用意念控制机器人
2018-10-16章江
章江

麻省理工学院计算机科学和人工智能实验室与波士顿大学联手,联合开发出了一个反馈系统,让机器人可以读取人类思想,而不需要学习复杂的人类语言或以其他方式从人类获得命令。在创建该系统时,研究团队首先利用脑电图和肌电图来分别监测大脑活动和肌肉活动,将一系列电极放在使用者的头皮上和前臂上。然而脑电信号并不总是能可靠地检测到,同样也很难检测到肌电信号。研究人员通过将这两者合并,找到了一种更可靠的生物传感方法,使得系统可以在没有训练过的情况下为用户工作。
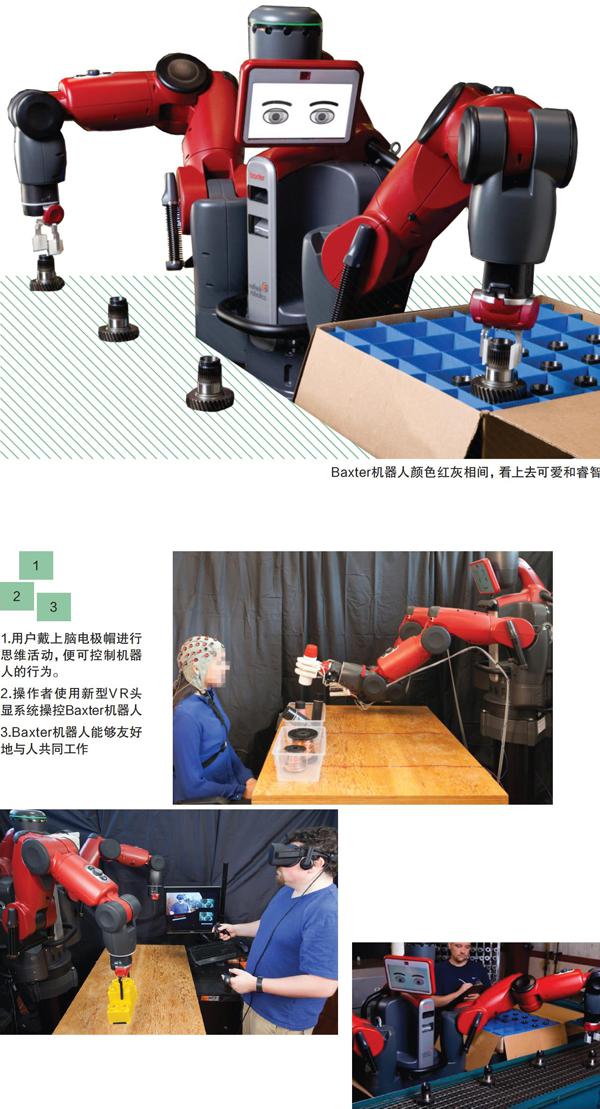
在这个过程中,人类只需依靠一个特殊的脑电极帽,然后进行思维活动,就可以控制机器人的行为了。这顶帽子的作用是读取和分析人类的脑电图(EEG),用户戴上之后就可以对机器人进行操控。机器人能接收来自人类大脑活动的信息,并根据指令做出相应的动作。
用意念操控机器人的原理听起来很简单,但是其中的算法相当复杂。机器人本身不能直接读出人类的思想,而是其背后的反馈系统在运作。其中的核心技术是脑电图监视器,可以对大脑发出的数据进行处理,通过算法计算出人类在思考什么,再将指令传递给机器人,它接到指令后就可以进行相应的动作。
“想象一下,无需输入命令、按下按钮或说任何一句话,通过意念就能实时控制机器人的动作,这是一件多么奇妙的事情。”麻省理工学院机器人研究实验室主任丹尼尔·罗斯展望道,“如此高效的解决方案将提升人类管理工厂机器人和研发无人驾驶汽车的能力,包括那些还未发明出来的技术。”
这项技术背后的算法并不需要太多时间,通过检测人脑的活动数据来探知人类的思想只需要10~30毫秒(接近于通过人类神经传递信号的速度)。在实验中,研究人员设法加入了“读心术”算法。不过,该系统目前仅能完成相对简单的二项选择,机器人只会对二进制的“对或错”活动做出反馈。但是研究团队认为,可以通过思想控制多项选择任务,在不断升级后做更复杂的事情。最终该系统将成为以更直观的方式完全控制机器人的基础,让未来充满了无限的可能。
麻省理工学院计算机科学和人工智能实验室使用的是Baxter人形机器人,它也常常被应用到机器人教学实验中。这是一种多功能机器人,专为工业自动化而设计,由“再思考机器人技术”公司(Rethink Robotics)研发,是机器人大师罗德尼·布鲁克斯的一件作品。这位美国国家工程院院士曾是麻省理工學院计算机科学院人工智能实验室的主任,也是发明Roomba家居清洁机器人的iRobot公司的联合创始人。作为世界机器人领域无可争议的人物,布鲁克斯在20世纪90年代设计了第一款火星机器人。他研发的首款Baxter协作机器人, 2012年一经上市便一举登上美国《时代周刊》封面,被评为了全球最佳发明。近几年,布鲁克斯和“再思考机器人技术”公司全力投入这种模仿生物系统、与传统工业机器人完全不同的创新人机互动机器人。
堪称“行家里手”
