主动声呐多假设跟踪算法的一种改进
2018-10-17费自刚任凯威9388部队9分队湛江540第七一五研究所杭州3003
费自刚任凯威(.9388部队9分队,湛江,540; .第七一五研究所,杭州,3003)
在强混响、高背景噪声环境下,主动声呐的目标检测存在着很大的困难。发射声波与海底海面作用,会产生大量的虚警;随着声呐作用距离的增加,虚警的数目也会增加。虚警数目多会严重影响主动声呐的性能,所以降低各种环境下的虚警是主动声呐信号处理中的重要环节。
实际工程中,通常利用后续的跟踪算法来对检测后的目标进行二次确认,同时排除相应的虚警。当目标跟踪过程遇到存在大量虚警和杂波时,主要难点就在于数据关联。常用的方法包括最近邻法(Nearest Neighbor,NN),概率数据关联(Probability Data Association,PDA),联合概率数据关联(Joint Probability Data Association,JPDA)等,这些关联算法都是基于当前扫描周期的量测进行数据关联。而MHT(Multiple hypothesis tracking)是一种延迟决策逻辑算法,该算法的模型由Donald B Reid于1979年发表的文献中首次被提出。当观察到跟踪情况冲突时,MHT算法能够形成可选择的数据关联假说,通过延迟判决较好的解决数据关联的问题。然而,当出现漏检情况时,MHT和常用的数据关联算法一样,会自动停止继续关联。当目标重新被检测到时,会把它判定为新目标。
针对该问题,1988年,Y Bar-Shalom首次提出了基于 M/N逻辑的航迹起始方法[1],该方法认为在一个长度为N的数据滑窗内,如果其中有M次关联到亮点,则是目标航迹,否则是虚警。由于不能直接反映出目标初始航迹与信噪比之间的关系,使得高信噪比目标的确认时间过长。进一步,Kirubarajan等的理论分析和实验结果表明,充分利用目标幅值和运动信息能大幅度提高目标跟踪性能,由此,Kennedy在2008年的一篇文章中提出了一种基于杂波特性的自动跟踪起始方法[2],该方法在分析目标回波能量统计规律和轨迹时域连续性的基础上设计算法,克服了传统M/N方法的不足,但该方法适用范围较窄,宽容性较差。
本文将多假设跟踪与似然函数相结合,利用目标运动轨迹的连续性,通过多假设跟踪算法关联处理连续多帧观测序列,实现沿未知目标运动方向快速累积信号能量,从而在离散观测序列中确定出疑似目标。面对同一个目标的检测断续的问题,能够延迟判决,继续跟踪。
1 MHT算法原理
1.1 假设生成
聚簇是彼此相交的跟踪门的最大集合,其内在的目标和量测存在一定的关联关系。假设是聚簇内一组目标和量测的分配互联关系,1个聚簇可以包含若干个假设,每个假设又可以包含若干相容的航迹。在对聚簇内的目标和量测进行关联生成假设的同时修改簇中每个假设的概率和目标的状态[3]。设定k时刻量测的集合、累计量测集合、关联假设集分别为(1)~(3)式:

Ωk中的假设把累计量测集与目标、杂波相关联,它是由k-1时刻的关联假设集和当前量测集Z(k)关联得到的。
1.2 假设概率计算
记关联事件θk为描述当前量测与目标之间的对应关系,设表示关联假设集Ωk中的第l个假设。根据假设生成的概念,它由Ωk-1中的某个假设和关联事件θk组合得到,即

其中

如果量测zk,i源于一条已建立的航迹,其服从高斯分布,记ti为与量测zk,i关联的目标编号;若量测源于杂波或虚警,则其在跟踪门内服从均匀分布,概率密度为V-1;若量测zk,i源于一新目标,也假设其服从跟踪门内的均匀分布,则

