基于89C51单片机的智能寻迹避障小车设计
2018-10-16谢晓敏
谢晓敏,闵 锐
(安徽新华学院,安徽 合肥 230088)
引言
随着科技智能化的飞速发展,如今无人驾驶技术已成为全球的焦点。本设计的控制核心采用的是89C51单片机,结合光电传感器、红外传感器、避障开关等器件构成多功能智能小车系统[1-3]。根据装在车头的光电传感器模块对黑胶带进行寻迹,判断直行还是左右转动,通过单片机的PWM通道的调节实现小车的左右转,从而使小车沿轨道行驶;红外避障开关主要是判断小车在汇合点以及弯道上行驶时,避免相撞或保持一定的安全距离。智能寻迹避障小车可以帮助人们在实现无人工即可自动运输避障的愿望。智能服务更是人们所需求的,因为智能服务带给人类不仅仅是方便快捷,更是安全保障。
1 总体思路设计
智能寻迹避障小车以89C51单片机为控制核心,通过单片机输入/输出口检测信号,输出驱动信号(高低电平信号)使电机正常工作,从而驱动两个电机控制其前进、后退、停止、左右转向等。通过红外光电传感器的对管(即发射管和接收管)作为检测信号工具,小车的车道主要为白色跑道,在白色跑道中间粘贴黑色胶带;当小车在白色跑道正常行驶时,装在车头底部的红外发射管发射出红外检测信号,当该检测信号照射到白色跑道后会反射回来,若红外接收管能接收到反射回的检测信号则通过输入/输出口输出低电平,致使小车继续前行;否则,接收不到发射管发出的检测信号则通过输入/输出口输出高电平,会根据实际情况对小车状态做出相应调整。其中,单片机控制系统主要根据输入/输出口的高低电平的状态来判断小车的行驶状态。当输入/输出口检测到的信号为高电平时,说明检测信号被地上的黑色胶带部分所吸收,表明小车行驶在黑色胶带线上或即将偏离正常跑道;同理,当输入/输出口检测到信号为低电平时,表明小车行驶在白色地面上,处于正常跑道范围内。系统总体设计框图如图1所示。
2 控制系统设计
2.1 系统流程图
本控制系统的工作流程:先对单片机主控系统进行初始化设置,通过单片机的输入/输出口来控制小车的前进;在行驶过程中,主控系统不断判断识别小车是否偏离跑道,如果偏离正常跑道,则需要进行转向调整或停车操作,本系统主流程图如图2所示。红外光电传感器部分工作流程:先对各红外对管(即红外探头)进行初始化,小车在行驶过程中,怎样保证在正常轨道上行驶而不跑偏,主要通过左右红外探头不断发射、接收信号来判断是否偏离轨道。若发现左偏,则会使小车向右偏转一定角度;反之,则使小车向左偏转一定角度。红外探头传感器工作流程图如图3所示。
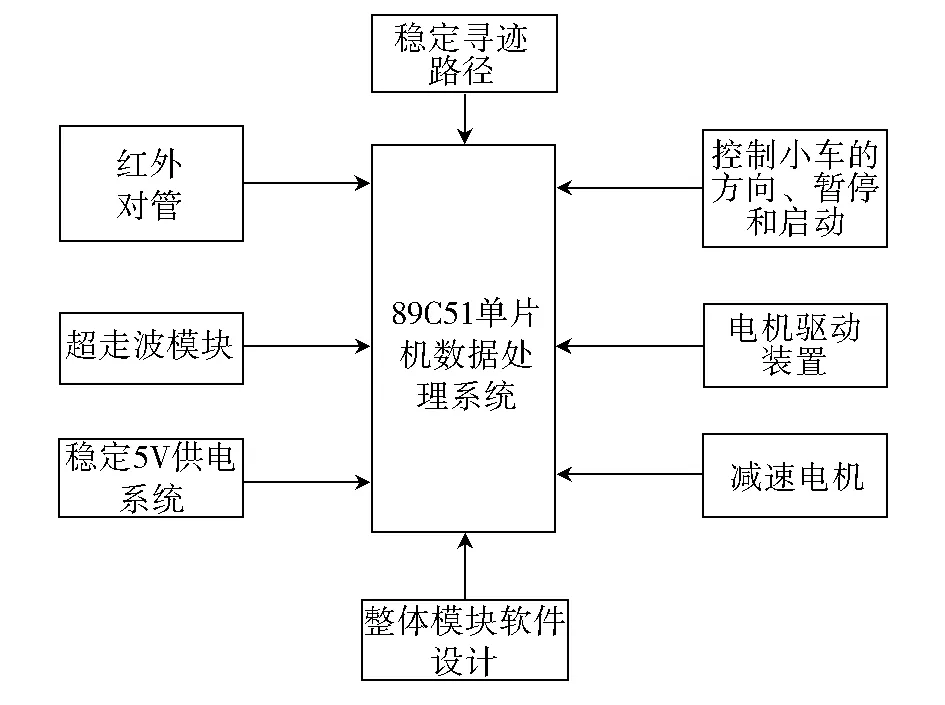
图1 系统总体设计框图
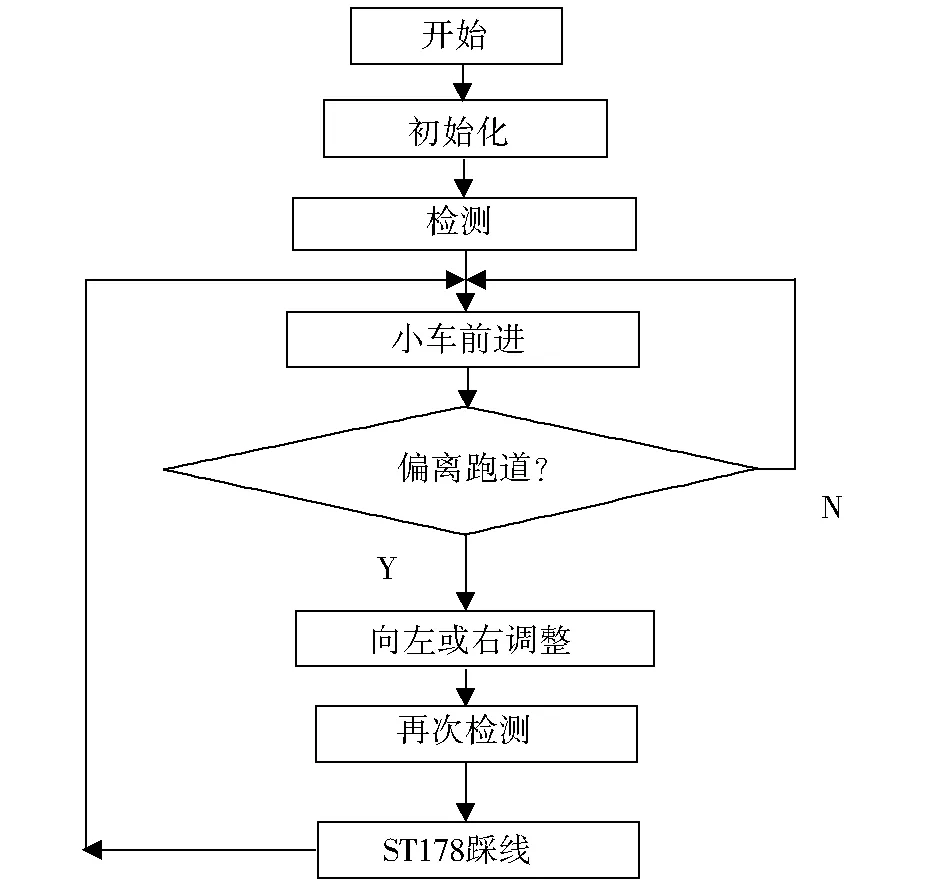
图2 系统主流程图