Baxter机器人的身体配以红灰相间的颜色,脸部是一个显示屏的形状,上面画着的Q版眼睛和眉毛能随着电力状态改变,还有两只可自由活动的手臂,看起来非常可爱和睿智。Baxter能够和人类一起办公,它拥有一套复杂的安全机制和传感器,保护它所协助的工作人员的安全。机器人头顶有一圈声纳传感器,有人走近时传感器就会自动放慢动作。如果感知到附近有人,它的脸就会变红。按下Baxter身上大大的“停”按钮,就会立即停止所有动作。所以如果它站在你旁边工作,不用担心会被它打倒。
Baxter机器人设计的关键在于它具有更类似人类的外观,以及透过内建软件与传感器而具备侦测环境的能力,因此能够在厂房中友好地与人们和平共处。相形之下,传统工业机器人的模样看起来更像是一台机器设备,通常必须加以隔离,以避免任何机械故障对人类造成伤害。另外,还必须分别加以编程,才能执行某项特定任务。作为一款创新的智能协作机器人,Baxter在生产环境中操作异常安全,不需要防护栏。它节省资金和宝贵的地面空间,可快速、无缝地连接到其他自动化设备,并且通常不需要第三方集成,是人力外包和固定工作形式自动化的理想替代。
Baxter的手臂关节都是经过铰接的,活动起来很流畅。这种顺应式手臂的驱动由马达带动弹簧进行,具有力度探测功能,能够适应自己的任务和环境,感知异常现象并引导部件就位。它具备一定的基本行为常识,能够凭借独特的功能和优点,为制造商在处理小批量、多品种的生产工作时形成具有成本效益的解决方案,解放技术员工的双手。
Baxter机器人不需要专门的编程人员和编程系统,无须专门的机器人专家或者烦琐的客户端程序使其完成生产任务。这款机器人也很容易训练,工厂里普通的工人就可以教会它如何工作,而且学习时间不会超过一小时。因为能够承担各式各样的任务,所以减少了第三方程序员的时间和成本。根据测试, Baxter的学习能力要比直接向其输入编码命令可靠性提高75%。可以预见,它未来将会被成百上千的应用到工厂的生产线或者仓库中。
这款机器人不是为高产量的目的而研发的,使用它来做高强度、快节奏的抓取工作可能没有其他机器人好,但参与一些小企业中的多样和较小的工序却堪称“行家里手”。既可以在工厂中独立负责做重复性的工作,又能够与工人配合默契,同步协作,为工业生产助力。它适合生产线上料、机器操控、包装和材料处理等多种任务的解决方案,灵活地用于众多生产环节并能在生产线和任务中重新部署。
Baxter机器人在工作中可快速改变用途,投资回报率通常小于一年,公司也不必专门提供腿和胳膊来促使它运行。它的造价是目前其他工业机器人的一半,减轻了中小型公司的负担,并且可通过定期的软件版本更新不断提升性能。目前,全球已有多家行业的领先公司将这款机器人整合到人力队伍中,并因此取得了巨大的商业竞争优势。例如美国最大的网络电子商务公司亚马逊(Amazon)开始研究Baxter机器人担任仓库保管员的可行性,相信还有许多其他公司也有类似的打算。
实时纠正错误
