通过静态干涉图测量量块参数
2018-10-17
(福州石径信息技术有限公司 福建 福州 350000)
一、引言
量块是长度传递的标准,干涉测量技术中常用其作为高精度参数的测试。目前,一等量块通常使用小数重合法在Köster干涉仪或Twyman干涉仪中测量[1-3,5,7]。通过干涉方法获得量块参数的方法大致可分为两种类型。第一种类型是基于静态干涉图的条纹分析。一种典型的方法是使用两种以上不同波长,通过数字图像处理的方法,在单色干涉图中定位条纹中心来获得量块的中心长度的小数部分,这种方法只需要在传统干涉仪中添加图像探测器(通常是CCD摄像机)[3]。然而这种方法的算法非常复杂,并且有时条纹分析软件并不能自动处理干涉图。另一种基于静态条纹分析的方法是通过傅里叶变换处理具有载频的干涉图[4,5]这种方法虽然可以实现自动测量,但算法的复杂程度和计算时间也显著增加。第二种类型采用时域移相算法测量[7-9],能够在短时间内自动测量量块。时域移相算法不仅可以测量量块中心长度的小数部分,还可以测量量块的表面面形分布。但是这种方法需要精确的移相器,并且需要有效消除数据采集期间的环境噪声。
在本文中,量块参数从具有一定空间载频的静态干涉图中获得,其载频通过倾斜干涉仪的参考镜引入。在计算机中生成具有该空间频率的虚拟正弦光栅,加载在干涉图上以获得莫尔图案。移动光栅周期的1/4,得到另一个具有π/2移相的莫尔条纹图。同样,还可以得到另外两幅具有π/2移相量的莫尔条纹图案。在通过低通滤波器去除上述四个莫尔条纹图中的高频条纹后,就得到了四幅移相量分别为π/2的干涉图,再利用四步移相算法恢复波前。在该方法中,静态干涉图的分析虽依然采用时域移相算法,但不再需要移相器。另外,通过数学方法引入移相可避免相关误差,通过处理实际干涉图即可得到最终结果。
二、原理
通过倾斜干涉仪的参考镜,可以获得具有线性载波频率的干涉图。测试光可用方程(1)表示:
I(x,y)=a+bcos[2πfx+Φ(x,y)]
(1)
式中,a表示干涉图的背景光强,b/a表示对比度,Φ(x,y)是待测相位。
上述参考光可表示为:
I(x,y)=1+cos(2πfrx+Φr)
(2)
这里fr表示载频频率,Φr表示初始参考相位。莫尔条纹可由两项叠加得到:
s(x,y)=a+0.5·bcos[2π(f-fr)x+Φ-Φr]
+0.5·bcos[2π(f+fr)x+Φ+Φr]
+a·cos(2πfx+Φ)+bcos(2πfrx+Φr)
(3)
如果使用适当的滤波器,则可以从莫尔条纹中提取具有测试相位的干涉图。可表示为:
s(x,y)=a+0.5·bcos[2π(f-fr)x+Φ-Φr]
(4)
如果参考干涉图的移相量Φr分别为0,π/2,π,3π/2,则经过滤波后的四幅干涉图可表示为:
S1(x,y)=a+0.5·bcos[2π(f-fr)x+Φ]
S2(x,y)=a+0.5·bcos[2π(f-fr)x+Φ-π/2]
S3(x,y)=a+0.5·bcos[2π(f-fr)x+Φ-π]
S4(x,y)=a+0.5·bcos[2π(f-fr)x+Φ-3π/2]
(5)
可以看出,以这种方式获得的表达式与四步移相中的表达式相同,然后可以通过PSI算法计算待测相位:
(6)
如果f=fr,结果则为待测相位,如果不是,则结果表示倾斜的波前,消倾斜后即可得到待测相位。
三、实验
该实验在Twyman干涉仪上实现,用两个频率稳定的He-Ne激光器(分别为633nm和543nm)作为光源。图1所示为倾斜Twyman干涉仪中的参考镜获得的具有载波频率的干涉图。

图1 具有载频的量块干涉图
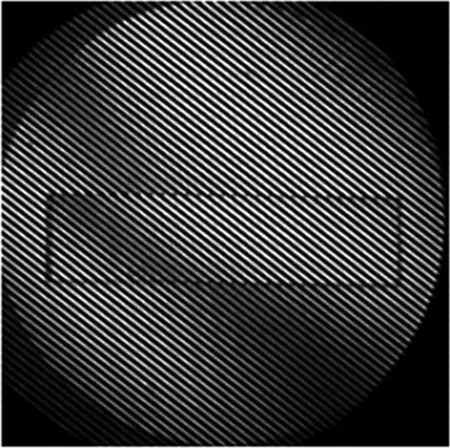
图2 虚光栅产生的莫尔条纹图
在用傅里叶变换处理图1所示干涉图之后,频域中傅立叶频谱的中心对应于空间载波频率。利用所获得的fr,可以由计算机根据等式(2)生成虚拟光栅(也称为参考干涉图)。通过将实际干涉图(图1)与虚拟参考干涉图(莫尔条纹)重叠,如公式(3)所示,即得到如图2所示结果。通过选择合适的滤波器,可以将如表达式(4)中所示的具有频率偏差f-fr的干涉图与莫尔条纹分离,如图3所示。由于频率偏差f-fr远小于载波频率f和参考频率fr,所以要选择合适的低通滤波器或带阻滤波器。将参考干涉图的初始相位φr分别设置为0,π/2,π,3π/2,即可获得在相邻干涉图之间具有精确π/2移相的四幅干涉图。

图3 分别具有π/2移相的四幅干涉图
从上述干涉图中提取量块及研合面面形,面形分布如图4所示。

图4 量块面形和研合面
用一个平面拟合研合面的面形数据。整个表面的倾斜量,包含量块顶面的数据点,根据拟合平面消除。并且将整个面形沿z轴平移至研合面平面面形数据平均值为零的位置。因此,在量块中心处可以获得量块的中心长度的小数部分。通过改变干涉仪的光源,可以在不同波长下获得中心长度的其他小数部分。然后使用小数重合法计算量块的中心长度。
四、结论
本文采用虚拟光栅莫尔技术测量量块参数,仅需要分析一个静态干涉图,避免了时域移相法在获取多个干涉图期间引入额外的环境噪声(例如温度变化和空气湍流)。另一方面,虚拟光栅是通过数学方法引入移相量,成功地避免了传统时域移相干涉仪中移相器的线性和非线性误差。然而,由于不能从单个静态干涉图精确地判断实际条纹顺序,所以本文所提方法不能确定波前的方向。在调整载波频率的方向和判断条纹顺序号时必须小心谨慎。
