要拓扑是连通的,一致巡航控制器是连续的,因而稳定性分析更简洁. 对于动态拓扑和系统模型带外部扰动的情形是今后需要重点研究的一个方向.