在6月26日召开的“2018 机器人技术:科学和系统”大会上,麻省理工学院计算机科学与人工智能实验室公布了这个新开发的新界面系统,用可连接到大脑的系统来指引Baxter机器人如何工作。研究融合了肌电图,让机器人充分理解人的手势和思维,通过与人类的合作来解决单项选择题。比如,你只要用手指指向杯子,就可以让它为你倒一杯水。这套系统的最终目标是不断改进现有的技术,使得机器人可以了解更加细致的人脑活动,或者解读更加详细的人类手势,从而生成更多的使用场景。
Baxter机器人可以实时读取人类脑波,以便了解人类何时不满意其行为。当它意识到用户认为自己犯了错误时,会立即加以纠正。研究人员表示,该系统旨在让机器人在没有任何训练的情况下充当人类意愿的延伸,能使Baxter的决策速度从70%提升到97%。由于内置一套“基本常识”系统,Baxter掌握了一些基础动作,例如知道移动或是放下某个物体之前,需要将其拿在手里。它还拥有一个亲切友好的界面,既可以给它编程,也可以通过“演示训练”教会它一件事情。用户可以做出细微的手势,指示机器人执行不同的任务,比如从地上捡起一串钥匙放在桌子上。
当人类大脑发现错误时,会发出一种名叫“误差相关电位”的特定脑信号。这种由人体在意识到某件事出现错误时自动生成的信号虽然十分微弱,但是決定人脑能否控制机器的关键因素,可以显著提高识别精度,创造人类和机器人之间的沟通的可能性。“误差相关电位”信号先被脑电极帽抓取,反馈系统收到后即判断出“人类对该机器人的选择表示不同意”,再把这个信息传递给机器人。机器人接收到信号后就会“知道”刚刚的选择是错误的,继而表现出“害羞脸红”,立刻停止正在从事的任务,等待人类用手部动作去处理。如果没有接收到信号,机器人就会继续重复它此前的动作。
由于系统使用手势和情绪反应等细微差别,因此允许用户在机器人损坏东西之前就可以阻止它,甚至可以帮助机器人在任务开始前对其任务进行修改。在一次实验中,研究团队要求Baxter机器人从飞机机身3个地方中挑选一个地方进行钻孔。由于任务出现变化,站在附近的人在机器人工作前向它做手势,改变钻孔位置,以训练Baxter能很好地执行新指令。在另一次实验中,机器人拿着线圈拟放进左边颜料盒。当用户用意念加以制止时,它就需要等待人类指示向左或向右的方向才能重新工作,这是机器人在进行复杂而微妙的通讯活动时采取的关键步骤。
据了解,这并不是第一次通过EEG相关技术来实现意念控制机器人的实验。只是在过去的研究中,需要人类去配合机器人,以机器人可识别的方式进行思考,而现在整个过程并不涉及人类参与实际操作。以上面提到的给飞机机身钻孔的实验为例,研究人员只是建议Baxter机器人在机身上左右移动钻头,不需要以特殊的方式思考或者训练自己与机器互动。
有了这些成功的实验,研究团队认为接下来有可能通过意念让Baxter机器人处理更复杂的任务,例如训练它与老年人、有语言障碍或行动不便的残疾人互动,甚至在口头交流之前通过关注或发出警报来预防意外。
“当你操控Baxter机器人时,所要做的就是心里赞同或不赞同它的行为。没有必要去训练自己按照规定的方式去思考。”麻省理工学院机器人研究实验室主任丹尼尔·罗斯指出,“机器人能读懂你的手势和思维,会主动来适应你,而不是反过来你去适应它。”
编辑:张程 3567672799@qq.com