图3 红外探头传感器工作流程图
2.2 循迹避障可行性实验分析
通过红外光电传感器检测到的反馈信号可分为以下几种情况见表1。具体实验分析如下:
1)情况1说明四个红外光电传感器接收到的检测信号都是低电平(即检测到的都是白色跑道),说明小车即将偏离跑道行驶,则可通过PWM占空比使单片机控制小车断电,迫使小车停止下来。
2)情况2如图4所示,表明左2、左1、右1接收到的是低电平信号,只有右2接收到的是高电平信号(即右2红外对管检测到黑色胶带线),说明小车出现左偏且幅度较大,此时需控制小车向右大转,加大左轮转速,使小车向右转。
3)情况3、4、7三种情况说明左2对管接收到的都是低电平信号,右1接收到都是高电平信号,右2接收到的电平信号不完全一样,说明小车左偏幅度不是很大,右1能够检测到黑色胶带线,右2检测不到是左偏幅度最小,这两种情况可按一种处理,小车向右微调,此时的占空比与第2种情况不同。
4)情况5、9、10三种情况比较相似,不同的是左2接收到电平信号相反,其他三个红外接收管接收到的信号是一致的,表明小车右偏幅度不是很大,与情况3、4相反。
5)情况6当左1、右1同时检测到黑线时,说明小车沿直道行驶如图5所示;情况8只有左1接收到低电平,其他都是高电平,需要作出向左大转调整;最后一种特殊情况则是所有红外接收管接收到都是高电平信号,说明是遇到分岔路口情况。