其中Λk,i代表新息的似然函数,


1.3 假设约简与剪枝
假设生成是影响 MHT算法复杂度的主要因素,通常采用低概率假设删除、假设合并等方法进行假设约简和裁剪。本文采用K-best最优假设和N-scan剪枝方法进行假设生成和轨迹树剪枝,以便MHT算法工程实现。
K-best是不列举所有假设的情况下,把K个置信度最高的假设例举出来的方法。构造一个基于簇的分配矩阵,量测表示为行,航迹、新轨迹和虚警表示为列,分配矩阵中元素即为量测与航迹之间似然概率负对数值,或是量测来自新航迹或虚警概率的负对数值。
N-scan通过限制轨迹树深度来控制假设数量,强制在k时刻产生的不确定性在k+N时刻延迟解决。当轨迹树的深度大于N时,N-scan将搜索轨迹树中当前置信度最高的叶子节点,保留该根节点分枝,删除其余分枝。
M-break是一种以航迹预测点取代关联测量点进而解决量测断续问题的方法。如果前一时刻的某条假设没有与当前批次的量测点关联,则该条假设分支当前的状态滤波值用状态预测值取代,归一化新息取该条假设前N次的均值;而在这条假设连续出现M次断续时,删除该假设。该算法很好的解决了主动声呐在目标检测过程中经常出现的量测断续问题。
2 改进的多假设跟踪算法
为了解决多假设跟踪算法的航迹起始的问题与量测断续的问题,本文引入似然比检测方法(Sequential Probability Ratio Test, SPRT),这是由Wald提出的一种统计决策方法[5]。与固定样本数检验等其它统计决策方法相比,该方法具有检验速度快、所需样本少、可在线计算等优点。构造SPRT的两个假设,可描述如下:
H0:目标不存在

H1:目标存在

式中,zj为第j帧扫描的观测,vj为观测噪声。以Zn表示直到时刻n的观测集合,即,并以i= 0,1分别标记在H0和H1的假设条件下前n个观测量对应的概率密度函数。根据前n个观测量,可得相应的似然比为:

Λn即为累积到时刻n的似然比,用表示单个时刻点n的似然比,假设观测向量独立同分布,则Λn可变换为:

利用统计量进行检测判决的过程可以概括为:选定两个常数η0和η1,。在第n个时刻的判决规则为:若,则停止序列检测,接受H0;若,则停止序列检测,接收H1;若,则等待下一帧数据到来,继续实施序列检测。其中,常数η0和η1是序列似然比检测的两个门限。本文的门限值在恒虚警条件下相应给出,恒虚警率为0.000 1,检测概率为0.95。改进的MHT算法如图1所示

图1 改进后的MHT算法流程图
3 仿真验证与海试数据验证
3.1 仿真验证
假设目标起始位置(1 000 m, 1 000 m),初始速度为6 m/s,沿着X轴做直线运动,同时每一帧随机产生 50个杂波点,MHT算法的参数取值为:K-best最优假设数值为K=3,N-scan回溯剪枝值N=4,M-break的断点值取3。图2给出了20帧的多假设跟踪结果图,已跟上的目标由红点表示,该结果能够体现该算法对杂波中运动目标能够进行稳定关联跟踪。其中X轴与Y轴代表距离信息。

图2 20帧跟踪汇总图
图3、图4给出了在13~15帧未检测到目标的情况,已跟上的目标由红点表示。图3是未利用似然函数的基础多假设跟踪算法,当遇到检测断续的情况立即停止了当前的跟踪,在同一目标重新出现时,将其认为新目标。图4是本文采用的算法,当目标出现漏检时,延迟判决,在目标重新出现后,继续跟踪。