表1 循迹情况分析表
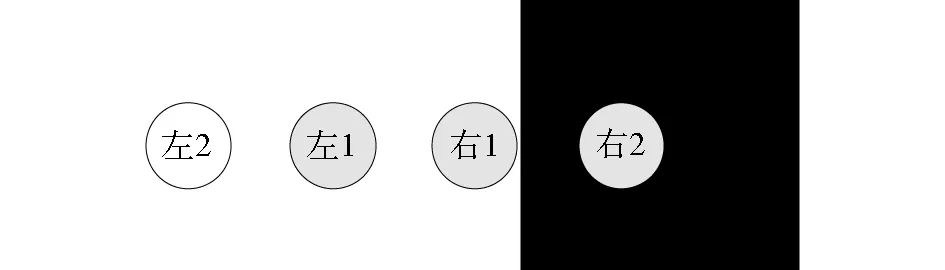
图4 向右大转示意图
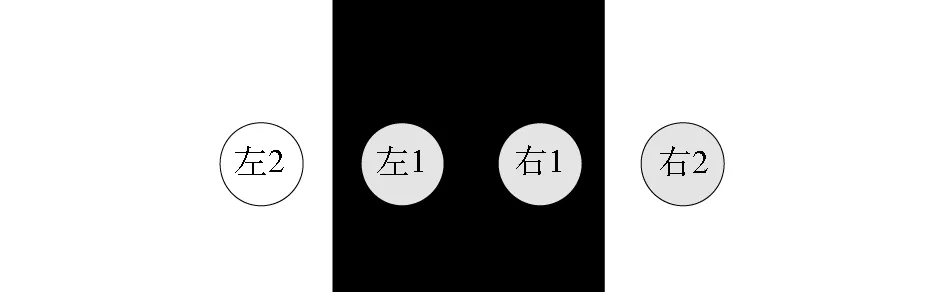
图5 直行示意图
3 实物制作与测试
3.1 电路原理图设计
智能小车电路原理图设计主要包括电机驱动模块、智能循迹模块(即红外传感器控制部分)、单片机控制模块以及电源模块等[4]。其中,单片机控制模块主要采用的是89C51型号单片机作为控制核心,电机驱动模块采用的是L298N芯片,该芯片的驱动输入级则是用功率型三极管,智能循迹模块主要采用的是ST178或GK178红外对管进行信号的发射与接收,并通过LM339比较器来判断信号电平的高低。电路设计原理图如图6所示。

图6 智能小车电路原理图
3.2 小车设计与实物演示
经过综合考虑论证,小车模型设计采用的是三轮结构型,即后两轮是电机驱动轮,车前部采用单轮万向轮[5]。后两轮(电机驱动轮)的物理参数要求完全一样(如力矩和转速等参数)。通过后两轮可以实现小车的前进、后退、停止以及左右转向等功能。比如,要实现小车的大转弯,可以通过控制左右两个电机驱动轮按照方向相反的角度进行转向,也可以实现小车的原地旋转等姿态。小车采用三轮结构主要考虑在快速行驶过程中的稳定性,但在设计的过程中要考虑后两轮具有同轴性。其中,前轮使用一个万向轮主要考虑小车重心偏移问题,因为万向轮转向十分灵活。这种三轮结构使得小车在前进时比较平稳。小车车体设计结构示意图如图7所示。智能小车实物图以及测试效果图如图8所示。

图7 小车车体设计结构示意图
4 结束语
本智能小车设计主要采用STC89C51单片机作为小车硬件的控制核心,通过ST178或GK178红外对管来实现小车行驶的智能循迹,即利用红外探测法来判断检测信号是否被反射回或被吸收,通过LM339双电压比较器来采集高低电平,输出高低电平到单片机控制模块;再结合电机驱动模块,即利用L298N芯片来控制后两轮的转速与方向。在软件设计方面,主要采用C程序作为编程控制语言,在小车设计、安装好后,将控制程序通过下载端口下载到单片机中,再对小车进行各功能的测试和调试,能够达到智能循迹、避障等功能,达到了设计的预期效果。

图8 智能小车实物图以及测试效果图