图3 常规MHT算法断点跟踪放大图

图4 改进MHT算法断点跟踪放大图
3.2 海试数据验证
本文选用某舰的海试数据进行跟踪算法的验证,该次试验中主动声呐的测向误差和测距误差分别为σθ和σr,R为目标距离,航速为6 kn左右,本舰静止,坐标为(0,0)。MHT算法的取值为:K-best最优值为5,N-Scan剪枝值为4,断续值取为2。图5~图8为1~4帧的亮点图,图9为利用航迹起始算法处理后,确认的起始目标。
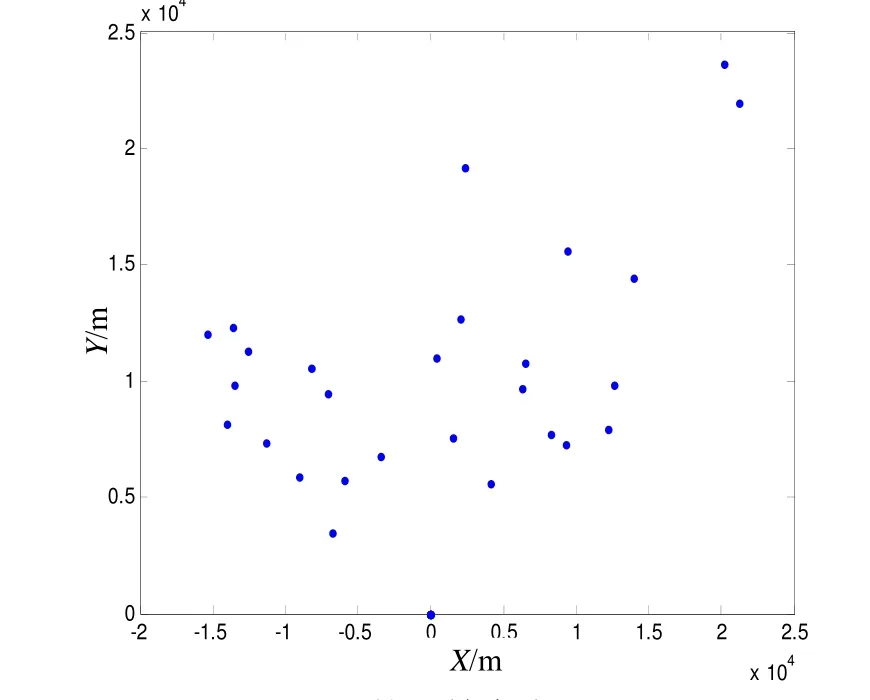
图5 第一帧亮点图
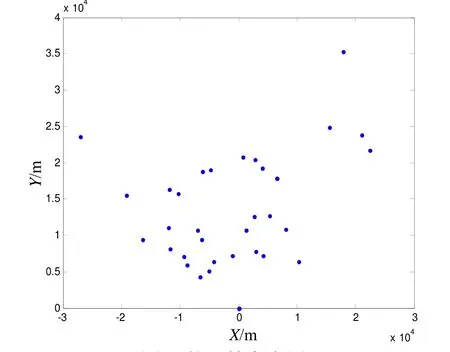
图6 第二帧亮点图
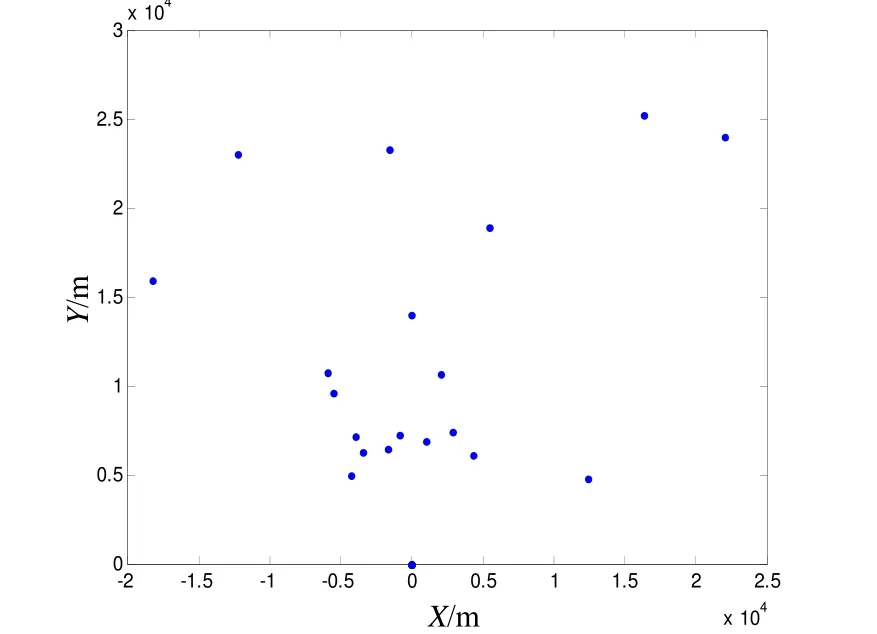
图7 第三帧亮点图
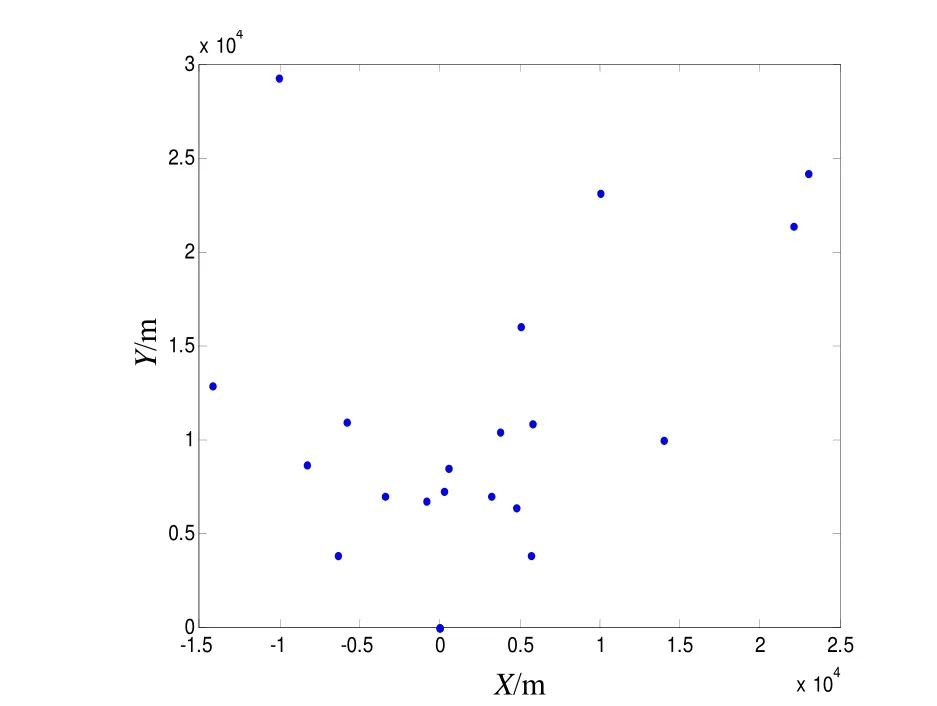
图8 第四帧亮点图

图9 航迹起始图
图10为采用断续检测方法的跟踪效果图。方框代表第10帧正在跟踪的航迹,其中目标舰在图中标志为正在跟踪的目标,其余出现了三个由虚警产生的干扰目标。6~8帧由于漏检,目标出现了检测断续现象,通过改进后的MHT算法能在杂波环境下稳定跟踪,且能解决目标检测中的断续问题。如果采用传统的MHT算法,则会将该航迹显示为两个目标。

图10 跟踪效果图
4 结论
常规的MHT算法是目前跟踪领域的经典算法之一,但在目标出现跟踪断续的情况下,目标关联能力降低。本文采用的改进MHT算法不仅采用常规的K-best和N-scan回溯剪枝算法降低了跟踪算法的复杂度,而且利用似然函数实现了对检测断续情况的断续跟踪,提高了跟踪算法的目标关联能力,具有较强的实用性。
